







Canny边缘检测
文章目录
1、概述
Canny边缘检测是多阶段优化的方法,该方法严格遵循以下三个准则:
1.1、高信噪比。
这一准则说明好的检测效果要具有高的信噪比,对于图像的边缘要能够实实在在地检测到,对于图像中非边缘的部分,不能够被检测成边缘。
1.2、控制对边缘检测的精度。
指算法所检测的边缘要尽可能的逼近实际的边缘,这是边缘检测算法的基本要求,检测精度直接反映了一个算法的好坏。
1.3、降低对同一边缘的相应次数。
对于检测的图像边缘,应该准确检测出边缘点,避免出现伪边缘。
2、步骤:
Canny边缘检测算法的具体的实现步骤为:
2.1、对图像进行高斯平滑
由于图像中的边缘信息对噪声比较敏感,因此使用滤波器来对噪声进行处理,这里使用的高斯平滑用来削弱图像中的噪声对边缘信息提取的影响,对于图像 ,有

其中,⊗表示卷积运算,  ,
,  ,σ表示高斯卷积的平滑因子。σ越大图像越平滑,对于噪声越不敏感,σ越小图像平缓程度越小,对噪声越敏感。
,σ表示高斯卷积的平滑因子。σ越大图像越平滑,对于噪声越不敏感,σ越小图像平缓程度越小,对噪声越敏感。
2.2、求梯度的方向和幅值
对经过高斯平滑后的图像 再求其偏导,得到图像的偏导数
再求其偏导,得到图像的偏导数 和
和 ,对其求方向和幅值
,对其求方向和幅值
2.3、非极大值抑制
图像中像素点导数的幅值大,但是不能够认定该点是边缘点。非极大值抑制就是指在图像中的局部最大值里,将非极大值点进行剔除,不对这些点进行进一步的检测,这样可以将一些由噪声引起的、出现局部梯度较大而可能会成为伪边缘的点剔除掉。实现起来就是将点 与邻域的8个点按导数减小的方向进行幅值比较,若点
与邻域的8个点按导数减小的方向进行幅值比较,若点 小于该方向的两个邻域的点的值,那么该点不是极大值,在此处将该点梯度的幅值置0。
小于该方向的两个邻域的点的值,那么该点不是极大值,在此处将该点梯度的幅值置0。
2.4、图像二值化
双阈值检测指的是首先使用高阈值进行对图像边缘的检测,检测到高于阈值的点就将置设为255,低于阈值的点就置为0。这时得到的图像边缘虽然比较真实,噪声也很少,但是图像边缘信息丢失比较严重,这时使用低阈值在高阈值的邻域进行二次检测,由于图像边缘一般都是连续的,所以检测到的新边缘可以填充高阈值检测到的图像边缘的缝隙中,完成边缘的提取。
阈值的取值关系到检测结果,阈值的取值对于图像边沿的提取至关重要,为了使选取的阈值能够适应不同场景的图像,选择使用图像直方图确定高阈值,统计梯度幅值大小为 的点的数量,得到函数

 表示幅值大小为i的点的数量,则每个幅值大小相同的点在图像中的概率为
表示幅值大小为i的点的数量,则每个幅值大小相同的点在图像中的概率为
其中N表示图像中像素点的总数量,根据统计的梯度幅值大小的信息设置双阈值的高阈值,然后取高阈值的一半作为低阈值。
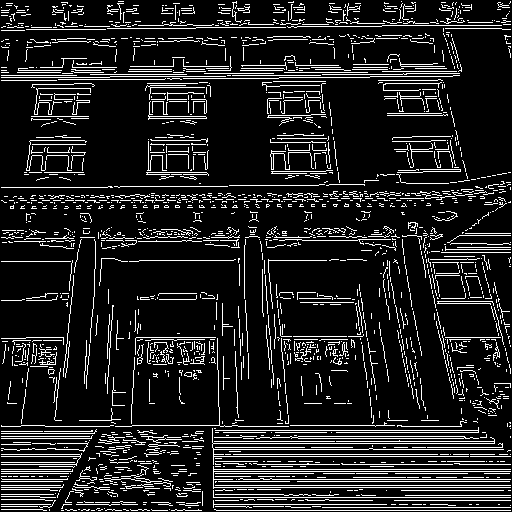
实验验证:
σ取0.3,高阈值取0.6
原图:

检测结果:
3、C语言实现:
/*/////////////////////////////////////////////////////////////////////
函数名:int CannyEdge()
结果:double Canny[IMGROWS][IMGCOLS];
*//////////////////////////////////////////////////////////////////////
int CannyEdge()
{
int i,j,k,l;
int tempSize=0;
double m,n;
char name[20];
double sigma=0.3;//0.4;
double number;//中间变量
double gaussConall;
double conBuff=0.0;
double conBuffSum=0.0;
double g1=0, g2=0, g3=0, g4=0; //中间变量
double dTmp1=0.0, dTmp2=0.0; //中间变量
double dWeight=0.0; //插值权重
int grayHist[50000]={0}; //只能用于灰度图像
double maxMag=0; //最大梯度值
int notEdgeNum=0;
double RatHigh = 0.6; //直方图的比例
double ThrHigh;
double ThrLow;
double RatLow = 0.6;
int HighCount=0;
FILE *fpTarget;
////////////////////////高斯滤波 使用一维x2///////////////////////
tempSize=(int)(sigma*6+1.9);//保证模板尺寸
printf("\nsigma: %f\n",sigma);
if(!(tempSize&1))
{
tempSize++;
}
gaussConall=0;
number=sqrt(2.0*Pi)*sigma;
for(i=0;i<tempSize;i++)
{
m=i-tempSize/2;
gaussCon1[i]=(exp(-(m*m)/(2.0*sigma*sigma)))/number;
gaussConall+=gaussCon1[i];
//printf("gaussCon1 %d : %f\n",i,gaussCon1[i]);
}
for(i=0;i<tempSize;i++)//归一化
{
gaussCon1[i]/=gaussConall;
//printf("gaussCon1 %d : %f\n",i,gaussCon1[i]);
}
//printf("tempSize: %d\n",tempSize);
for(i=0;i<IMGROWS;++i)//横向
{
for(j=0;j<IMGCOLS;++j)
{
conBuff=0;
conBuffSum=0;
for(k=0;k<tempSize;++k)
{
if(j-(tempSize-1)/2+k>=0&&j-(tempSize-1)/2+k<IMGCOLS)
{
conBuff+=(gaussCon1[k]*(double)BMPHEAD.grayMatrix[i][j-(tempSize-1)/2+k]);
conBuffSum+=gaussCon1[k];
}
}
imageMid[i][j]=conBuff/conBuffSum;
}
}/*for(i=0;i<IMGROWS;++i)*/
for(j=0;j<IMGCOLS;++j)//纵向
{
for(i=0;i<IMGROWS;++i)
{
conBuff=0;
conBuffSum=0;
for(k=0;k<tempSize;++k)
{
if(i-(tempSize-1)/2+k>=0&&i-(tempSize-1)/2+k<IMGCOLS)
{
conBuff+=(gaussCon1[k]*imageMid[i-(tempSize-1)/2+k][j]);
conBuffSum+=gaussCon1[k];
}
}
image1[i][j]=conBuff/conBuffSum;
}
}/*for(i=0;i<IMGROWS;++i)*/
for(i=0;i<BMPHEAD.rows;i++)
{
for(j=0;j<BMPHEAD.cols;j++)
{
imageShow[i][j]=(unsigned char)image1[i][j];//(gradientMag[i][j]*100);
// image1[i][j]=BMPHEAD.grayMatrix[i][j];
}
}
matrix2bmp8("gauss.bmp");
for(i=0; i<(IMGROWS-1); i++)//求偏导数
{
for(j=0; j<(IMGCOLS-1); j++)
{
dx[i][j] = (image1[i][j+1]-image1[i][j]+image1[i+1][j+1]-image1[i][j]+image1[i-1][j+1]-image1[i][j]+image1[i][j]-image1[i][j-1]+image1[i][j]-image1[i-1][j-1]+image1[i][j]-image1[i+1][j-1])/6.0;//+(image1[i+1][j+1]-image1[i][j]+image1[i+1][j-1]-image1[i][j]+image1[i-1][j+1]-image1[i][j]+image1[i-1][j-1]-image1[i][j])/8;
dy[i][j] = (image1[i+1][j]-image1[i][j]+image1[i+1][j+1]-image1[i][j]+image1[i+1][j-1]-image1[i][j]+image1[i][j]-image1[i-1][j]+image1[i][j]-image1[i-1][j-1]+image1[i][j]-image1[i-1][j+1])/6.0;//+(image1[i+1][j+1]-image1[i][j]+image1[i+1][j-1]-image1[i][j]+image1[i-1][j+1]-image1[i][j]+image1[i-1][j-1]-image1[i][j])/8;
}
}
for(i=0; i<IMGROWS; i++)//梯度幅值和方向
{
for(j=0; j<IMGCOLS; j++)
{
gradientMag[i][j] = sqrt(dx[i][j]*dx[i][j] + dy[i][j]*dy[i][j]);
gradientDir[i][j] = atan2(dy[i][j], dx[i][j]) * 180/Pi;
if(gradientDir[i][j] < 0)
gradientDir[i][j] += 360; //0--360
}
// printf("%f\n",gradientDir[i][50]);
}
////////////////极大值抑制//////////////////////
for(i=1; i<(IMGROWS-1); i++)
{
for(j=1; j<(IMGCOLS-1); j++)
{
if(gradientMag[i][j] == 0)
{
notGreat[i][j] = 0; //如果当前梯度幅值为0,则不是局部最大,对该点赋为0
}
else
{
////////首先判断属于那种情况,然后根据情况插值///////
////////////////////第一种情况///////////////////////
///////// g1 g2 /////////////
///////// C /////////////
///////// g3 g4 /////////////
/////////////////////////////////////////////////////
if( ((gradientDir[i][j]>=90)&&(gradientDir[i][j]<135)) ||
((gradientDir[i][j]>=270)&&(gradientDir[i][j]<315)))
{
//////根据斜率和四个中间值进行插值求解
g1 = gradientMag[i-1][j-1];
g2 = gradientMag[i-1][j];
g3 = gradientMag[i+1][j];
g4 = gradientMag[i+1][j+1];
dWeight = fabs(dx[i][j])/fabs(dy[i][j]); //反正切
dTmp1 = g1*dWeight+g2*(1.0-dWeight);
dTmp2 = g4*dWeight+g3*(1.0-dWeight);
// printf("90");
}
////////////////////第二种情况///////////////////////
///////// g1 /////////////
///////// g2 C g3 /////////////
///////// g4 /////////////
/////////////////////////////////////////////////////
else if( ((gradientDir[i][j]>=135)&&(gradientDir[i][j]<180)) ||
((gradientDir[i][j]>=315)&&(gradientDir[i][j]<360)))
{
g1 = gradientMag[i-1][j-1];
g2 = gradientMag[i][j-1];
g3 = gradientMag[i][j+1];
g4 = gradientMag[i+1][j+1];
dWeight = fabs(dy[i][j])/fabs(dx[i][j]); //正切
dTmp1 = g2*dWeight+g1*(1.0-dWeight);
dTmp2 = g4*dWeight+g3*(1.0-dWeight);
// printf("180");
}
////////////////////第三种情况///////////////////////
///////// g1 g2 /////////////
///////// C /////////////
///////// g4 g3 /////////////
/////////////////////////////////////////////////////
else if( ((gradientDir[i][j]>=45)&&(gradientDir[i][j]<90)) ||
((gradientDir[i][j]>=225)&&(gradientDir[i][j]<270)))
{
g1 = gradientMag[i-1][j];
g2 = gradientMag[i-1][j+1];
g3 = gradientMag[i+1][j];
g4 = gradientMag[i+1][j-1];
dWeight = fabs(dx[i][j])/fabs(dy[i][j]); //反正切
dTmp1 = g2*dWeight+g1*(1.0-dWeight);
dTmp2 = g3*dWeight+g4*(1.0-dWeight);
// printf("270");
}
////////////////////第四种情况///////////////////////
///////// g1 /////////////
///////// g4 C g2 /////////////
///////// g3 /////////////
/////////////////////////////////////////////////////
else if( ((gradientDir[i][j]>=0)&&(gradientDir[i][j]<45)) ||
((gradientDir[i][j]>=180)&&(gradientDir[i][j]<225)))
{
g1 = gradientMag[i-1][j+1];
g2 = gradientMag[i][j+1];
g3 = gradientMag[i+1][j-1];
g4 = gradientMag[i][j-1];
dWeight = fabs(dy[i][j])/fabs(dx[i][j]); //正切
dTmp1 = g1*dWeight+g2*(1.0-dWeight);
dTmp2 = g3*dWeight+g4*(1.0-dWeight);
//printf("225");
}
}
//////////进行局部最大值判断,并写入检测结果////////////////
if((gradientMag[i][j]>=dTmp1) && (gradientMag[i][j]>=dTmp2))
{
notGreat[i][j] = 128;
//printf("1");
}
else
{
notGreat[i][j] = 0;
//printf("\n");
}
}
}
test=0;
for(i=1; i<(IMGROWS-1); i++)
{
for(j=1; j<(IMGCOLS-1); j++)
{
if(gradientMag[i][j]>test)
{
test=gradientMag[i][j];
}
}
}
//////////////////////双阈值检测////////////////////////
for(i=1; i<(IMGROWS-1); i++)
{
for(j=1; j<(IMGCOLS-1); j++)
{
if(notGreat[i][j] == 128)
grayHist[(int)(gradientMag[i][j]*255.0/test)]++;
}
}
/* test=10000;
for(i=1; i<(IMGROWS-1); i++)
{
for(j=1; j<(IMGCOLS-1); j++)
{
if(gradientMag[i][j]<test)
{
test=gradientMag[i][j];
}
}
}
printf("////////////////////%f\n",test);*/
notEdgeNum=0;
for(i=1; i<50000; i++) //统计有多少像素
{
if(grayHist[i] != 0)
{
maxMag = (double)(i)*test/255.0;
}
notEdgeNum += grayHist[i];
}
HighCount = (int)(RatHigh * notEdgeNum + 0.5);
printf("HighCount : %d\n",HighCount);
for(i=0;i<50000;++i)
{
HighCount-=grayHist[i];
printf("HighCount : %d\n",HighCount);
if(HighCount<0)
{
ThrHigh=(double)(i)*test/255.0;
// printf("i : %d\n",i);
//
break;
}
}
ThrLow = ThrHigh*RatLow;
printf("ThrHigh : %f\n",ThrHigh);
printf("ThrLow : %f\n",ThrLow);
for(i=1; i<(IMGROWS-1); i++)
{
for(j=1; j<(IMGCOLS-1); j++)
{
if((notGreat[i][j]==128) && (gradientMag[i][j] >= ThrHigh)) //强边界
{
Canny[i][j] = 255;
//notGreat[i][j] = 255;
}
}
}
for(i=2; i<(IMGROWS-2); i++)
{
for(j=2; j<(IMGCOLS-2); j++)
{
if((Canny[i][j] != 255)&& (notGreat[i][j]==128) && (gradientMag[i][j]>= ThrLow) && (255==Canny[i+1][j]||255==Canny[i-1][j]||255==Canny[i][j+1]||255==Canny[i][j-1]||255==Canny[i+1][j+1]||255==Canny[i+1][j-1]||255==Canny[i-1][j+1]||255==Canny[i-1][j-1])) //弱边界
{
Canny[i][j] = 255;
// printf("////////////////////%d\n",j);
}
}
// printf("弱边界\n");
}
return 1;
}


















 270
270

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









