




一、关节模组是什么?
作为机器人重要零部件,关节模组能实现快速生产、快速组建机器人,能够省掉上百种机械电子器件选型、设计、采购、组装的人力和时间成本。
二、关节模组有什么?
零差云控关节模组八大核心
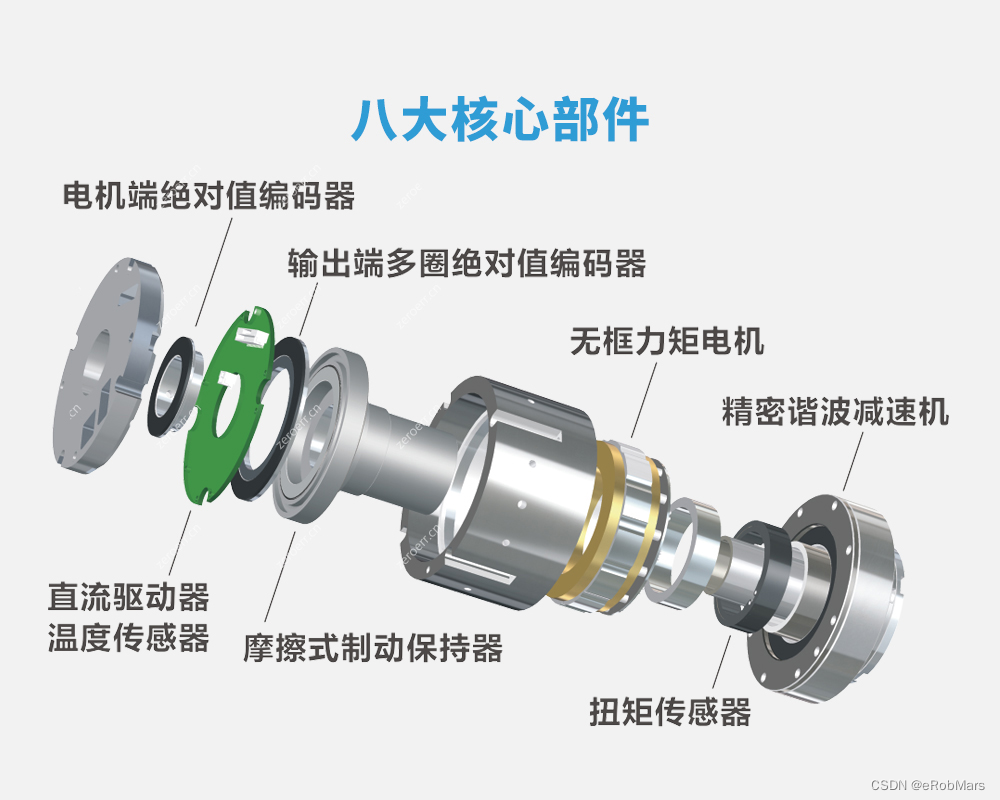
1.电机端绝对值编码器
绝对值编码器17位,用于采集电机端的绝对位置速度。
2.输出端多圈绝对值编码器
20位绝对值编码器,用于采集输出端绝对位置,重复定位精度高达±7角秒,绝对定位精度高达±15角秒,可记忆单圈及多圈断电位置,全闭环控制,无磨损精度。<
 本文介绍了机器人关节模组的重要性和组成部分,包括零差云控关节模组的八大核心特性,如绝对值编码器、无框力矩电机、谐波减速机等。此外,还提及了通讯协议和不同类型的关节模组系列。
本文介绍了机器人关节模组的重要性和组成部分,包括零差云控关节模组的八大核心特性,如绝对值编码器、无框力矩电机、谐波减速机等。此外,还提及了通讯协议和不同类型的关节模组系列。
一、关节模组是什么?
二、关节模组有什么?
零差云控关节模组八大核心
1.电机端绝对值编码器
绝对值编码器17位,用于采集电机端的绝对位置速度。
2.输出端多圈绝对值编码器
20位绝对值编码器,用于采集输出端绝对位置,重复定位精度高达±7角秒,绝对定位精度高达±15角秒,可记忆单圈及多圈断电位置,全闭环控制,无磨损精度。<
 4585
4585

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























