



 本文介绍如何在RViz中使用nav_msgs/GridCells消息类型来实现以栅格形式而非点云形式显示无人车激光雷达数据的方法。通过示例代码演示如何创建并发布栅格单元。
本文介绍如何在RViz中使用nav_msgs/GridCells消息类型来实现以栅格形式而非点云形式显示无人车激光雷达数据的方法。通过示例代码演示如何创建并发布栅格单元。
在rviz中以栅格为单位显示。用处:比如,无人车激光雷达点云数据栅格化后经过筛选,需要将栅格显示出来,而不再是以点的形式。
方法:使用nav_msgs/GridCells消息。该消息类型为:
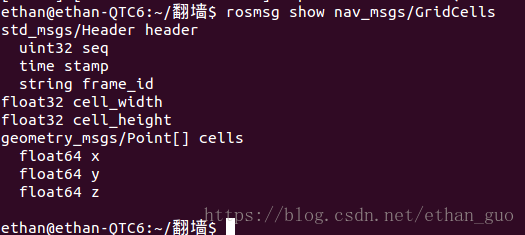
示例:
//
// Created by ethan on 18-6-26.
//
#include <iostream>
#include <ros/ros.h>
#include <nav_msgs/GridCells.h>
int
main(int argc,char **argv)
{
ros::init(argc,argv,"grid_cell");
ros::NodeHandle nh;
ros::Publisher pub;
nav_msgs::GridCells cells;
cells.header.frame_id=" ";
cells.cell_height=0.3;
cells.cell_width=0.3;
cells.cells.resize(3);
cells.cells[0].x=1;
cells.cells[0].y=1;
cells.cells[0].z=0;
pub = nh.advertise<nav_msgs::GridCells>("/cells", 1);
while (ros::ok())
{
pub.publish(cells);
}
}效果:
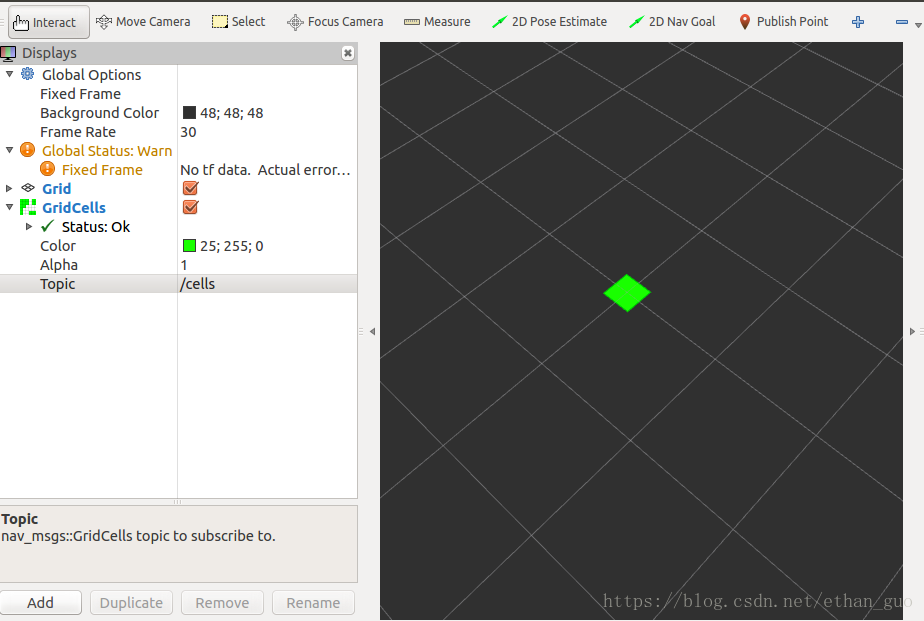
(这几天弄得东西还没搞透彻,主要是vector、类、智能指针之间的相互嵌套关系对我来说太复杂了,需要在目前的手头工作完成后好好下功夫琢磨,到时候再好好写一篇。任重道远,有明确的方向奋斗已经很幸福了!加油!)

















 2354
2354

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









