



人们的控制感知如何依赖于机器人执行任务的关键性
摘要
机器人伴侣正变得越来越普遍,人们也日益熟悉谷歌家庭助手、阿莱莎或佩珀等设备,但人们必须思考:控制这些设备的最佳方式是什么?本文探讨了人们对机器人伴侣的直接控制意愿程度,以及这种意愿在多大程度上取决于机器人所执行任务的关键性。本研究在赫特福德大学机器人屋开展了一项实地实验,由一台机器人伴侣执行四种不同类型的任务。这四项任务分别是:预约医生、协助用户搭建乐高人物、与用户一起跳舞,以及为用户搬运饼干。这些任务的选择基于我们先前的研究,旨在区分关键性较高和较低的任务类型。本研究的主要目标是确定参与者希望对他们的机器人拥有何种程度的直接控制,并探究这种控制需求是否依赖于机器人所执行任务的关键性。共有五十名参与者加入了本研究,每人按随机顺序体验了所有四项任务。总体而言,研究发现当机器人以半自主模式执行任务时,参与者的控制感知更高。然而,在“搬运饼干”这项任务中,尽管参与者在机器人以半自主模式执行任务时感觉更有控制感,但他们实际上更倾向于让机器人以自动模式完成该任务(此时他们的控制感较低)。结果还显示,对于被视为四项任务中关键性最高的“预约医生”任务,参与者并不希望由机器人来选择预约时间,因为他们感到自己被婴儿化了。
关键词 :任务关键性, 控制感知, 机器人伴侣
1 引言
第一款商业家用机器人之一是iRobot公司推出的扫地机器人Roomba [1]。尽管这款机器人只能执行单一任务,主要功能是吸尘清洁房屋,但研究人员发现,用户在使用一段时间后,往往会以对待宠物的方式对机器人产生感情[2]。一些公司利用这一发现巧妙地推广其产品。例如,莫林克斯公司在2018年将其推出的烹饪机器人系列产品命名为“烹饪机器人伴侣”[3]。其他公司则迫切希望推出具备一定智能的家用机器人伴侣,这些机器人具备面部或语音识别功能、摄像头,或拥有能够教你瑜伽的高级人工智能。例如优必选公司的Lynx机器人[4]。尽管这些设备在技术上具有创新性,但在实时语音和手势识别,以及根据主人生活习惯管理家庭的人工智能实现等方面仍存在技术局限。然而,这些局限和挑战很可能在不久的将来得到解决。因此,研究人员推测,拥有此类机器人在伦理上是可以接受的[5–7]。贝尔诺塔和艾塞尔[8]指出,人们对机器人的焦虑源于这些尚未解答的伦理问题,尤其是流行文化有时以最糟糕的方式描绘这些问题。
20世纪90年代后期,施奈德曼和梅斯 [9]研究了控制计算机的最佳方式。后来事实证明,鼠标成为了流行的工具向智能体 [10]。随着机器人技术的发展,如何控制机器人系统的问题亟待提出。一些先前的心理学研究将焦虑与控制感知 [11] 联系起来。基于此以及在人机交互(HCI)领域关于用户控制的先前研究,我们开展了一项初步的实地研究 [12],结果表明人们对机器人的焦虑与控制感知之间存在关联。然而,该先前的研究中机器人仅执行了一项任务。本文进一步尝试理解,根据机器人执行的任务类型不同,人们希望对机器人拥有何种控制水平。人们是否已准备好接受能够代表他们做出决策的机器人?
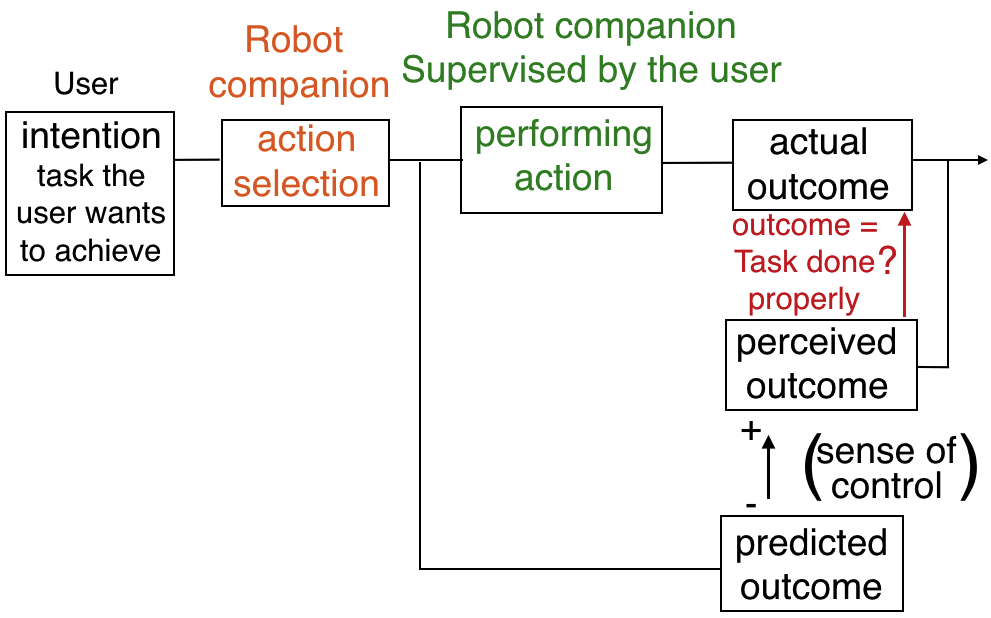
本文研究了人们对机器人伴侣的控制感知,通过测量人们认为机器人正确执行任务所需的监督程度(图1),或根据机器人执行的任务,参与者感觉自己需要对机器人保持多大程度的控制。控制感知是一个难以研究的主题,因为必须清楚地阐明我们所研究的内容。基于 Haggard和Chambon的控制感示意图[13],,我们对其进行了调整并简化,以适用于当前的研究(见图1)。当我们考虑一个动作时,会涉及三个步骤:我们期望的结果是什么,需要执行什么动作为实现该结果,以及如何正确执行该动作。图1展示了这一点。为了获得准确的测量结果,本研究在一个条件下让用户对机器人进行监督,在另一条件下让机器人在没有监督的情况下执行动作。

因此,对机器人伴侣的控制感知是通过机器人的自主级别来进行测量的。
在我们之前的一项研究[12],中,我们探讨了当机器人伴侣需要通过清洁机器人执行清洁任务时,用户对机器人伴侣的首选自主水平。因此,根据不同的条件,机器人伴侣会直接激活清洁机器人(无论是否需要用户的确认),或者让用户去激活清洁机器人。我们发现,人们更偏好自动化程度更高的机器人伴侣,即在不需要用户确认的情况下,机器人伴侣直接激活清洁机器人。结果还显示,一个人的控制欲越强,就越倾向于拥有一个更具自主性的机器人。需要注意的是,这里的“自主”是指机器人能够自主做出决策。为了进一步验证这些结果,我们决定开展本次实验,涵盖四种不同类型的任务。这些任务的选择基于之前一项问卷调查研究[14]的结果,该研究调查了被归类为主要属于“物理的”或“认知的”的任务中,哪些被认为是“高关键性”或“低关键性”的。
我们决定使用两项高关键性任务,一项物理任务(搬运饼干)和一项认知任务(预约医生),以及两项低关键性任务,一项物理任务(跳舞)和一项认知任务(搭建乐高人物),以平衡本次现场实验中的任务类型。因此,本文将研究用户对机器人的首选控制水平如何随机器人所执行任务的关键性而变化。
所选任务还在我们目前的实地研究中进行了评估,以验证问卷调查研究的结果。我们试图选择那些能够反映人们在日常生活中可能希望完成的任务。其中一项任务与谷歌最近推出的产品谷歌Duplex密切相关。谷歌Duplex是一种具备人工智能的代理,能够以语音方式与人交流[15]。本实验并未直接测试谷歌Duplex,但实验中使用的机器人能够以自动化方式预约,这正是谷歌产品在其宣传视频中展示的能力。其他任务则是典型的日常任务,例如帮助搬运物品(在此情境下为搬运饼干),或娱乐性任务,例如搭建乐高或跳舞。
2 背景研究
2.1 我们如何研究控制感?
为了能够研究控制感知,理解控制点的含义非常重要。莱福库特提出了相关理论。
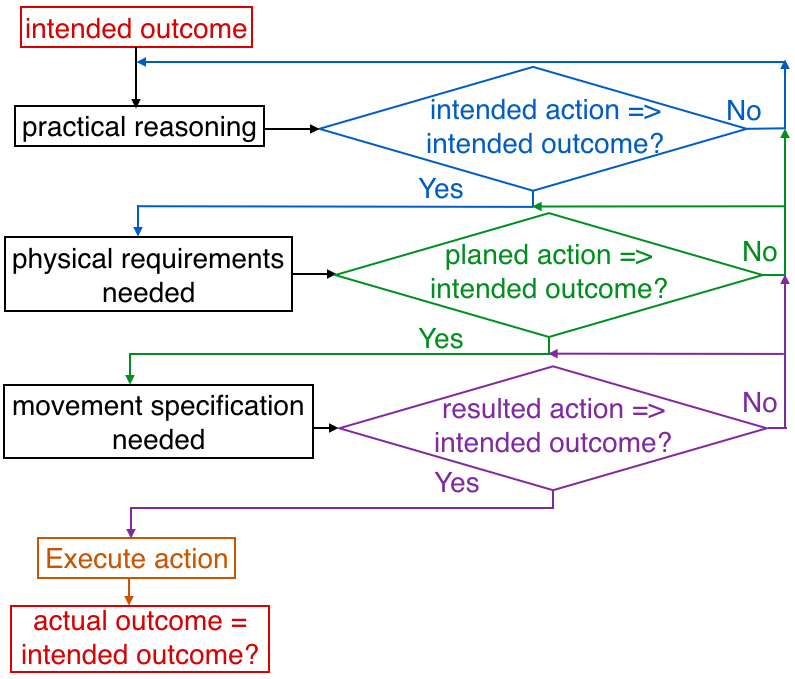
通过解释控制点是指人们相信自己能在多大程度上影响动作与结果之间的关系 [17]。帕什里 [16] 解释说,在执行一个动作之前,我们有三种类型的意图:实现预期动作的实践推理(心理努力)、使动作成为可能的物理要求(物理努力),以及执行动作所需的运动规范。为了说明帕什里的理论,我们在图2中绘制了她关于动作规范的简化示意图。哈格德和查姆邦研究了控制感的生物模式,即控制感知的神经学机制 [13]。他们将控制感定义为对结果的感知与预期结果之间的差异。因此,要研究由机器人执行的动作的控制感知,首先需要确定该机器人所执行动作的预期结果。另一种研究控制感知的方法,正如帕什里所提到的 [16],是识别机器人执行动作的预期方式。因此,研究控制感知有两种方法:一是检查动作的结果,看其是否符合用户的预期;二是验证机器人执行动作的方式是否符合用户对其执行方式的预期。在我们目前的研究中,我们决定关注后者。

2.2 关键性高的任务与关键性低的任务有何区别?
扬科和德鲁里是首次尝试为人机交互(HRI)[18]中的关键性提供明确定义的研究人员。他们将关键性定义为“任务正确完成的重要性,以出现问题时可能产生的负面影响来衡量”,并将关键任务定义为“失败会影响人类生命”的任务。正如察费斯塔斯后来发展[19],的那样,我们可以区分三种关键性级别:高、中和低。然而,他们均未说明如何量化失败,也未说明如何衡量其对人类生命的影响。吉奥谢、马钦和瓦泽林克[20]研究了安全关键型机器人。他们主要关注工业与先进机器人(具有决策自主性且处于非结构化工作环境中的机器人),并详细阐述了评估任务的步骤。他们考察了任务复杂性、其功能以及可应用的安全规则类型。然而,在考虑家庭伴侣时,一些看似简单的家务任务(如熨烫)已被证明执行起来很复杂[21],,正如戴、泰-洛尔、刘和林在他们的论文中充分解释了这一点。埃泽尔、菲斯克、罗杰斯和温迪[22]开展了一项关于机器人执行家务任务的问卷调查研究。他们根据参与者感知到的任务收益程度来定义任务的关键性。因此,高关键性任务与紧急任务相关,而低关键性任务则与娱乐性相关。
然而,他们并未要求参与者确认其对关键性的评分。因此,我们开展了先前的研究以探讨任务关键性[14],,旨在识别用户认为的高关键性或低关键性任务。我们发现,与娱乐相关的任务通常被评定为低关键性,除非该机器人专门用于此目的。正如我们的用户所强调的,如果机器人主要设计用于执行某一项特定任务,他们会认为该任务具有高关键性。例如,对于扫地机器人Roomba而言,清洁就是一项高关键性任务。我们先前的研究表明,人们普遍认为高关键性的任务是那些一旦出错可能会产生不可逆影响或难以更改的任务(例如,煮饭时水量错误导致米饭过熟变成粥)。
因此,我们决定从问卷调查研究的结果中选取四个任务来进行本次实地调查。为了使任务具有多样性,我们选择了两个被评定为高关键性的任务和两个被评定为低关键性的任务。本文中使用的关键性定义源自先前关于任务关键性的一项研究[14]。如上所述,由于参与者难以理解这一概念,我们提供了一些关于任务的陈述供他们评分。因此,关键性可以定义为”其重要性
2.3 任务关键性定义
importance of a task being carried out safely, correctly and with attention to detail。为了提供良好的任务多样性,还根据参与者在我们先前关于任务关键性研究中的评分,选择了两个认知任务和两个物理任务[14]。认知任务被定义为“任何需要心智活动或思维过程的任务,可能涉及一些决策”,而物理任务被定义为“任何需要身体运动或动作过程的任务,可能被认定为费力的任务”[14]。
我们选择了高关键性的任务,包括预约医生(认知的)和搬运饼干(物理的),并将其应用于我们的场景中。尽管搬运饼干看似不具有高关键性,但由于其不可逆性方面,参与者将其评定为高关键性。如果饼干掉到地上并破碎,就无法再供食用。当房主接待客人并计划提供茶和饼干时,这可能会成为一个问题。我们选择的低关键性任务包括搭建乐高人物(认知的),因为解谜被认为属于低关键性。我们决定将该任务修改为搭建乐高模型,以使任务与机器人之间的互动更加丰富。我们选择的第二个低关键性任务是跳舞(物理的),因为这是一项机器人可以执行的一项娱乐性任务,因此具有低关键性。
3 研究问题和假设
根据我们之前关于控制感知和机器人伴侣的研究以及相关文献,本文提出了以下研究问题和假设:
- R1 :参与者的控制欲望与他们对机器人自主级别的偏好之间是否存在关系?—— H1 :参与者越希望掌控,他们希望机器人具备的自主性就越低。这一假设源于早期关于控制感知与机器人伴侣的研究结果 [12]。
- R2 :参与者对机器人的控制感知与其对机器人自主级别的偏好之间是否存在关系?—— H2 :参与者感知到的对机器人控制程度越高,他们希望机器人具有的自主性就越低。该假设源自以下结果同一项上述关于控制感知和机器人伴侣的研究 [12]。
- R3 :机器人执行的任务的关键性水平(高或低)是否会影响参与者对机器人自主性水平的偏好?
- 假设3a :机器人执行的任务关键性越高,参与者越倾向于降低机器人的自主性。任务关键性评级越高,涉及的风险就越大。因此,可以假设任务关键性越高,参与者越倾向于控制机器人,即他们希望机器人越不自主。—— 假设 3b :参与者越是倾向于控制,他们对任务关键性的评级就越高。我们假设任务关键性越高,参与者就越不希望自主,因此参与者就越倾向于控制。也许参与者越是倾向于控制,他们对任务关键性的评级就越高。
- R4 :机器人执行的任务类型(物理的或认知的)与参与者对机器人自主级别的偏好之间是否存在关系? – H4 :参与者对机器人自主级别的偏好与机器人执行的任务类型无关。文献中没有证据表明机器人的自主级别与其执行的任务类型之间存在关联,因此该假设基于这两个变量相互独立。
- R5 :参与者的技术熟练度(技术方面的经验和知识)是否会影响其对机器人自主级别的偏好? – H5 :参与者对机器人自主级别的偏好与其技术方面的经验和知识无关。我们关于控制感知的首次研究的结果[12]表明,技术意识与参与者对机器人的自主级别的偏好无关。
4 方法
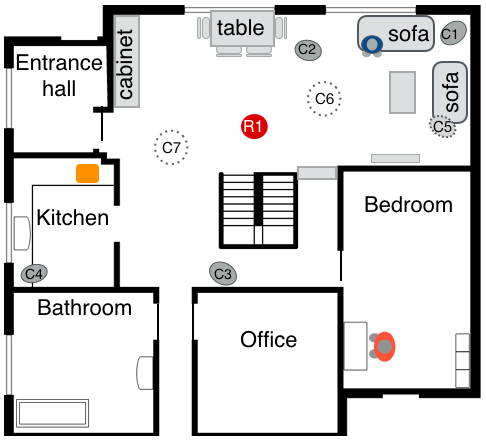
为了研究任务关键性如何影响参与者对机器人伴侣自主级别的选择,我们在机器人之家(图3)进行了一项实地研究。
这座房屋是赫特福德大学拥有的典型英国家庭住宅,已被改造为智能房屋,旨在真实的家庭环境中开展人机交互(HRI)研究。实验中我们使用了一款名为向日葵的移动机器人(图4)。如引言所述,我们此前曾开展过一项关于控制感知的实地研究[12],,其中对控制水平的测量被假定为对应于机器人的自主水平。此处的自主性指的是决策。为了保持一致性,本研究采用了相同类型的测量方法,由此形成了两种条件:一种是机器人在执行动作时由用户进行监督,另一种是机器人在无用户监督的情况下执行动作。
4.1 实验设计
为了研究任务关键性的影响,实验中精心选择了四项任务:关键性较低的认知任务T1、关键性较高的认知任务T2、关键性较低的物理任务T3以及关键性较高的物理任务T4。这些任务在我们之前的问卷调查研究[14]中已进行分类和预验证。每项任务包含两个条件:一种是机器人自主决定如何执行动作,另一种是由参与者引导机器人执行动作。实验使用向日葵机器人(见图4)完成任务,该机器人是定制的,具有Pioneer DX机器人底盘、头部和托盘。实验中,机器人的导航是自主的,但其平板电脑上的信息、托盘的动作以及机器人的舞蹈动作由实验员控制。
4.1.1 实验的任务和条件
- 任务1 “乐高” 认知任务 关键性低 :参与者希望在向日葵的帮助下构建一个乐高人物。
- C1 完全自主 :机器人自主决定何时展示乐高人物构建的下一步。机器人使用其平板电脑向参与者展示下一步,以提供帮助。一旦机器人检测到参与者已完成当前步骤,便会立即显示下一步。
-
C2 半自主 :参与者决定何时在机器人的平板电脑上查看如何搭建乐高人物的下一步。
-
任务2 “医生” 认知任务 关键性高 :参与者接下来几天需要进行血液检测。向日葵提醒参与者并提供预约就诊服务。
- C1 完全自主 :机器人在检查日程表后,自行决定为医生预约安排哪个预约时间段。随后机器人确认将在预约当天提前2小时发送通知。隐含的意思是机器人会将该预约添加到电子日程表中。
-
C2 半自主 :机器人提供一些可用的预约时间段,参与者选择其偏好的时间段。机器人询问通知的发送时间,并提供选项。
-
T3 “舞蹈” 低关键性体力任务 :参与者与向日葵一起跳舞。为此,用户向机器人展示一个舞蹈动作。然后机器人向参与者展示一个舞蹈动作。此过程重复一次。
- C1 完全自主 :参与者做一个动作,而向日葵则做出另一个随机动作以表达创造性。例如,如果参与者向左转,机器人不会向自己的左侧移动,而是会迈步到另一个位置(例如,向前)。
-
C2 半自主 :参与者做一个动作,向日葵重复该动作(例如,如果参与者右转,向日葵也会右转)。所有移动都遵循相同的规则。
-
任务4 “饼干” 物理任务 关键性高 :参与者正在等待客人。向日葵希望帮助参与者将一些饼干拿到客厅招待客人。
- C1 完全自主 :一旦向日葵的托盘装好,机器人就会前往客厅。
- C2 半自主 :当参与者完成向日葵托盘的装载后,参与者通过发出简单的方向指令(前进、左转、右转、停止、已到达目的地)来提供语音指令,引导机器人前往客厅。
4.2 参与
实验采用被试内设计。每位参与者以半随机顺序(4x2)经历实验中的所有任务条件。实验持续时间为45分钟至2小时30分钟(针对最慢的参与者)。完成实验的平均时间为1小时15分钟。
五十名参与者(28名女性和22名男性)通过电子邮件广告和海报从赫特福德大学及其周边地区招募。他们被单独测试。每位参与者收到五英镑作为前往机器人之家的交通补偿。他们的年龄范围为19至80岁(平均值= 39.98,标准差= 14.88)。关于技术意识,每位参与者都提到拥有计算机(86%的人每天使用,14%的人每周使用)。百分之九十我们的参与者中,有百分之九十的人每天使用智能手机。其余百分之十的人没有智能手机。百分之十二的人每天与谷歌家庭助手或亚马逊Alexa进行交互。一项五点李克特量表问卷(1表示完全不熟悉,5表示非常熟悉)显示,我们的参与者对编程机器人大多不熟悉(中位数= 1,标准差= 1.06),在编程机器人方面经验较少(中位数= 1,标准差= 0.91),在与机器人交互方面的经验也较少(中位数= 1,标准差= 1.03)。百分之八十六的参与者从事以智力和认知为主的工作(例如办公室工作、IT顾问或讲师)。百分之八的参与者从事更多物理性的工作,例如高尔夫职业选手或公交车司机。其余参与者则表示已退休或为家庭主妇。
4.3 实验程序
4.3.1 问候环节
参与者被要求直接前往机器人之家参加实验。每位参与者都会受到正式欢迎,并受邀参观机器人之家。这使实验员能够介绍相关技术(机器人和传感器),并解释该场所的用途。在介绍之后,访客会收到一份信息表、一份知情同意书以及一个身份证号码(用于匿名化目的)。
在填写表格期间,会为他们提供热饮。随后,参与者需要完成一份问卷,收集人口统计学数据(年龄、性别、职业等)、技术经验以及对机器人的熟悉程度。接下来是大五人格测试[23],,该测试在人机交互研究中被广泛使用;以及控制欲求量表(DCS)问卷[24],该量表自20世纪80年代以来便应用于心理学研究,用以测量期望控制程度。这些问题有助于回答研究问题R1,因为期望控制水平由DCS进行测量,然后我们将此数据与人格测试数据进行交叉相关分析,以查看这些变量之间是否存在关联。关于技术熟练度的问卷将有助于回答研究问题R5,因为它允许对一些常用技术的使用频率与参与者对机器人自主级别的偏好进行交叉比较。
4.3.2 向日葵简介
向日葵随后被介绍给参与者,作为一款可以帮助人类的机器人伴侣。实验员说明,与机器人的互动主要发生在客厅和厨房。之后,参与者被要求坐在沙发上,并填写一组问题,用以评估他们对向日葵机器人的期望。这使得实验员能够为第一次互动会话准备机器人并开启摄像机。接着,向参与者展示四种情景之一,并告知该情景将连续发生两次。实验采用这种设计,以便在每种情景结束后,参与者能够立即比较两种条件(条件C1:向日葵机器人处于完全自主状态,或条件C2:机器人处于半自主状态)。因此,每位参与者将以半随机顺序体验每个任务(4×2)。随机化过程采用平衡对照设计,即一半参与者从第一个条件条件C1开始实验,另一半则从第二个条件条件C2开始。四分之一的参与者从任务1开始,四分之一从任务2开始,四分之一从任务3开始,四分之一从任务4开始。
4.3.3 交互阶段
机器人设置完成后,实验员告诉参与者,实验员一离开,他们就可以与机器人互动。
任务1 “你有一些空闲时间,想用机器人搭建一个乐高人物。”
- 条件1 向日葵机器人来到参与者面前,并在其屏幕上向参与者显示以下信息:“今天我们将一起搭建一个乐高人物。我将指导您完成整个过程。当您准备好了,请说‘准备好了’,我们就可以开始了。” 参与者必须点击或说出“准备好了”以启动该过程。然后,向日葵机器人打开其托盘,递送乐高零件,并开始在屏幕上显示如何搭建钢铁侠乐高人物的图片说明。一旦参与者完成第一步,机器人就会显示下一步。当乐高人物搭建完成后,实验员走出房间并对参与者说:“现在同样的情景将再次开始。” 实验员在机器人的托盘上提供了新的乐高零件。
- 条件2 相同的过程再次开始,只是这次机器人提到参与者必须说“下一个”以查看下一个指令页面。会话结束后,实验员走出房间,向参与者提供了一组问卷,其中包含关于他们对搭建乐高的控制感知、关键性和习惯化的问题,详见[25]。
任务2 “你刚从印度尼西亚旅行回来,接下来几天需要做一次血液检测来检查是否患有登革热。”
- 条件1 向日葵走到参与者面前,并在其屏幕上显示以下信息:“您需要尽快进行血液检测。让我检查一下您的日程表,看看您下次何时有空进行血液检测。我将与英国国家医疗服务体系确认您可以预约的时间。” 随后出现一条等待信息:“正在检查⋯⋯”。机器人接着说:“我已经为您找到了一个空闲时段,并已将其添加到您的数字日历中。我将在预约前一天晚上发送提醒,并在预约前2小时发送通知。” 实验员从房间走出来并说道:“谢谢。现在同样的情景将再次开始。”
- 条件2 向日葵来到参与者面前,显示以下消息:“您需要尽快进行血液检测。让我们查看一下您的日程表,看看您下次何时有空进行血液检测。我将与英国国家医疗服务体系确认他们何时有空余时间段。”但这次机器人以日历格式提供可用的时间段供用户选择:“我为您找到了这些时间段,请选择您偏好的一个。”一旦参与者做出选择,机器人会询问应何时发送预约提醒通知:“谢谢,您的预约已安排成功。我应在何时给您发送提醒?”机器人提供了多个选项。一旦参与者选择了某个选项,机器人便会说:“谢谢,您的选择已记录。”会话结束后,实验员从房间出来,向参与者提供了一组问卷。该问卷涉及对控制感、关键性以及数字日历[26]的看法。
任务3 “你想和向日葵机器人一起跳舞并展示一些动作。你将从下面的列表中选择2个动作,以任意顺序逐个展示。列表如下:向右移动、向左移动、向前移动、向后移动。你也可以大声说出来,以帮助机器人识别动作。”
- 条件1 向日葵来到沙发旁,邀请用户一起跳舞。机器人调整好位置,等待参与者开始。每次结束后参与者跳舞时,机器人会做出一个与参与者不同的随机动作。舞蹈结束后,实验员走出房间,说明同样的场景将再次开始。
- 条件2 同样的流程发生,只是机器人会重复参与者做的每个动作。完成两个舞步后,参与者会收到另一组问卷,其中包含关于他们的控制感知、关键性和娱乐性的问题 [27]。
任务4 “你即将有客人到家庭做客。你需要向日葵帮忙将饼干从厨房搬到客厅。”
- 条件1 与每个场景一样,参与者坐在沙发上,机器人向他们走来。向日葵提醒用户将有客人到来:“您好,您即将接待客人,让我帮您从厨房拿些饼干到客厅吧。我们去厨房吧。”然后机器人和参与者一起前往厨房。到达厨房后,向日葵打开它的托盘:“我的托盘已打开,请把一盒饼干放进去。”一旦参与者将一盒饼干放入机器人的托盘(厨房里陈列着三盒饼干),向日葵便前往客厅。到达客厅后,机器人请求卸下托盘上的物品:“请把饼干盒从我的托盘上拿下来。”完成后,它显示了一条感谢信息:“希望我帮上了忙,很高兴能为您效劳 :)” 随后实验员进入房间并重置该场景。
- 条件2 向参与者提供了以下情景:“您即将有客人到家中来访。您需要向日葵机器人协助将饼干从厨房搬运到客厅。为了引导向日葵机器人,您可以发出以下指令:前进、停止、左转、右转、已到达目的地。” 相同的流程再次开始,但一旦机器人到达厨房,它会提醒参与者需要被引导返回:“请使用以下指令引导我:前进、停止、左转、右转、已到达目的地。” 然后参与者说出一个指令,机器人做出响应。一旦到达客厅,机器人会显示另一条感谢信息。随后,实验员提供另一份问卷,包含关于控制感知和关键性的问题 [28]。
4.3.4 最后一份问卷与奖励
交互阶段结束后,用户会收到最后一组问卷,用于了解其对每项任务重要性的看法,并收集有关整体交互体验的一些信息。随后,参与者可选择与向日葵机器人一起拍摄一张“自拍”,机器人会显示一条个性化消息:“Hello name,很高兴认识你 :)”,并提供5英镑作为交通补偿。
4.4 统计分析
由于本次实验收集了大量数据,数据分析按以下顺序系统地进行: – 对数据集进行了描述性分析,以评估其总体趋势。 – 应用柯尔莫哥洛夫‐斯米尔诺夫正态性检验,以确定可进行的类型的相关性检验。 – 待呈现的数据集为非参数类型,因此采用肯德尔τ相关性检验。 – 当由于分类命名数据导致无法使用相关性检验时,采用皮尔逊卡方检验来测量关联性。
本研究选择了相关性检验,因为我们希望量化变量之间的关联,而不是比较组间差异。
5 结果
5.1 每个任务的首选条件
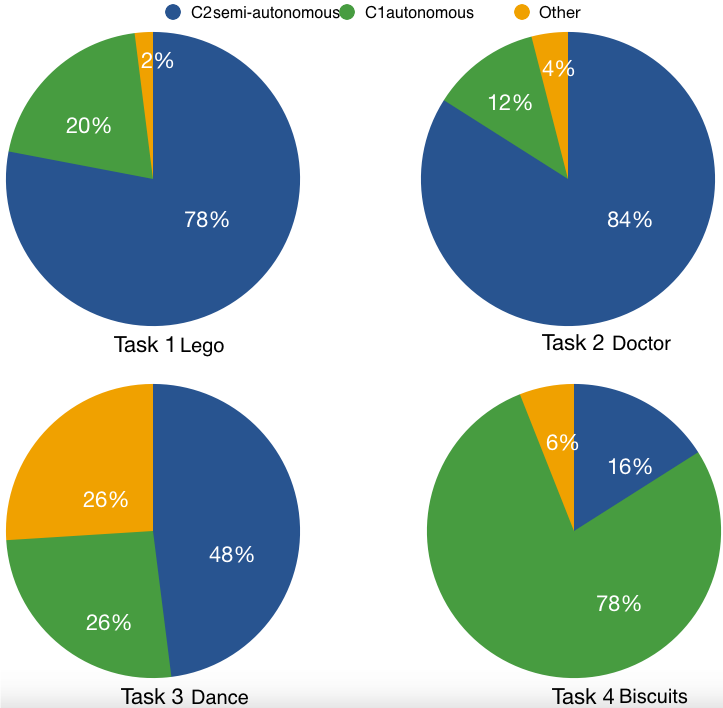
为了评估人们在各项任务中更偏爱哪种条件,参与者回答了一份多项选择问卷,并需提供选择的理由。如饼图图5所示,在用户告诉向日葵如何执行任务的情况下,半自主状态明显更受青睐;这包括任务1(搭建乐高模型)、任务2(预约医生)和任务3(跳舞)。需要注意的是,在任务3中,选择半自主模式C2的参与者未过半数。有16%的参与者偏好任务4中的自主模式C1,因为他们“保留了控制权”,一名参与者甚至表示他“想把饼干放在另一张桌子上,而不是[他]原本坐的位置”,另有6%的参与者认为同时拥有两种选项有助于“测试向日葵在C2条件下的可靠性”。

在完全采用之前,参与者处于半自主状态。大多数参与者(78%)更喜欢任务4的条件C2半自主状态。
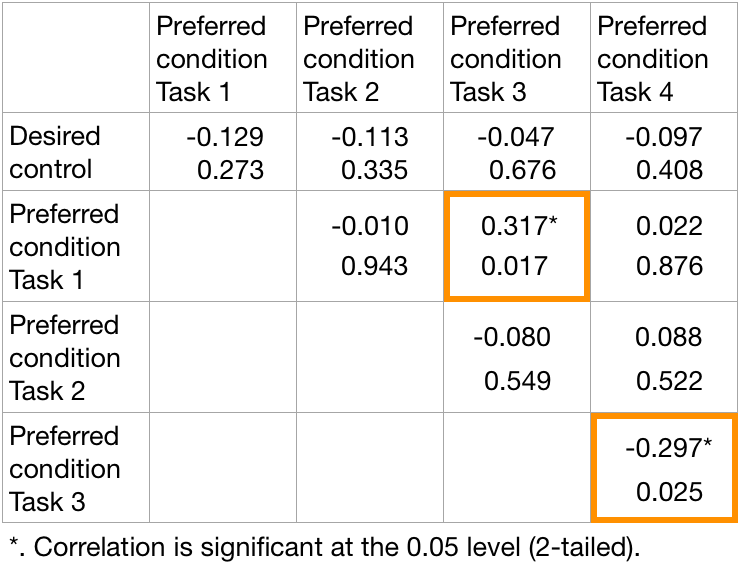
肯德尔τ相关性检验显示,控制欲强的人与他们在每项任务中的首选条件之间没有相关性。然而,任务1的首选条件与任务3的首选条件之间存在显著的正相关( τb= 0.317,p= 0.017)。因此,参与者在任务1中越倾向于控制机器人,在任务3中也越倾向于控制机器人。任务3的首选条件与任务4的首选条件之间存在显著的负相关(τb= −0.297,p= 0.025)。因此,人们越倾向于在任务3中控制机器人,在任务4中就越希望机器人具有自主性。这表明在关键性较低的任务上,人们对条件的偏好具有一致性。
总之,似乎参与者更倾向于对机器人进行控制,除非这样做对于要完成的任务效率较低。
5.2 R1. 个性效应
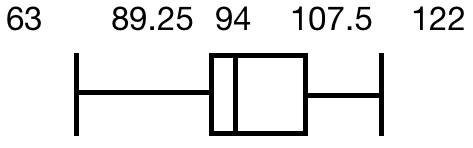
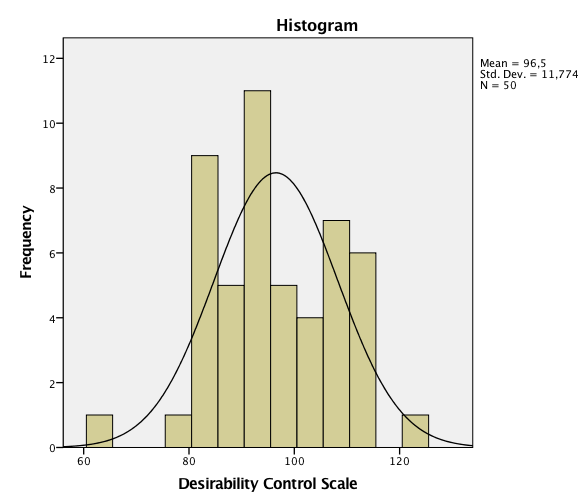
为了衡量人们控制欲的强弱,我们使用了DSC [29]。该测试通过日常生活中的问题来研究人们总体上希望在多大程度上掌控局面。柯尔莫哥洛夫‐斯米尔诺夫正态性检验表明,在控制欲方面,我们的样本人群符合正态分布 (D(50) = 0.104,p= 0.200),这一点在箱线图图7 和直方图图8中有所体现。直方图显示,尽管本次实验的参与者数量对于一项人机交互实地研究而言是充足的 (N= 50),但图形明显表明数据并未呈现理想的正态分布。这意味着所有后续使用的统计检验均为非参数的,因此不足以得出确定性的结论。然而,这些结果仍为我们提供了有关人们偏好如何控制其机器人的趋势的宝贵信息。
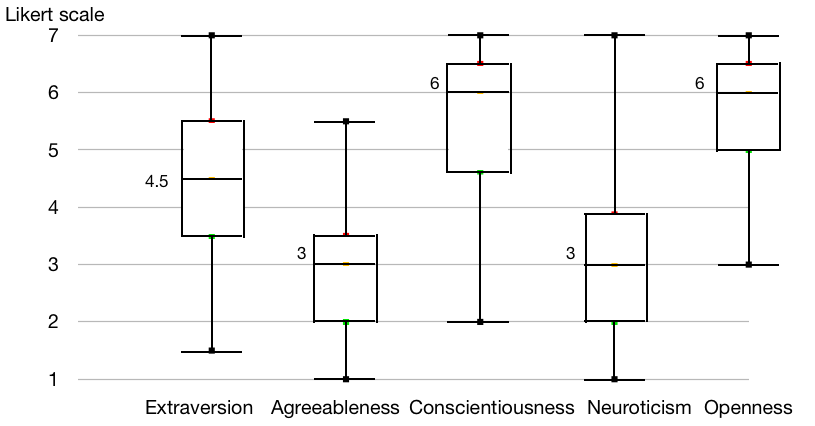
为了测量参与者的个性,要求他们完成标准的大五人格测试[23]。该测试采用七点李克特量表,用于测量外向性、宜人性、尽责性、神经质(有时称为情绪稳定性)以及开放性。结果显示,我们的参与者具有较高的开放性,中位数得分为6(SD= 1.41),且具有较高的尽责性,中位数得分为6(SD= 1.22)。神经质的中位数得分较高,为6(SD= 1.51),而宜人性和外向性的中位数得分较低(分别为3,SD= 1.22 和 4.5,SD= 0.92)。正如图9中人格测试的箱线图所示,我们的参与者群体并不代表一个正态分布。柯尔莫哥洛夫‐斯米尔诺夫正态性检验证实,宜人性(D(50) = 0.144,p= 0.011)、尽责性(D(50) = 0.220,p< 0.001)、神经质(D(50) = 0.126,p= 0.045)和开放性( D(50) =0.155,p= 0.004)均不符合正态分布。因此决定采用非参数相关性检验。肯德尔τ相关性检验表明,人越开放,其控制倾向越强,开放性与期望控制量表之间存在显著的正相关关系(τb= 0.254,p= 0.016)。
开放性与参与者在任务1(搭建乐高人物)中的首选条件之间存在高度显著的负相关(τb= −0.323,p= 0.009)。这意味着,参与者越具有开放性,他们越不倾向于选择半自主版本的机器人(即当向日葵在需要时才向用户展示搭建乐高人物的下一步操作指南),因此更愿意选择完全自主版本的机器人(即由向日葵自主决定何时向用户展示下一步操作指南)。对于其他任务,开放性与参与者在任务2中的首选条件之间无统计学上的显著相关性(τb= −0.126,p= 0.309),开放性与参与者在任务中的首选条件之间也无显著相关性。
任务3的条件与参与者(τb= −0.177,p=0.138),以及开放性与任务4参与者首选的条件(τb= −0.26,p= 0.832)。
肯德尔相关性检验显示,人格特质与参与者在任务1的首选条件下的控制感知之间不存在具有统计学意义的相关性。然而,在任务2中,Desirability Control量表评分与向日葵机器人在医生预约被安排时的控制感知之间存在具有统计学意义的负相关(τb= 0.274,p= 0.014)。因此,参与者控制欲越强,在医生预约被安排时就越感觉对机器人缺乏控制。在任务3和4中,人格特质与用户首选条件下的控制感知之间没有显著相关性。因此,无法就控制欲强的人希望机器人具备多大自主性做出普遍性结论。
5.3 R2. 机器人伴侣的控制感知
参与者被要求在1到5的量表上进行评分(1表示“我完全感觉不到控制”,5表示“我感觉完全处于控制之中”),评估他们在两种条件(C1:机器人决定下一步做什么; C2:参与者决定机器人下一步做什么)下,对动作的控制感、对动作结果的控制感以及对机器人控制感的程度。
首先,正如预期的那样,结果显示,当参与者决定机器人每个任务应执行什么操作时,他们感受到的控制感更强(参见任务1的图10、任务2的图12、任务3的图14和任务4的图16)。该结果在各个任务中保持一致。当用户感觉无法控制动作时,他们同样也感觉无法控制机器人 (例如参见任务1的图10)。
5.3.1 任务1: Building a Lego Character
结果表明,在任务1“乐高”中,与C1自主状态相比,参与者平均更倾向于选择C2半自主状态:当用户请求后机器人显示以下指令时,78%的参与者更偏好C2半自主状态;而当机器人自主决定何时显示以下指令时,仅有20 %的参与者选择C1自主状态作为其首选。另有2%的参与者未决定。
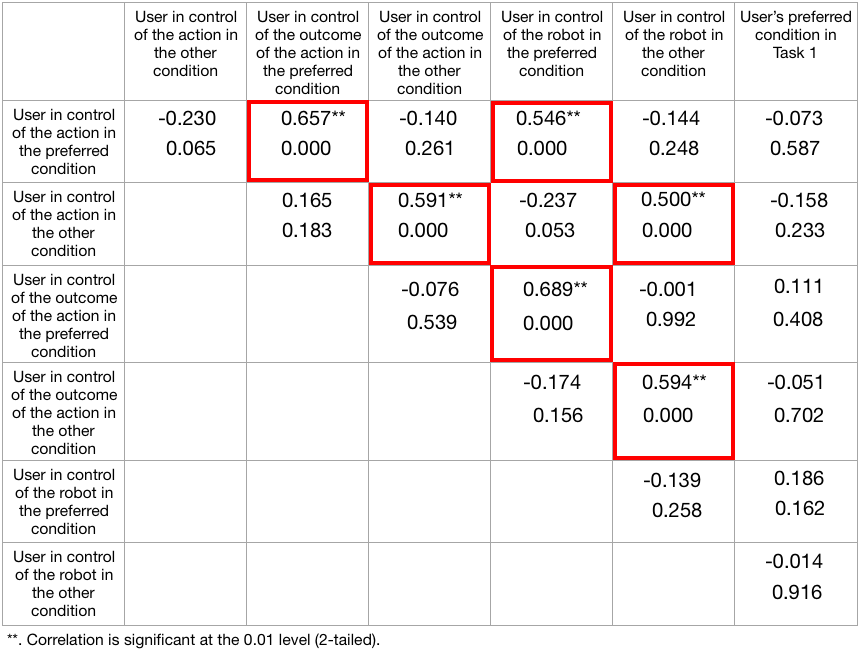
肯德尔τ相关性检验 图11 显示,在两种条件下,对动作的控制感知与对动作结果的控制感知之间均存在统计学上高度显著的正相关(首选条件 τb= 0.657,p< 0.001;另一条件 τb= 0.591,p<0.001)。此外,在两种条件下,对动作结果的控制感知与对机器人的控制感知之间也存在高度显著的正相关(首选条件 τb= 0.689,p< 0.001;另一条件 τb= 0.594,p<0.001)。
这意味着,用户在构建乐高人物这一动作中感受到的控制感越强,他们对动作结果(即成功构建一个乐高人物)的控制感以及对机器人的控制感也越强。这一结论在用户的首选条件和非偏好的条件下均成立,表明 任务1 的结果具有一致性。
5.3.2 任务2:预约医生
对于任务2,描述性统计图12显示,与任务1乐高(图10)相比,条件C1(机器人完全自主)和条件C2(机器人半自主)在控制感知上的差异更加明显。在C1条件下,当机器人为其用户选择医生预约的时间段时,参与者显然完全感受不到控制感。在该任务2中,84%的参与者更倾向于C2半自主状态,即由自己决定医生预约的时间段; 12%的参与者更偏好C1条件,即由机器人选择时间段; 4%的参与者未决定。
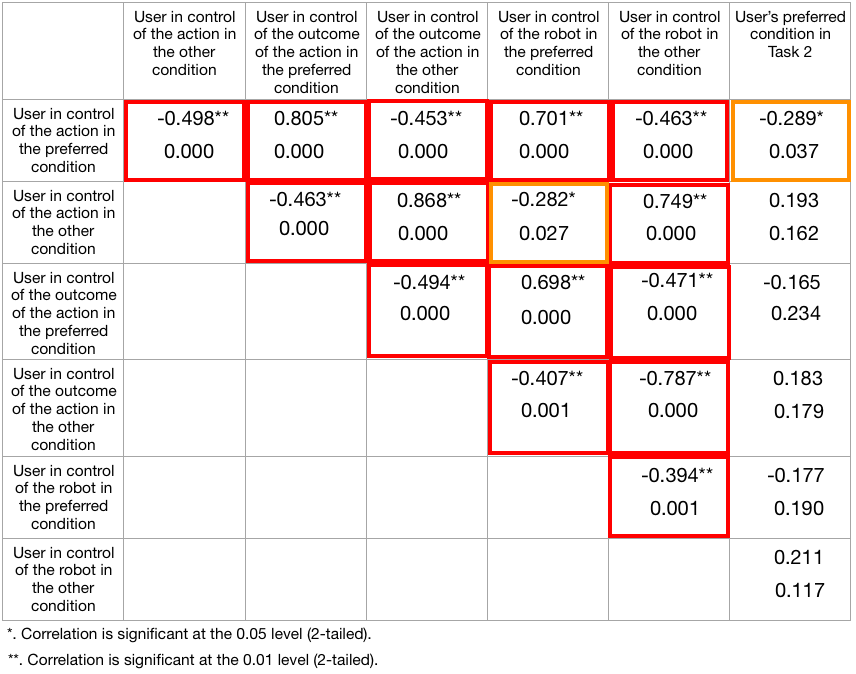
肯德尔 tau 相关性 图13 检验揭示了与 任务1 相同的一致性:在两种 条件 下,对 动作 的 控制感知 与对 动作结果 的 控制感知 之间均存在统计学上的 强正相关 (对于 首选条件 τb= 0.805,p< 0.001,另一种 条件 τb= 0.701,p< 0.001)。此外,在 首选条件 下对 动作 的 控制感知 与另一种 条件 下对 动作 的 控制感知 之间也存在显著的 强负相关(τb= −0.498,p< 0.001)。
这意味着, 参与者 感知到自己对“预约医生”这一 动作 的 控制 越强,其对结果(医生预约已安排)的 控制感 就越强;并且在 首选条件 下,参与者对 机器人 的 控制感知 也越强,而这种情况主要出现在 C2 半自主 条件下 (见 图12);这也意味着 用户 在其 首选条件 下对 动作 的 控制感 越强,其在另一条件下对 动作 的 控制感 就越弱。
5.3.3 任务3:跳舞
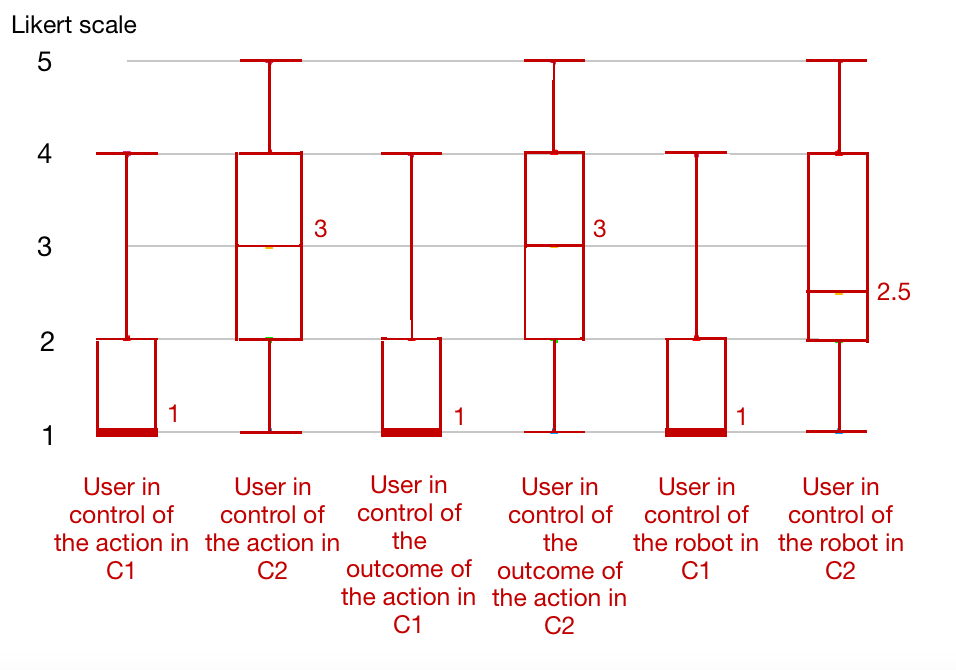
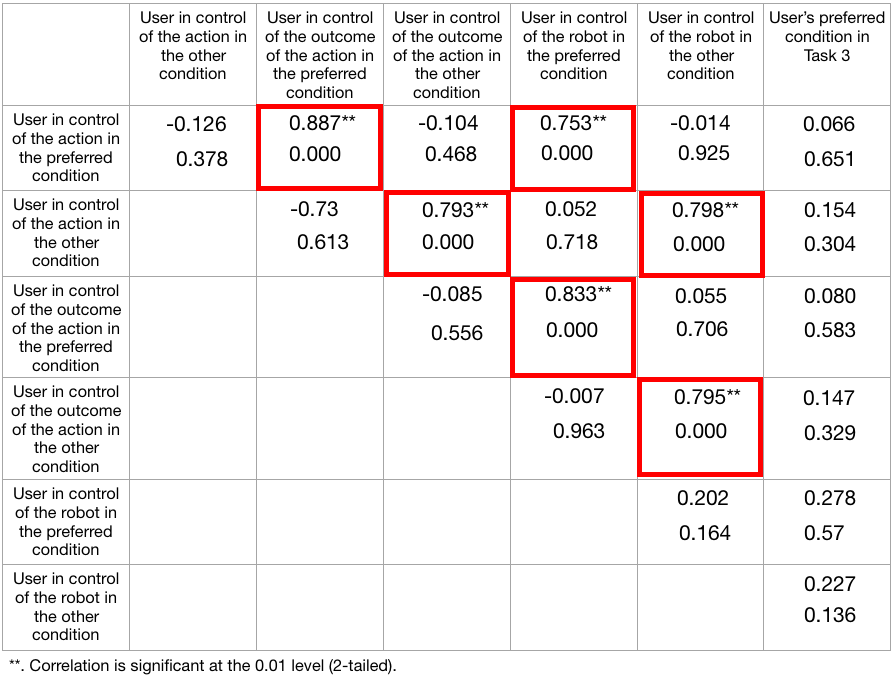
任务3的描述性统计结果(图14)在C1完全自主条件与C2半自主条件之间的差异上,相较于任务1和任务2更为不明显。然而,结果仍然显示,人们在C2半自主状态下比在C1完全自主条件下感受到更强的控制感。当机器人重复用户的舞蹈动作时,48%的参与者更偏好C2条件; 而当机器人执行不可预测的舞蹈动作时,26%的用户更偏好C1条件,另有26%的用户不确定自己的偏好。肯德尔τ相关性检验(图15)显示出与任务1相同的统计显著相关性。在两种条件下,对“跳舞”这一动作的控制感与对动作结果(完成的舞蹈)的控制感之间均存在高度显著的正相关关系(对于首选条件 τb= 0.887,p< 0.001,对于另一条件 τb= 0.793,p< 0.001)。我们在任务3的相关性结果中发现了与任务1一致的模式。
因此,在首选条件下,用户感知到对“跳舞”这一动作的控制程度越高,其对动作结果(完成的舞蹈)的控制感就越强,同时对机器人的控制感也越强。在另一条件下也得到了相同的结果。
5.3.4 任务4:搬运饼干
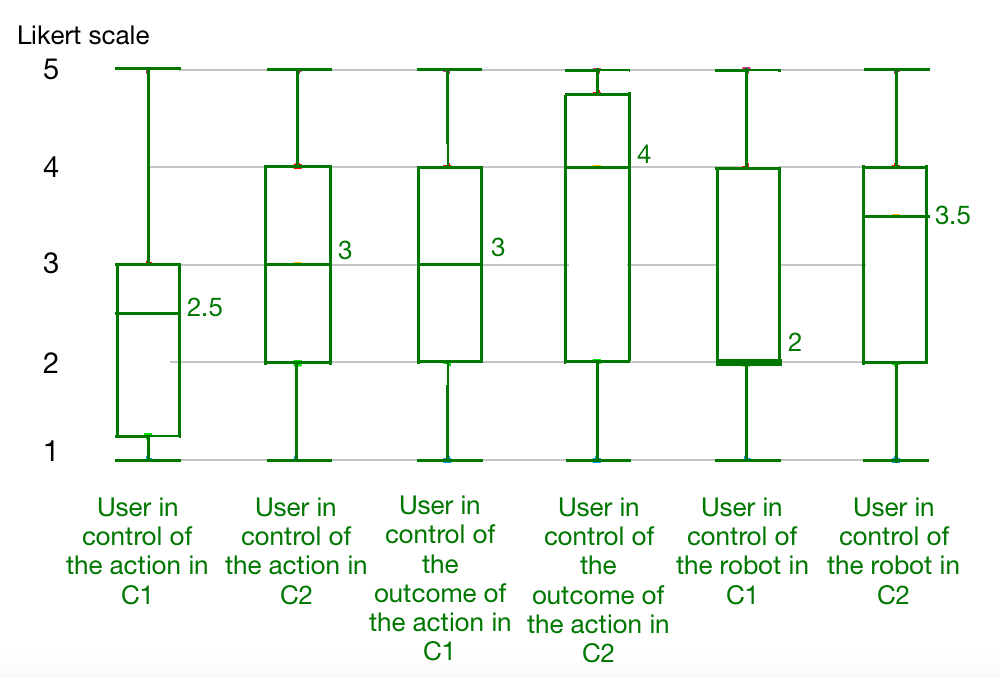
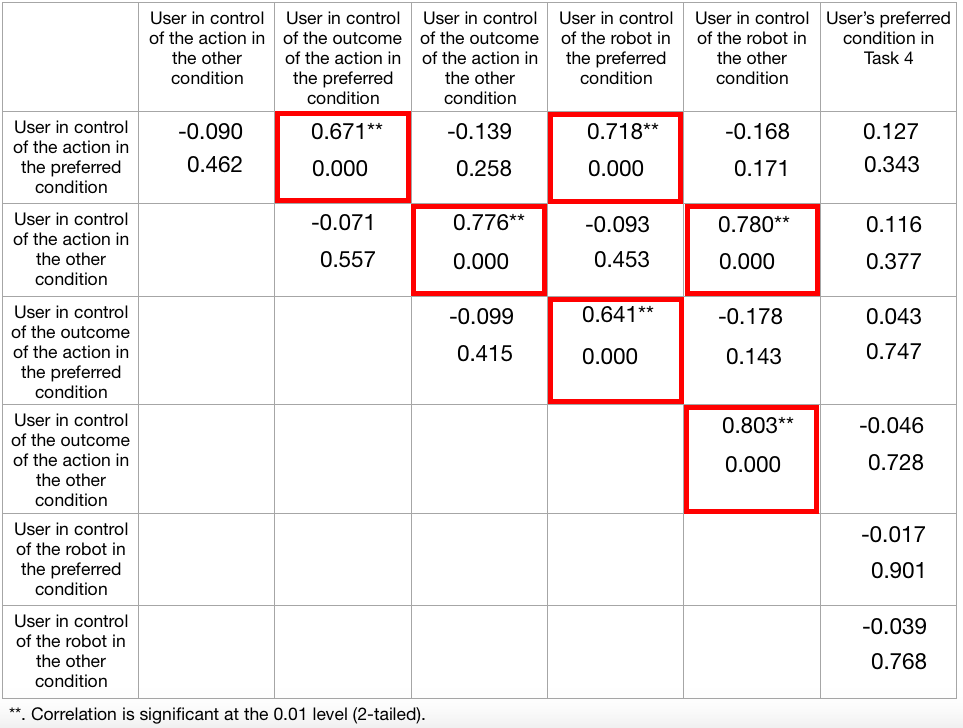
可以注意到,任务4的描述性统计图16显示,与其它任务相比,条件C1(完全自主条件)和条件C2(半自主条件)之间的差异较小。在任务4中,当用户引导机器人前往客厅时,18%的用户更偏好C2; 而当机器人自主决定前往客厅时,78%的用户更偏好C1,6%的用户未做决定。肯德尔τ相关性检验图17表明,在两种条件下,对动作的控制感知与对动作结果的控制感知之间均存在统计上显著的强正相关关系(偏好条件下τb= 0.671,p< 0.001, 以及 τb= 0.776,p< 0.001)。此外,控制感知与
动作结果的控制以及在两种条件下对机器人控制的感知 (对于首选条件 τb= 0.641,p=< 0.001,而对于另一种条件 τb= 0.803,p< 0.001)。这意味着用户越不觉得自己能够控制“搬运饼干”这一动作,就越不觉得自己能够控制“饼干被运送到客厅”这一结果,并且在其首选条件下,越不认为自己对机器人具有控制权。这一点非常有趣。对于大多数参与者而言,首选条件是 C1,即机器人在没有参与者指导的情况下自行决定将饼干运送到客厅。
总之,我们可以看到结果在各项任务和条件下是一致的。当人们在某一条件下感到对机器人有控制时,他们也会在同一条件下感到对动作以及动作的结果有控制。
这些结果并未验证
验证H2假设。用户对动作/动作结果/机器人控制程度的感知与参与者对机器人自主级别的偏好之间存在更为微妙的联系。结果表明,对于任务2(医生)和任务4(饼干),参与者感觉越有控制力,他们就越希望机器人具有更高的自主性。然而,对于任务3(跳舞),研究发现参与者感觉控制力越强,他们就越不希望机器人具有自主性。
5.4 R3. 任务关键性
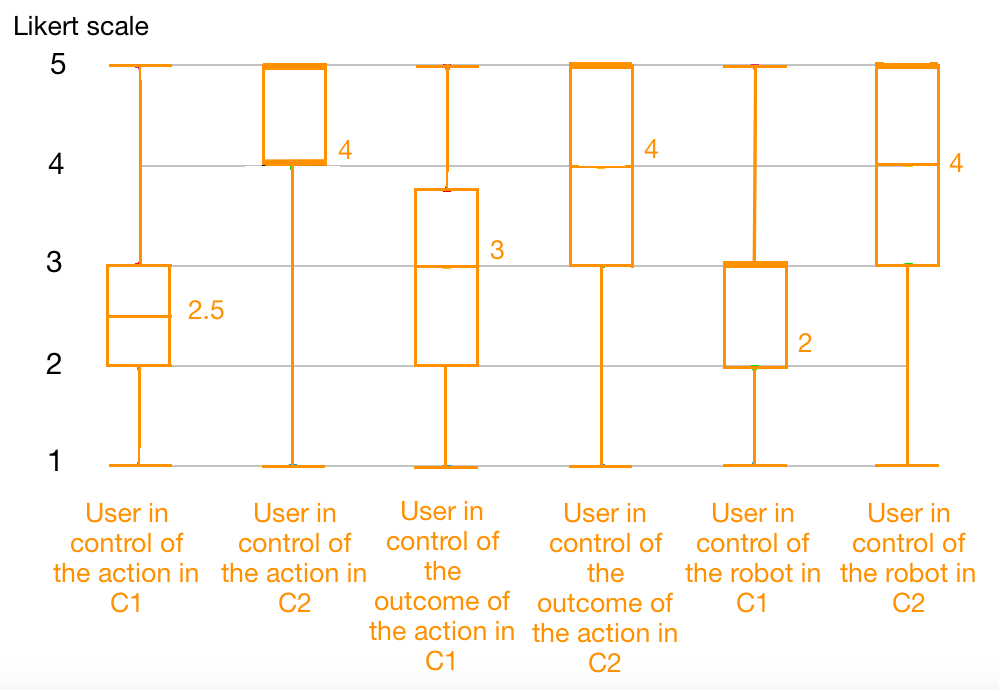
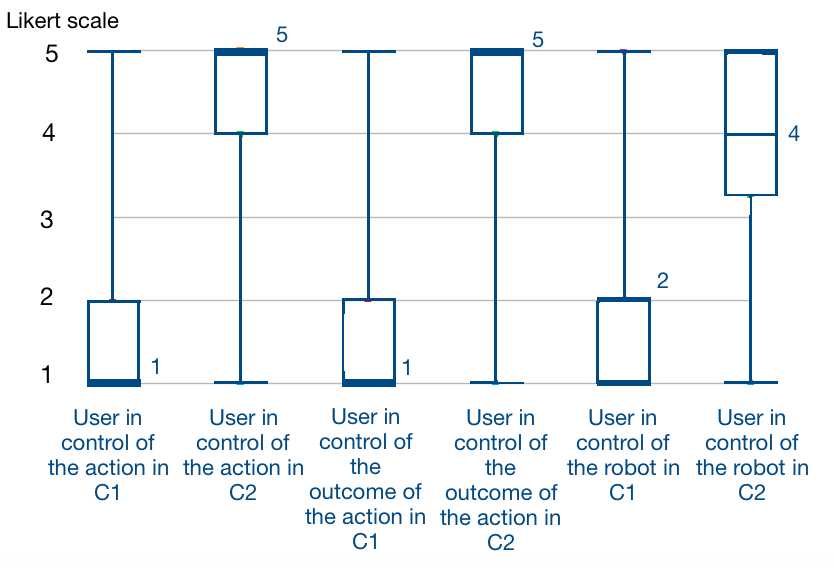
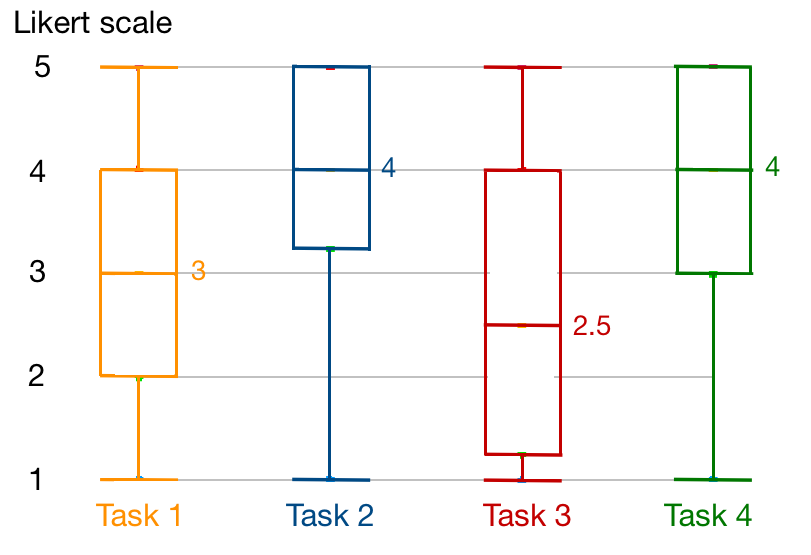
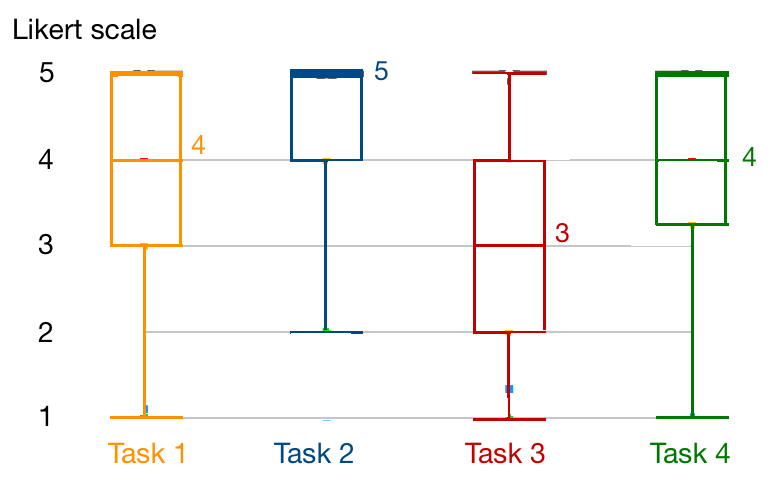
为了验证任务关键性的分类,参与者被要求根据1到5的量表对机器人执行的任务的关键性进行评分(1表示低关键性,5表示高关键性)。如图19所示,任务2 医生和任务4 饼干被评为高关键性任务(中位数task2= 4,标准差task2= 1.11 和中位数task4= 4,标准差task4= 1.25)。任务1乐高似乎被评为中等关键性(中位数task1= 3,标准差task1=1.35),而任务3 跳舞被评为低关键性(中位数task3= 2.5,标准差task3= 1.32)。
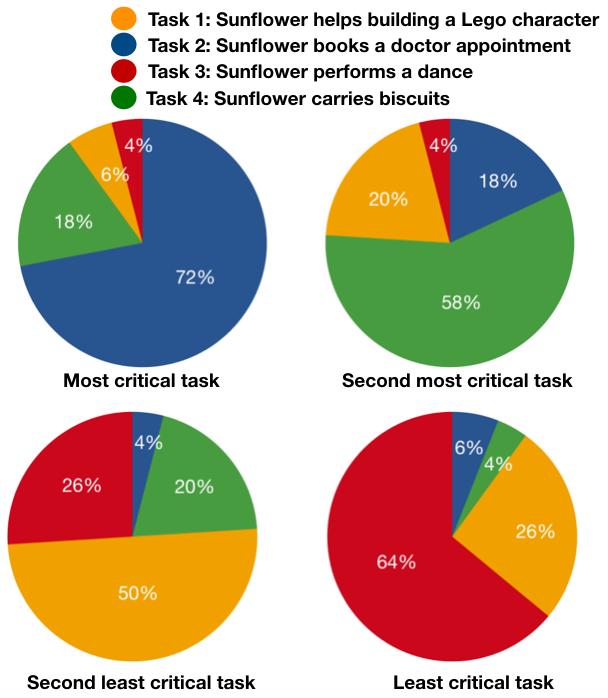
实验结束时,要求参与者对各项任务按从最关键到最不关键的顺序进行排序。72%的参与者认为预约医生是最关键的任务。第二关键的任务是搬运饼干,占58%。需要注意的是,18%的参与者认为此任务是最关键的任务。第三关键的任务是搭建乐高人物,占50%(26%的参与者认为此任务是最不关键的),最后,64%的参与者认为跳舞是最不关键的任务。
肯德尔τ相关性检验表明,用户对任务1乐高关键性的评分与用户对关键性的评分之间存在统计学上高度显著的正相关。
任务3跳舞的临界性评分之间存在显著正相关(τb= 0.366,p= 0.002),以及用户对任务1乐高的关键性评分与用户对任务4饼干的关键性评分之间也存在显著正相关(τb= 0.356,p= 0.002)。这意味着,人们认为任务1乐高越关键,他们也越倾向于认为任务3跳舞和任务4饼干越关键。此外,人们对任务2医生的关键性评分与对任务4饼干的关键性评分之间也存在强烈的显著正相关(τb= 0.469,p< 0.001)。因此,人们对任务2医生评价越关键,他们对任务4饼干的评价也越关键,这与人们在各项任务之间的排序方式一致,因为任务2医生和任务4饼干被评定为最关键的任务(图19),而任务1乐高和任务3跳舞则都被评为最不关键的任务。
肯德尔相关性检验还表明,参与者对任务3关键性评分与任务4关键性评分之间存在高度显著的正相关( τb= 0.388,p= 0.001),这意味着人们认为任务3越关键,他们也越认为任务4关键。这可能与任务3关键性的评分方式有关,如图19中的箱线图所示,与其他任务相比,任务3的评分分布更为分散。这可能是由于参与者对任务3的理解不同所致,即与机器人一起跳舞,有些人可能认为他们需要教会机器人,这可能会提高该任务的关键性。
然而,测试结果显示,在任何任务中,人们对任务关键性的评分方式与其首选条件的选择之间均无统计学显著相关性。因此,假设H3a和H3b未得到验证。我们不能认为任务的关键性水平与向日葵机器人的控制水平选择之间存在关联。此外,人们对任务关键性的评分方式与其期望的控制水平之间也不存在相关性。这意味着无法得出人们越倾向于控制,就越会将任务评为高关键性的结论。因此,H3c也未得到验证。
5.4.1 低关键性任务与控制感
测试结果显示,在任何任务和条件下,参与者对任务1的关键性评分与其对动作的控制感知、对动作结果的控制感知或对机器人控制的感知之间均无相关性。这意味着参与者将任务1(搭建乐高人物)评定为低关键性任务的方式,并未影响他们在4项任务中的任何一项中对所执行动作的控制感知,也未影响他们在4项任务执行过程中对机器人控制的感知,或对动作结果控制的感知,无论处于何种条件。对于任务3的关键性评分以及参与者对动作/ 动作结果/机器人控制的感知,在任何任务和条件下也显示出相同的结果。
5.4.2 高关键性任务与控制感
5.4.2.1 任务2:预约医生
任务2中医生关键性评分与参与者在T1/C2乐高半自动情境下对机器人控制的感知呈统计学上显著的正相关关系,即当参与者决定机器人何时在其平板电脑上显示下一个搭建乐高人物的指令时(τb=0.255,p= 0.037)。这意味着,参与者越认为任务2是关键任务,他们在任务1中就越感到能够控制机器人。
任务2医生关键性评分与参与者在决定何时预约医生时对T2/C2 医生/半自动中动作的控制感知之间存在正相关关系(τb=0.394,p= 0.002),以及对T2/C2 医生/半自动中动作结果的控制感知之间也存在正相关关系 (τb= 0.321,p= 0.011),以及在T2/C2 医生半自动中对机器人控制的感知(τb= 0.303,p= 0.013)。因此,人们认为任务2越重要,在选择要预约的时间段时,他们对“预约医生”这一动作的控制感就越强。同时,由于他们自行选择了预约的时间段,他们对结果的控制感也更强,并且由于机器人遵循了用户的指令,他们对机器人的控制感也更高。该结果表明任务2的控制感知内部具有一致性。
参与者对任务2 医生的关键性评分与其在T4/C1 饼干/ 自动情境中对机器人自主决定将饼干运送到客厅这一动作的控制感知之间也存在正相关(τb= 0.354,p= 0.003)。因此,任务2 医生被评定的关键性越高,人们在机器人在没有指令的情况下操作时,对“运送饼干”这一动作的控制感就越强。
5.4.2.2 任务4:搬运饼干
测试结果显示,任务4关键性评分与在T1/C2 乐高/半自动条件下对机器人控制的感知之间存在统计学上显著的正相关关系(τb=0.274,p= 0.022)。这意味着,人们对任务4的评分越关键,当他们选择向日葵何时显示构建乐高角色指令的下一步时,他们对机器人的控制感就越强。
任务4关键性评分与T2/C2医生/半自动条件下对动作结果控制的感知之间存在显著的正相关关系(τb= 0.285,p= 0.022)。因此,对于参与者而言,任务4越关键,当机器人遵循用户指令时,参与者在任务2中对结果(预约已安排)的控制感就越强。
任务4关键性评分与在T4/C2 饼干/半自动条件下参与者通过语音指令引导机器人前往厨房时对动作结果控制的感知之间也存在显著的正相关关系(τb= 0.244, p= 0.037)。因此,参与者认为任务4越关键,在从厨房引导机器人到客厅时,他们对机器人的控制感就越强。
这一结果很有趣,因为参与者实际上并不更偏好此条件来完成该任务。尽管参与者在引导机器人时感觉更有控制感,但他们仍然更偏好该任务的自主条件C1(即托盘已满时机器人自动前往客厅)。这很可能是因为对于此类物理任务,参与者更看重效率而非控制。正如许多人所提到的,
“[机器人]的自主移动更快,且参与者所需付出的努力更少。” 总之,这些结果表明,当任务被视为关键时,任务关键性的评分与对机器人控制的感知之间存在统计学上的显著相关性。当任务不被视为关键时,无法得出关于行动/动作结果/机器人控制感知重要性的结论。因此,假设H3a和H3b未得到验证。
5.5 R4. 任务类型
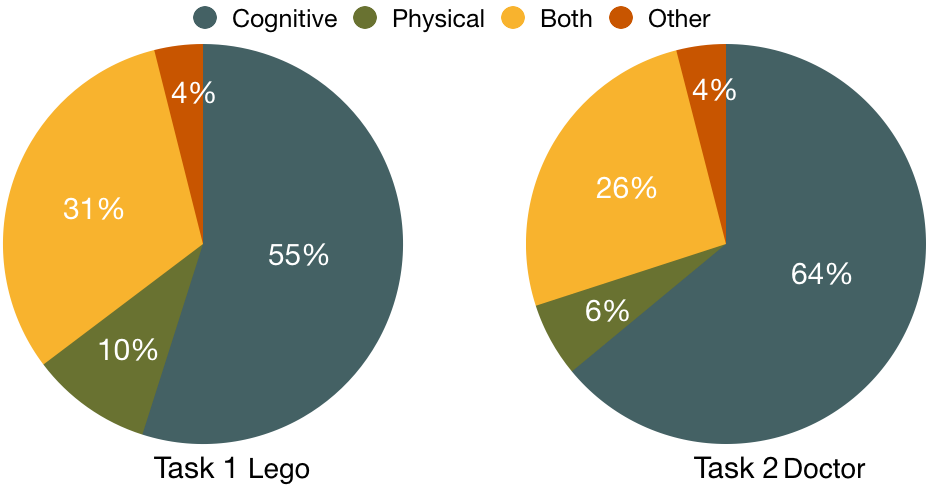
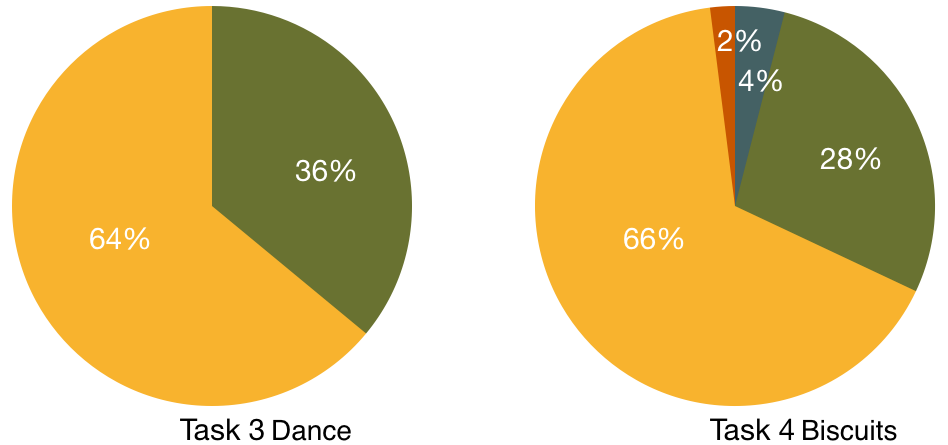
参与者被要求根据任务类型(认知的、物理的、两者兼具或其他)对任务进行分类。正如预期的那样,参与者对任务的选择得到了其分类结果的支持。分别有55%和 64%的参与者认为任务1乐高和任务2 医生属于认知任务。对于任务3 跳舞,分别有36%和64%的用户认为其为物理任务或同时包含认知和物理的任务。任务4 饼干被28 %的人归类为物理任务,66%的人认为其兼具两种类型。
皮尔逊卡方检验表明,参与者对任务2 医生的分类方式与其在任务1乐高中选择的首选条件之间存在统计学上显著的关联(df(6) = 15.783, p=0.015)。此外,用户对任务2的分类与其在任务3 跳舞中的首选条件选择之间也存在显著关联(df(6) = 14.158, p=0.028)。最后,人们对任务4 饼干的分类与其在任务4 饼干中选择的首选条件之间也存在显著关联(df(6) =16.873,p= 0.010)。因此,任务类型似乎会影响参与者对首选条件的选择,这反驳了假设H4,但解释了为何在参与者感觉控制感较低的情况下,任务4 饼干的首选条件仍然是自主条件C1。更可能的原因是该任务属于物理类型,因此与认知任务相比,参与者可能觉得对其进行微观管理更加繁琐乏味。
人们被要求使用1到5的量表(1表示完全不真实,5表示非常真实)来评分他们认为任务的真实感。任务2 医生和任务4 饼干被评为非常真实(中位数task2= 5,标准差task2= 0.93,以及中位数task4= 4,标准差task4= 1.01),而任务1乐高被评为半真实(中位数task1= 4,标准差task1= 1.10),任务3 跳舞则被认为不真实(中位数task3= 3,标准差task3= 1.34)。肯德尔τ相关性检验显示,人们对任务真实感的评分与其对偏好的条件选择之间没有显著相关性。然而,该检验表明任务3 跳舞的真实感评分与任务4 饼干的评分之间存在统计学上显著的正相关(τb= 0.246,p= 0.039)。因此,人们认为任务3 跳舞越真实,他们也越认为任务4 饼干真实。此外,任务2 医生的真实感评分与任务4 饼干的真实感评分之间也存在强正相关(τb= 0.562,p< 0.001)。最有趣的结果是,人们对任务真实感的评分与他们对该任务的批判性评分之间存在显著的正相关(见图22)。因此,一个任务被认为越真实,人们对它的评价就越具批判性。
总之,我们不能说参与者对机器人自主级别的偏好与机器人执行的任务类型无关,因为我们发现了参与者对任务的分类与其首选条件选择之间存在显著关联。因此,假设H4b得到验证。
5.6 R5. 技术经验与知识
为了衡量参与者的技术使用经验,我们询问了他们所使用的技术类型,并让他们估计自己使用这些日常技术的频率。根据参与者的回答,我们将技术使用频率量化如下: 0=没有, 1= 2‐3次/月, 2= 2‐3次/周, 3=超过3次/ 周, 4=每天少于30分钟, 5=1‐2小时/天, 6=2‐3小时/天, 以及 7=超过3小时/天。随后,我们要求参与者在1到5的量表上评估他们对机器人的熟悉程度(1表示完全不熟悉, 5表示非常熟悉)。结果表明,88%的参与者拥有智能手机(其中98%的人每天都会使用),86%的参与者拥有并每天使用电脑或笔记本电脑,32%的参与者拥有并每天使用平板电脑,6%的参与者拥有并每天使用智能手表,12%的参与者每天使用Google Home或Alexa。关于机器人使用经验,参与者在对编程机器人的熟悉程度方面得分非常低(中位数= 1,标准差= 1.06),在编程机器人方面的经验(中位数= 1,标准差= 0.91)以及与机器人交互的熟悉程度(中位数= 1,标准差= 1.03)也都很低。当被问及与机器人互动的频率时,一半的参与者
说从未有过,而36%的人提到之前偶尔提到过(见图23)。
肯德尔相关性检验显示,特定技术的使用频率与参与者在每项任务中选择的首选条件之间存在统计学上显著的相关性(见图24)。人们使用计算机的时间长短与其在任务1中的首选条件之间存在显著的负相关( τb= −0.283,p=0.030)。这意味着,人们使用计算机的频率越高,在机器人指导如何搭建乐高人物时,就越不愿意对机器人进行控制。人们使用智能手机的频率与其在任务2中的首选条件之间也存在显著的负相关( τb= −0.306,p= 0.017)。因此,人们使用智能手机的时间越长,在机器人预约医生时就越不愿意对机器人进行控制。智能手表也发现了同样的负相关(τb= −0.368,p= 0.009)。然而,在任务3和任务4中并未发现相同的负相关。相反,人们使用平板电脑的频率与其在任务3中的首选条件之间存在显著的正相关(τb= 0.247,p= 0.049)。因此,人们使用平板电脑越多,在机器人跳舞时就越希望对机器人进行控制。
总之,参与者的技术熟练度与他们对机器人自主水平的偏好之间存在相关性。我们发现,在两项认知任务中,参与者在智能手机或计算机上花费的时间越多,就越不希望对机器人进行控制。然而,我们的数据并未表明,参与者的机器人使用经验会影响他们对机器人自主级别的偏好。
6 研究的局限性
实验设计中的一个主要难点是如何以一致的方式实现包含两个条件的四项任务。本研究的一个不足之处在于采用了傀儡设置。尽管机器人的导航是完全自主的,但由于时间限制,机器人并未实现语音和手势识别。此外,物理任务的选择也可能带来一些问题。例如,将跳舞作为一项低关键性任务让机器人执行,许多参与者对向日葵如何跳舞感到困惑,有些人并不认为机器人的动作为舞蹈动作。此外,尽管高关键性任务此前已通过验证[14],,但出于伦理原因我们无法使用更极端的任务(例如向日葵帮助扑灭厨房火灾),因为大学伦理委员会禁止任何可能对参与者造成身体或心理危险的实验。因此,在任务4中无法使用眼镜代替饼干。在极端情况下,参与者的反应可能会有所不同[30]。任务4还存在问题,因为一些参与者能够猜到机器人并非自主行动,而且该任务本身变得乏味,因此任务更多地变成了人们操控机器人的好坏,而非机器人的模式(半自主或自主)。任务4的另一个问题是机器人在搬运饼干后所表达的快乐情绪。这是唯一一个机器人明确提及快乐的条件,这可能影响了参与者。此外,各任务之间所花费的时间也可能影响了参与者的选择。平均耗时最长的任务是任务1,即搭建乐高人物。大量
一些参与者在任务中遇到困难,少数人承认自己缺乏乐高搭建经验或空间感知能力较差,这使得任务尤为困难。在这种情况下,参与者的反馈可能更多地基于其个人能力,而非机器人在两种条件下提供帮助的能力。
尽管这组问卷大多是标准化的,但一些采用五点李克特量表,而另一些则采用七点李克特量表,这可能在统计分析的比较方面引起问题。未来将考虑将五点李克特量表调整为七点,以避免该问题。
7 讨论
7.1 首选条件
偏好自主模式C1的人表示,他们觉得向日葵更具互动性,能够自主跳舞并展现出智能。然而,一些选择“其他”的人表示他们没有特别偏好,其中一人提到最初更喜欢 C1自主状态,因为机器人动作的不可预测性带来了乐趣,但随着时间推移,他们更希望机器人能按照指令行事。部分参与者无法区分不同条件,因此在该任务中选择了“其他”类别。这可能是由于任务设计所致。该场景可能未明确说明参与者的目的是与机器人一起跳舞,因此人们可能期望机器人始终跟随他们的动作,以为自己在教机器人跳舞;或者机器人的动作限制可能使一些人难以理解其行为。任务4(搬运饼干)明显表明,当向日葵自主决定将饼干运送到客厅时,参与者更倾向于自主模式C1。参与者提到了多个原因:一些人表示,不必对机器人进行微观管理更加舒适,且比C2半自主状态轻松得多,或认为机器人在此状态下速度更快。然而,也有人表示,他们在C2半自主状态下控制机器人相当困难。一些参与者甚至表示,左右移动似乎让机器人感到困惑,或者机器人没有遵循指令。这可能是因为条件C1的自主状态是由巫师式操作员设定的,因此语音指令与机器人的动作之间存在延迟。然而,机器人的导航是自主的。因此,即使实验人员点击了参与者指示机器人前进的具体方向,机器人也可能选择一条更短的路径。例如,如果参与者让机器人“右转”,而机器人认为先左转再右转会更高效,那么机器人就会先左转再右转,这可能会让参与者觉得机器人没有遵循他们的指令。
7.2 个性对控制感知的影响
在我们的各项任务中,控制欲强的人与他们希望机器人自主程度之间不存在相关性,因此假设H1未得到验证。然而,研究发现,对于偏好条件下的“机器人预约医生”这一行为,人的控制欲越强,他们越感觉自己对该行为缺乏控制。同样,在该行为中还发现,人的控制欲越强,他们在首选条件下越感觉无法掌控机器人。因此可以说,在高关键性认知任务中,即使机器人按照人们偏好的方式行动(完全自主地做出所有决策,或半自主地等待用户做决策),控制欲强的人仍较难感受到对机器人及其执行动作的控制。这可能是因为该任务(任务2:预约医生)也被评为最具真实感的任务,人们更容易将其与自身联系起来,并更清楚地想象其后果,这可以解释为何在其他任务中未发现此类相关性。此外,在所有任务中均发现了某些个性特征的影响,例如开放性与用户对各项任务中机器人的首选条件之间存在负相关。人越具有开放性,就越不愿意控制机器人,这意味着他们更倾向于让机器人具备自主性。这些发现补充了Meerbeek等人[31]的研究,他们在研究中发现机器人的个性会影响用户对机器人控制水平的偏好。然而,人格测试结果需谨慎对待,因为文献指出,在以往的研究中,一些人显然更偏好表现出相似个性的机器人[32],而另一些人则不然。已显示出相反的结果[33]。据推测,这种差异源于机器人所表达的主要任务功能。正如本次实验所证明的,根据机器人执行的任务类型,用户对机器人的期望也不同。
7.3 控制感知、任务关键性及任务类型
7.3.1 低关键任务
结果显示,对于任务1(搭建乐高人物)和任务3(跳舞),参与者更倾向于C2半自主状态,即机器人遵循他们的指令时。这可能是因为参与者认为任务1的成功更多地取决于他们自身的技能,因为他们需要指导机器人展示下一个任务。因此,当参与者感觉到对机器人的控制时,他们可能认为正确完成任务更为重要。这与Meerbeek等人[31]早期的研究结果相矛盾,他们在研究中发现,当机器人执行电视助手任务(选择电视频道)时,参与者对其控制水平没有明显偏好。但正如这些研究人员在文章中提到的,他们的研究重点在于机器人表现出的不同个性行为,因此这一结论需谨慎对待。此外,在该研究中似乎并未要求参与者评估其任务的关键性。本实验关于低关键性任务的结果与我们第一次实况实验[12],的发现一致,在该实验中,机器人伴侣执行的是清洁任务,根据我们的问卷调查研究[14],该任务被认为属于低关键性任务。参与者越倾向于控制,就越希望机器人能够更加自主。本次实况实验的结果不仅与先前的研究结果一致,而且由于有50人参与了本研究,而Meerbeek十多年前的研究仅有33人参与,因此更具说服力。因此,对于低关键性任务,参与者更希望掌握对机器人的控制权。
7.3.2 高关键任务
正如我们的结果所示,对于任务2医生和任务4饼干,当机器人处于自主状态C1时,参与者感受到的

















 1639
1639

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









