




1 多波束声纳原始数据
这个数据通常来自扫测船或者其它测绘设备。因为我这边暂时没有原始数据,所以使用的公开的加州海峡群岛的声纳数据。

在这里,XYZ数据 是描述水下地形或物体空间位置的核心数据集,每个数据点包含 经度(X)、纬度(Y)、水深(Z) 三个维度信息。
-119.69927,34.31851,-89.752
-119.69912,34.31851,-89.753
-119.69897,34.31851,-89.753
-119.69882,34.31851,-89.760
-119.69942,34.31836,-90.522
-119.69927,34.31836,-90.155
-119.69912,34.31836,-89.886
-119.69897,34.31836,-89.817
-119.69882,34.31836,-89.837
-119.69868,34.31836,-89.828
-119.69853,34.31836,-89.752
-119.69838,34.31836,-89.7192 数据建模
这一步是将xyz文件,转换成3D模型。比如DEM(Digital Elevation Model),这里有几种格式,用的最多的是GeoTIFF。
GeoTIFF:
是一种 地理栅格数据容器格式(文件格式标准),可以存储 任何类型的栅格数据(如高程、温度、卫星影像、分类图等)。 内容自由度:可包含单波段(如纯高程)或多波段(如RGB+高程+强度)。 扩展性:支持嵌入地理坐标、元数据、压缩算法等。
这里可以使用OSGeo4W软件Spatial without Compromise · QGIS Web Site,这个是免费的。
安装的大小有点恐怖。。。
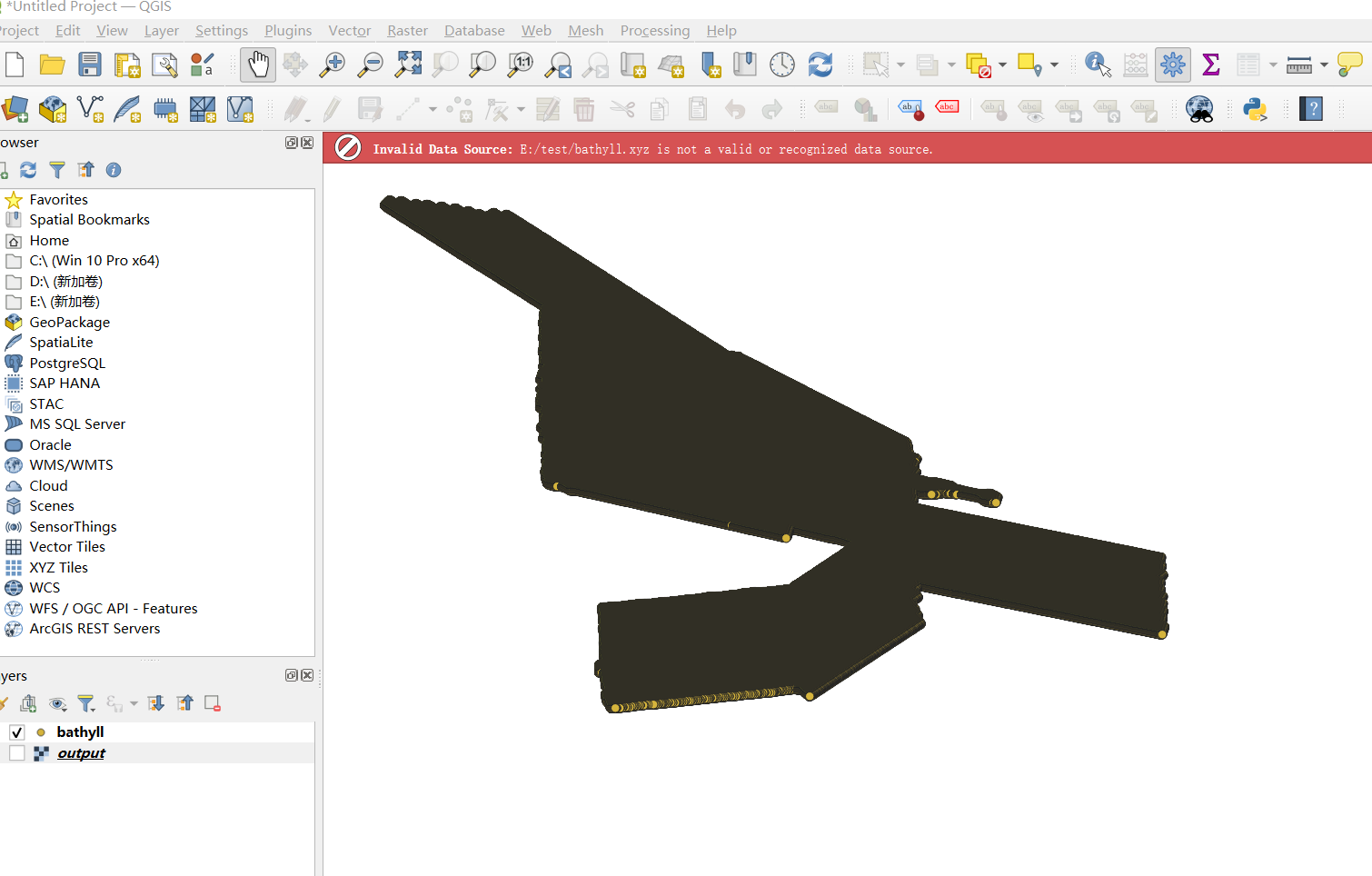
使用OGIS打开的xyz图。
使用IDW进行转换,log如下:
QGIS version: 3.40.9-Bratislava
QGIS code revision: 69fa2ab303
Qt version: 5.15.13
Python version: 3.12.11
GDAL version: 3.11.3
GEOS version: 3.13.1-CAPI-1.19.2
PROJ version: Rel. 9.5.0, September 15th, 2024
PDAL version: 2.9.0 (git-version: 42b180)
Algorithm started at: 2025-07-27T03:13:25
Algorithm 'IDW interpolation' starting…
Input parameters:
{ 'DISTANCE_COEFFICIENT' : 2, 'EXTENT' : '-119.753917583,-118.385515583,33.463768291,34.374771010 [EPSG:4326]', 'INTERPOLATION_DATA' : 'file:///E:/test/bathyll.xyz?type=csv&maxFields=10000&detectTypes=yes&xField=-119.69927&yField=34.31851&zField=-89.752&crs=EPSG:4326&spatialIndex=no&subsetIndex=no&watchFile=no::~::0::~::2::~::0', 'OUTPUT' : 'TEMPORARY_OUTPUT', 'PIXEL_SIZE' : 0.1 }
Execution completed in 30.37 seconds
Results:
OUTPUT: C:/Users/Administrator/AppData/Local/Temp/processing_vPksAR/1c7f82bd4efc47c7879b5691a0a4e1ea/OUTPUT.tif
Loading resulting layers
Algorithm 'IDW interpolation' finished最后创建的tif图。(我在这里转换的图很怪,感觉是哪里配置没对。。。)
也可以使用python来进行转换(中间要安装很多库)
import numpy as np
import pandas as pd
from scipy.interpolate import griddata
import rasterio
from rasterio.transform import from_origin
# 读取 xyz 数据
df = pd.read_csv("bathyll.xyz", header=None, names=["lon", "lat", "value"])
# 创建插值网格
grid_x, grid_y = np.mgrid[
df.lon.min():df.lon.max():500j,
df.lat.min():df.lat.max():500j
]
grid_z = griddata((df.lon, df.lat), df.value, (grid_x, grid_y), method='cubic')
# 创建 GeoTransform
res_lon = (df.lon.max() - df.lon.min()) / 500
res_lat = (df.lat.max() - df.lat.min()) / 500
transform = from_origin(df.lon.min(), df.lat.max(), res_lon, res_lat)
# 保存为 GeoTIFF
with rasterio.open("output.tif", "w",
driver="GTiff",
height=grid_z.shape[0],
width=grid_z.shape[1],
count=1,
dtype=grid_z.dtype,
crs="EPSG:4326",
transform=transform) as dst:
dst.write(grid_z, 1)
这个就是最后创建的tiff文件。
这个看着正常一些,但是和原始的xyz看着差异也不小。
3 格栅建模的原理
GeoTIFF 是规则栅格数据(即每个像素有一个固定大小),属于数字高程模型(DEM)。而XYZ 是散点。所以要进行转换。
规则栅格数据(Regular Grid Data)是一种 结构化 的空间数据表示形式,由 均匀分布的像素(或网格单元) 组成,每个像素包含一个数值(如高程、温度、浓度等)。其核心特征如下:
几何规则性
所有像素大小相同(如 1m×1m),按行列整齐排列。 地理范围由 原点坐标(左上角/左下角)和 像素大小 唯一确定。
数据存储
以矩阵形式存储,每个像素值可通过行列号(row, col)快速定位。
文件格式:GeoTIFF、ASCII Grid、NetCDF、HDF5 等。
| 特征 | 点云(Point Cloud) | 栅格(Raster/Grid) |
|---|---|---|
| 数据结构 | 非规则、稀疏 | 规则、密集的网格 |
| 数据量 | 仅保存有值的点 | 保存整个区域的所有格子(无论是否有值) |
| 空间表达 | 离散 | 连续(插值) |
| 存储 | 精简,适合稀疏场景 | 冗余,适合密集连续场景 |
| 应用方向 | 三维重建、激光雷达 | 地图、影像、DEM、遥感 |
适用场景:
| 场景 | 更适合点云 | 更适合栅格 |
|---|---|---|
| 三维扫描/激光雷达 | ✅ | ❌ |
| 遥感影像、地形图 | ❌ | ✅ |
| 稀疏海底测深数据 | ✅ | ❌ |
| 地形分析(坡度、流向) | ❌ | ✅ |
| AI 图像识别训练 | ❌ | ✅ |
点云就是点集合的描述,栅格就是将点数据放到矩阵。两者最大的不同就是存储的数据格式不同,数据一个是不连续一个是连续。使用栅格的最大好处就是方便运算,可以直接使用很多矩阵运算,比如卷积、滤波、插值等,也可以直接用GPU来加速。
将原始点云转化成栅格需要:离散的点云 → 连续的场 → 栅格化
算法有:
IDW(反距离加权)
插值 Kriging(克里金插值)
TIN三角网再栅格化
4 LAS和LAZ
las和laz也是点云文件,但是是二进制的。laz包含压缩。
LAS的文件头(Header):固定 375 字节
| 字段 | 字节长度 | 说明 |
|---|---|---|
| 文件签名(File Signature) | 4 字节 | 固定为 “LASF”,用于识别 LAS 文件。 |
| 文件版本(Version) | 2 字节 | 如 “1.4”(主版本号 1,次版本号 4),不同版本支持的属性字段有差异。 |
| 系统标识(System ID) | 32 字节 | 生成数据的系统名称(如传感器型号),不足 32 字节用空字符填充。 |
| 点云总数(Point Count) | 8 字节 | 记录文件中点的总数量(64 位整数,支持超大规模点云)。 |
| 坐标范围(Min/Max X/Y/Z) | 48 字节 | 6 个双精度浮点数(各 8 字节),记录点云在 X、Y、Z 轴上的最小 / 最大值,用于快速定位空间范围。 |
| 坐标比例因子(Scale X/Y/Z) | 24 字节 | 3 个双精度浮点数,用于将点数据中的整数坐标转换为实际物理坐标(见下文 “坐标存储原理”)。 |
| 坐标偏移量(Offset X/Y/Z) | 24 字节 | 3 个双精度浮点数,与比例因子配合实现坐标转换。 |
| 点数据格式(Point Data Format) | 1 字节 | 定义点数据记录的结构类型(如 0~6,不同类型支持的属性字段不同,例如格式 3 支持 RGB 颜色)。 |
| 点数据长度(Point Record Length) | 2 字节 | 每个点数据记录占用的字节数(如格式 3 对应 34 字节 / 点)。 |
点数据记录(Point Data Records):核心数据区
| 字段 | 字节长度 | 说明 |
|---|---|---|
| X/Y/Z 坐标(整数) | 4 字节 ×3 | 实际坐标需通过公式计算:实际坐标 = 整数坐标 × 比例因子 + 偏移量(见下文)。 |
| 反射强度(Intensity) | 2 字节 | 0~65535 的整数,反映激光回波强度(材质越亮,强度越高)。 |
| 回波信息(Return Flags) | 1 字节 | 二进制位标识(如第 1 位表示是否为首次回波,第 3 位表示是否为末次回波)。 |
| 分类标签(Classification) | 1 字节 | 整数代码(如 2 = 地面、6 = 建筑物、9 = 植被),用于点云分类。 |
| RGB 颜色 | 2 字节 ×3 | 红、绿、蓝三通道值(0~65535),记录点的颜色信息。 |
有两种方法转换,一种是代码一种是pdal工具。
PDAL转换
运行命令:
pdal pipeline xyz2las.jsonxyz2las.json
{
"pipeline": [
{
"type": "readers.text",
"filename": "bathyll.xyz",
"header": "X,Y,Z",
"separator": ","
},
{
"type": "writers.las",
"filename": "output.las"
}
]
}
pdal info output.las
tom@PC-20241221RKUQ:~/test$ pdal info output.las
{
"file_size": 131792591,
"filename": "output.las",
"now": "2025-07-27T22:25:29+0800",
"pdal_version": "2.6.2 (git-version: Release)",
"reader": "readers.las",
"stats":
{
"bbox":
{
"native":
{
"bbox":
{
"maxx": -119.05,
"maxy": 34.32,
"maxz": -25.66,
"minx": -119.7,
"miny": 33.89,
"minz": -1244.45
},
"boundary": { "type": "Polygon", "coordinates": [ [ [ -119.7, 33.89, -1244.45 ], [ -119.7, 34.32, -1244.45 ], [ -119.05, 34.32, -25.66 ], [ -119.05, 33.89, -25.66 ], [ -119.7, 33.89, -1244.45 ] ] ] }
}
},
"statistic":
[
{
"average": -119.3893761,
"count": 3876246,
"maximum": -119.05,
"minimum": -119.7,
"name": "X",
"position": 0,
"stddev": 0.1361889993,
"variance": 0.01854744352
},
{
"average": 34.07363823,
"count": 3876246,
"maximum": 34.32,
"minimum": 33.89,
"name": "Y",
"position": 1,
"stddev": 0.1018629814,
"variance": 0.01037606697
},
{
"average": -328.1332479,
"count": 3876246,
"maximum": -25.66,
"minimum": -1244.45,
"name": "Z",
"position": 2,
"stddev": 233.8208149,
"variance": 54672.17348
},
......python转换
import numpy as np
import laspy
# 1. 读取 xyz 文件
xyz_file = "input.xyz"
xyz = np.loadtxt(xyz_file, usecols=(0, 1, 2)) # 只读取前三列,作为 x,y,z
# 2. 创建 LAS header
header = laspy.LasHeader(point_format=3, version="1.2") # 可选点格式和版本
header.offsets = np.min(xyz, axis=0)
header.scales = np.array([0.001, 0.001, 0.001]) # 设置精度
# 3. 创建 LAS 文件并写入点
las = laspy.LasData(header)
las.x, las.y, las.z = xyz[:, 0], xyz[:, 1], xyz[:, 2]
# 4. 保存为 .las 文件
las.write("output.las")
print("转换完成:output.las")
LAZ则是压缩过的LAS文件。
5 在Web的显示
在web显示中,需要使用3D tile。整体转换如下:
| 数据格式 | 描述 | 转换路径(→ 3D Tiles) |
|---|---|---|
.tif (DEM) | 高程栅格 | tif → terrain tiles → Cesium 可加载 |
.tif (影像) | 遥感地图 | tif → WMS/WMTS 叠加 → Cesium |
.xyz | 点云(文本) | .xyz → .las → 3D Tiles |
.las/.laz | 标准点云格式 | 直接 → 3D Tiles |
.obj/.gltf | 3D模型 | 直接 → 3D Tiles |
生成LAS之后,可以直接在Cesium网站转换。
5.1 Cesium转换
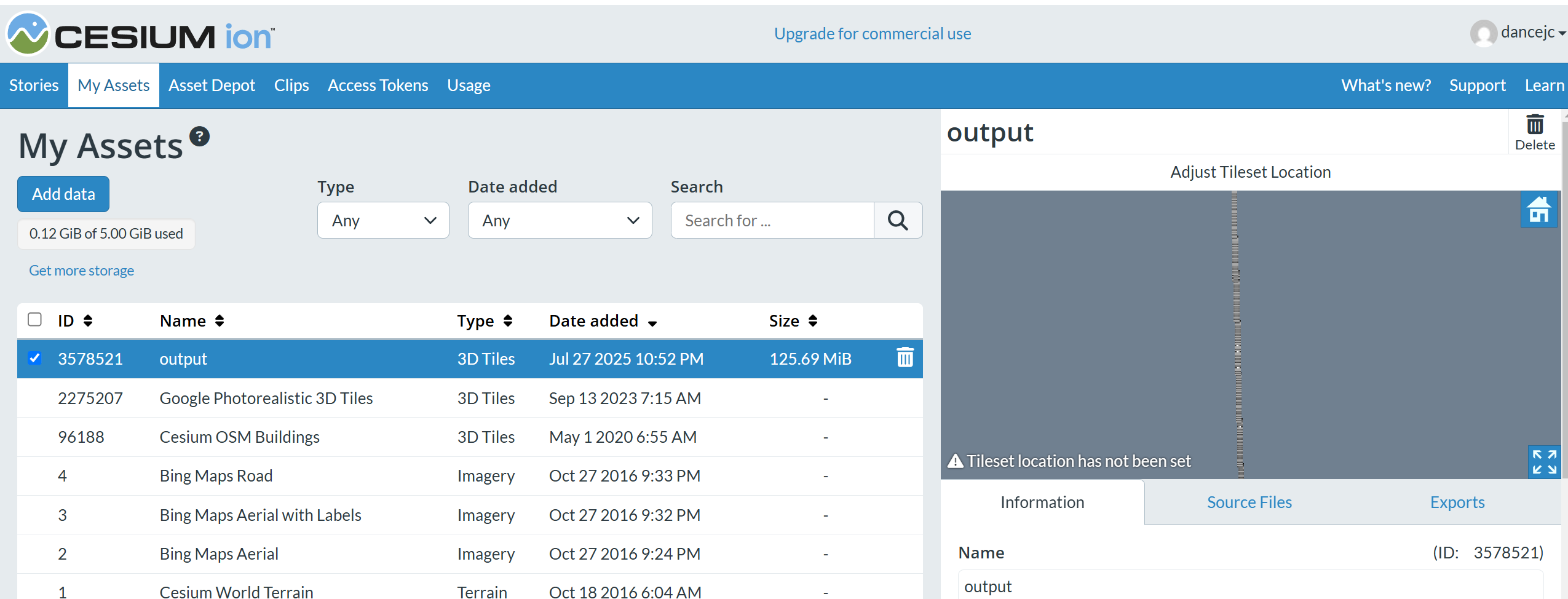
设置了位置之后,就会自动在地图上显示。(我的地图感觉设置还是有点问题。。。)

5.2 命令工具转换
另外一种方式是使用命令转换。
流程是 LAS->EPT 点云格式(分层瓦片,结构化)->3D Tiles (.pnts + tileset.json)
LAS->EPT
Entwine Point Tile 格式5:这是一种基于八叉树的简单灵活的点云数据存储格式。EPT 数据集的组织包含 JSON 元数据部分以及二进制点数据,FME 等软件可将 ept.json 文件视为一个数据集,每个数据集包含一个点云要素。这种格式常用于处理大规模点云数据,便于数据的存储、管理和传输。
一般使用Entwine转换。 安装Entwine就可以进行转换,但是一般是使用docker转换。(目前还是报错,暂时没找到原因)
tom@PC-20241221RKUQ:~/test$ docker run --rm -v $(pwd):/data connormanning/entwine build -i output.las -o output
1/1: output.las
- Skipping output.las
terminate called after throwing an instance of 'nlohmann::detail::out_of_range'
what(): [json.exception.out_of_range.403] key 'bounds' not found
EPT ->3D Tiles
通常使用 entwine2tiles 或 cesium-ion 平台进一步转换
| 特性 | EPT (Entwine Point Tile) | 3D Tiles (.pnts) |
|---|---|---|
| 是否原始点云格式 | 是 | 否(已转换) |
| 是否支持 Cesium | 是(新版) | 是(广泛支持) |
| 加载速度 | 快(渐进式) | 快(预处理优化) |
| 精度 | 高 | 可能略有损失 |
| 文件大小 | 小(支持 LAZ) | 较大 |
| 可嵌入自定义属性 | 有限 | 支持更复杂属性 |
| 是否需要转换工具 | 否 | 需要使用 entwine convert |


















 6569
6569

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









