




在视觉测量与定位的应用中,我们经常会遇到这样的场景。通过二值化以及形态学计算,我们获得了一些独立的区域,想要获取这些区域对应最小包围矩形的4个角点。对于某个区域,利用smallest_rectangle2算子,可以轻松获得其中心、角度,以及两个半长度。根据矩形长边方向的不同,计算4分角点的过程也会有所差异。
为了获得统一且一致的效果。本文给出了2种可行的方法,并且已经进行封装测试,可以直接运行使用。以供各位读者参考学习。
1.原理介绍
方法1:使用方向向量
1.1矩形长轴与垂直方向呈现锐角
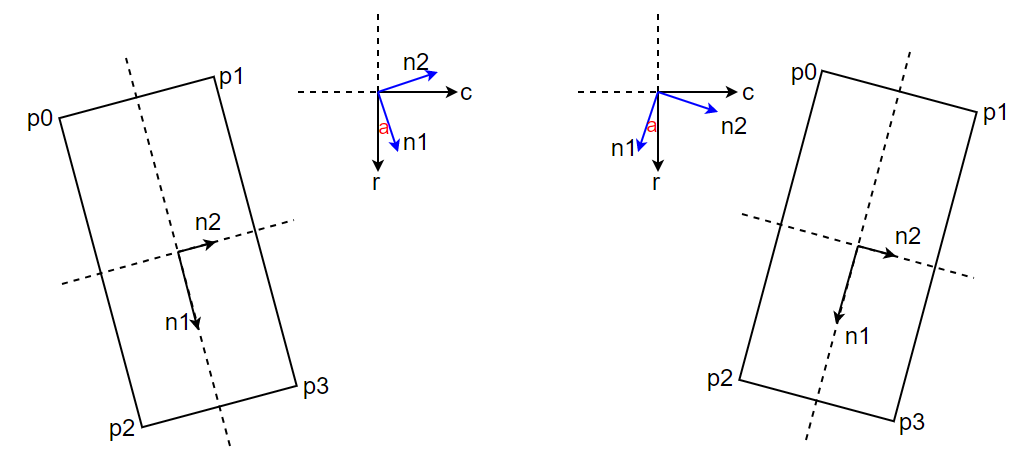
如上图所示,左有两侧矩形的长轴角度分别为-70°和70°。假设长轴和短轴的方向向量分别为n_{1} 和n_{2} 。并且假设长轴方向向量与垂直方向夹角的绝对值为。易知两侧的符号函数sgn(x)取值分别为-1和1。现在我们可以写出左右两侧矩形方向向量的表达式:
左侧矩形的方向向量为:
右侧矩形的方向向量为:
利用sgn(x)函数,将两者组合,可以写为:
1.2矩形长轴与水平方向呈现锐角
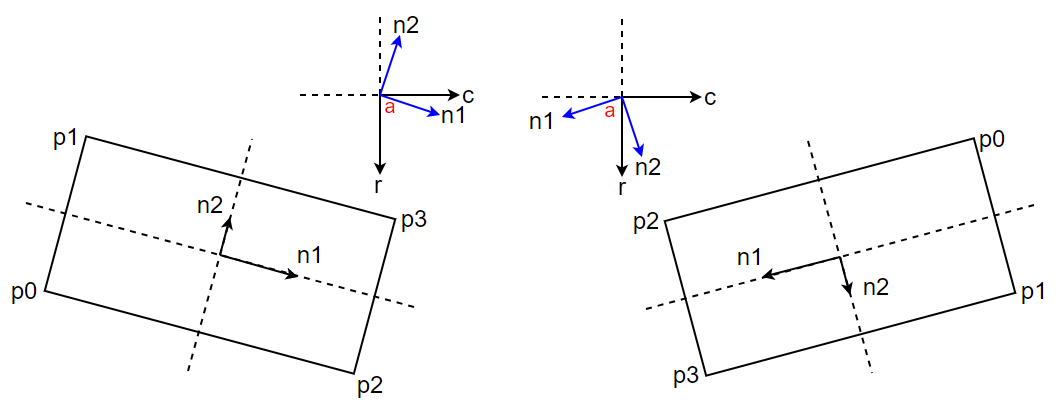
如上图所示,左有两侧矩形的长轴角度分别为-20°和20°。假设长轴和短轴的方向向量分别为n_{1} 和n_{2} 。并且假设长轴方向向量与垂直方向夹角的绝对值为。易知两侧的符号函数sgn(x)取值分别为-1和1。现在我们可以写出左右两侧矩形方向向量的表达式:
左侧矩形的方向向量为:
右侧矩形的方向向量为:
利用sgn(x)函数,将两者组合,可以写为:
可见1.1和1.2中最终的形式一样。这是由于角度大小统一设置为矩形长轴与垂直方向的夹角。
方法2:使用仿射变换
假设我们将矩形旋转,使得其长轴方向置于水平,则容易获得其4个角点的坐标。由于旋转角度是已知的,因此我们可以将刚才获得的4个角点坐标变换回去。此时,便可得到原先的4个角点的坐标。不过,需要注意各角点的顺序。
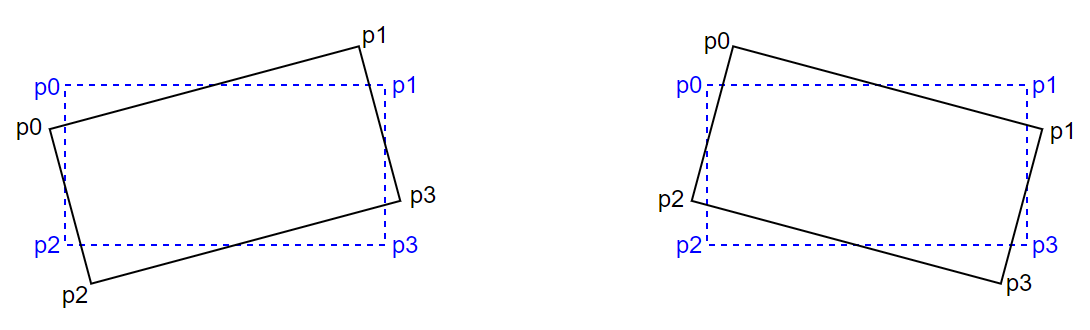
如上图所示,左右两侧倾斜矩形的角度分别为20°和-20°。对应的符号函数sgn(x)的取值分别为1和-1。
矩形变换前后的4各角点坐标都为(p0,p1,p2,p3)。为了与方法1中输出结果的角点顺序一致,需要将方法2输出结果重新排序。
左侧重新排序后,输出结果为(p2,p4,p1,p3)。
右侧重新排序后,输出结果为(p3,p1,p4,p2)。
2 代码脚本
2.1方法1
smallest_rectangle2(rt2, cur_Row, cur_Col, cur_Phi, cur_Len1, cur_Len2)
cur_Deg := deg(cur_Phi)
cur_Sgn := sgn(cur_Deg)
oft_AbsDeg := 90 - abs(cur_Deg) //与垂直方向的绝对角度差
oft_AbsRad := rad(oft_AbsDeg)
norm1 := [cos(oft_AbsRad), -cur_Sgn*sin(oft_AbsRad)]
norm2 := [cur_Sgn*sin(oft_AbsRad), cos(oft_AbsRad)]
LM_Row := cur_Row - norm2[0]*cur_Len2
LM_Col := cur_Col - norm2[1]*cur_Len2
LT_Row := LM_Row - norm1[0]*cur_Len1
LT_Col := LM_Col - norm1[1]*cur_Len1
LD_Row := LM_Row + norm1[0]*cur_Len1
LD_Col := LM_Col + norm1[1]*cur_Len1
RT_Row := LT_Row + norm2[0]*cur_Len2*2
RT_Col := LT_Col + norm2[1]*cur_Len2*2
RD_Row := LD_Row + norm2[0]*cur_Len2*2
RD_Col := LD_Col + norm2[1]*cur_Len2*2
* TM_Row := LT_Row + norm2[0]*cur_Len2
* TM_Col := LT_Col + norm2[1]*cur_Len2
* DM_Row := LD_Row + norm2[0]*cur_Len2
* DM_Col := LD_Col + norm2[1]*cur_Len2
* gen_cross_contour_xld(Cross_LM, LM_Row, LM_Col, 50, cur_Phi)
gen_cross_contour_xld(Cross_LT, LT_Row, LT_Col, 50, cur_Phi)
gen_cross_contour_xld(Cross_LD, LD_Row, LD_Col, 50, cur_Phi)
gen_cross_contour_xld(Cross_RT, RT_Row, RT_Col, 50, cur_Phi)
gen_cross_contour_xld(Cross_RD, RD_Row, RD_Col, 50, cur_Phi)
* gen_cross_contour_xld(Cross_DM, DM_Row, DM_Col, 50, cur_Phi)
* gen_cross_contour_xld(Cross_TM, TM_Row, TM_Col, 50, cur_Phi)
rows := [LT_Row, RT_Row, LD_Row, RD_Row]
cols := [LT_Col, RT_Col, RD_Col, RD_Col]
stop()
return ()
2.2方法2
smallest_rectangle2(rt2, cur_Row, cur_Col, cur_Phi, cur_Len1, cur_Len2)
cur_Deg := deg(cur_Phi)
cur_Sgn := sgn(cur_Deg)
oft_AbsDeg := 90 - abs(cur_Deg) //与垂直方向的绝对角度差
oft_AbsRad := rad(oft_AbsDeg)
gen_rectangle2(rt1, cur_Row, cur_Col, 0, cur_Len1, cur_Len2)
rt1_Rows := [cur_Row - cur_Len2, cur_Row - cur_Len2, cur_Row + cur_Len2, cur_Row + cur_Len2]
rt1_Cols := [cur_Col - cur_Len1, cur_Col + cur_Len1, cur_Col - cur_Len1, cur_Col + cur_Len1]
hom_mat2d_identity(hom2d_I)
hom_mat2d_rotate(hom2d_I, cur_Phi, cur_Row, cur_Col, hom2d_rot)
affine_trans_point_2d(hom2d_rot, rt1_Rows, rt1_Cols, rt2_rows, rt2_cols)
* gen_cross_contour_xld(Cross_LT0, rt1_Rows[0], rt1_Cols[0], 50, 0)
* gen_cross_contour_xld(Cross_RT0, rt1_Rows[1], rt1_Cols[1], 50, 0)
* gen_cross_contour_xld(Cross_LD0, rt1_Rows[2], rt1_Cols[2], 50, 0)
* gen_cross_contour_xld(Cross_RD0, rt1_Rows[3], rt1_Cols[3], 50, 0)
Ids := [1,3,0,2]
if (cur_Deg < 0)
Ids := [2,0,3,1]
endif
rows := rt2_rows[Ids]
cols := rt2_cols[Ids]
* gen_cross_contour_xld(Cross1, rows[0], cols[0], 50, cur_Phi)
* gen_cross_contour_xld(Cross2, rows[1], cols[1], 50, cur_Phi)
* gen_cross_contour_xld(Cross3, rows[2], cols[2], 50, cur_Phi)
* gen_cross_contour_xld(Cross4, rows[3], cols[3], 50, cur_Phi)
2.3方法调用
* get_rect2_corners1 (rt2_0, rows1, cols)
get_rect2_corners2 (rt2_0, rows, cols1)
读者可将上述两个方法封装为halcon函数,如上述代码所示进行调用。
3 输出结果
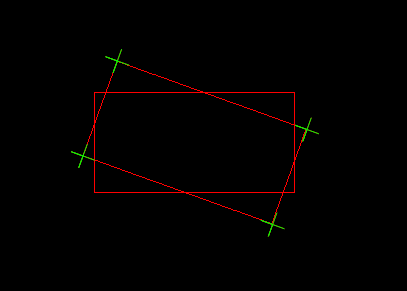
结果如上图所示,可见倾斜矩形各角点位置已经正确获得。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









