



 本文详细介绍了如何从GitHub上下载并配置carla-ros-bridge,包括创建catkin工作空间,克隆代码,配置ROS环境,安装rosdep,编译和运行RosBridge,以及处理可能出现的错误,如Python版本问题。
本文详细介绍了如何从GitHub上下载并配置carla-ros-bridge,包括创建catkin工作空间,克隆代码,配置ROS环境,安装rosdep,编译和运行RosBridge,以及处理可能出现的错误,如Python版本问题。
从 GitHub 上的源码编译安装
# 1. 创建catkin工作空间
mkdir -p ~/carla-ros-bridge/catkin_ws/src
# 2. 克隆ROS Bridge存储库和子模块
cd ~/carla-ros-bridge
git clone --recurse-submodules https://github.com/carla-simulator/ros-bridge.git catkin_ws/src/ros-bridge
# 3. 配置ROS环境(根据安装的ROS版本)
source /opt/ros/melodic/setup.bash
source /opt/ros/noetic/setup.bash
# 4. 安装中文版的rosdepc,主目录下打开终端,输入
wget http://fishros.com/install -O fishros &&. fishros
选择3,一键配置 rosdep
# 5. 进入catkin工作空间
cd ~/carla-ros-bridge/catkin_ws/
sudo rosdepc init #初始化
rosdepc update #更新
rosdepc install --from-paths src --ignore-src -r #安装依赖
# 6. Build ROS bridge
catkin build
可能会报错

解决办法
运行 Ros bridge
# 1. 打开一个 carla 服务器
cd ~/tools/CARLA_0.9.13
./CajrlaUE4.sh
# 2. 将Carla相关模块添加到Python路径
export PYTHONPATH=$PYTHONPATH:$CARLA_ROOT/PythonAPI/carla/dist/carla-<carla_version_and_arch>.egg:$CARLA_ROOT/PythonAPI/carla
# 示例
export PYTHONPATH=$PYTHONPATH:$CARLA_ROOT/PythonAPI/carla/dist/carla-<carla_version_and_arch>.egg:$CARLA_ROOT/PythonAPI/carla
# 3. 将 ros bridge 的工作空间添加到路径
source ~/carla-ros-bridge/catkin_ws/devel/setup.bash
# 这个步骤在每个你想要运行Ros bridge的终端都要执行一次。可以永久设置,提醒:在与其它工作空间一起运行的时候,这可能会造成 conflict
# 4. 开始运行 ros bridge ,使用以下任何一个启动文件 (launch file)
# Option 1: 启动 ros bridge
roslaunch carla_ros_bridge carla_ros_bridge.launch
# Option 2: 启动带有ego vehicle的ros bridge
roslaunch carla_ros_bridge carla_ros_bridge_with_example_ego_vehicle.launch
可能出现报错
”pyhton”:没有那个文件或目录
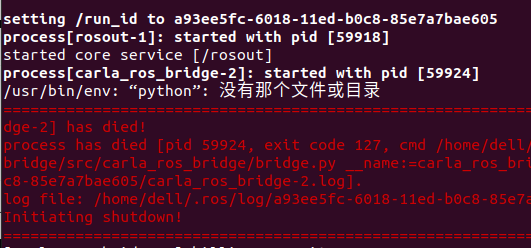
解决办法:建立python3.8 与 pyhton的软连接
whereis python3.8 #找出python3.8的位置
cd /usr/bin
sudo ln -s /usr/bin/python3.8 python #配置软连接
再执行
roslaunch carla_ros_bridge carla_ros_bridge_with_example_ego_vehicle.launch

安装成功!


















 2954
2954

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









