




 文章详细描述了如何使用Verilog语言设计一个具有一个输入、一个输出和四个状态的Moore型状态机,并包含一个异步重置功能,将状态机重置回初始状态A。两种不同的状态机实现方式被展示,包括状态转移逻辑和输出逻辑的代码。
文章详细描述了如何使用Verilog语言设计一个具有一个输入、一个输出和四个状态的Moore型状态机,并包含一个异步重置功能,将状态机重置回初始状态A。两种不同的状态机实现方式被展示,包括状态转移逻辑和输出逻辑的代码。
See also: State transition logic for this FSM
The following is the state transition table for a Moore state machine with one input, one output, and four states. Implement this state machine. Include an asynchronous reset that resets the FSM to state A.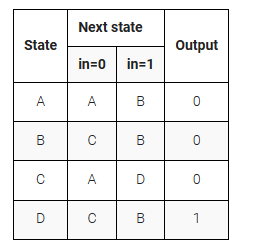
一种写法
module top_module(
input clk,
input in,
input areset,
output out); //
parameter A = 2'b00,
B = 2'b01,
C = 2'b11,
D = 2'b10;
reg [1:0] state;
reg [1:0] next_state;
// State transition logic
always@ (*) begin
case(state)
A:if(in == 1)
next_state <= B;
else
next_state <= A;
B:if(in == 0)
next_state <= C;
else
next_state <= B;
C:if(in == 1)
next_state <= D;
else
next_state <= A;
D:if(in == 1)
next_state <= B;
else
next_state <= C;
default: next_state <= A;
endcase
end
// State flip-flops with asynchronous reset
always@(posedge clk or posedge areset)
if(areset)
state <= A;
else
state <= next_state;
// Output logic
assign out = state == D ? 1'b1 : 1'b0;
endmodule
另一种写法
module top_module(
input clk,
input in,
input areset,
output out); //
parameter A = 2'b00,
B = 2'b01,
C = 2'b11,
D = 2'b10;
reg [1:0] state;
reg [1:0] next_state;
// State transition logic
always@ (*) begin
state <= next_state;
end
// State flip-flops with asynchronous reset
always@(posedge clk or posedge areset)
if(areset)
next_state <= A;
else
case(next_state)
A:if(in == 1)
next_state <= B;
else
next_state <= A;
B:if(in == 0)
next_state <= C;
else
next_state <= B;
C:if(in == 1)
next_state <= D;
else
next_state <= A;
D:if(in == 1)
next_state <= B;
else
next_state <= C;
default: next_state <= A;
endcase
// Output logic
assign out = state == D ? 1'b1 : 1'b0;
endmodule


















 319
319

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











