






gazebo独立于ROS2,就像插件一样,需要安装。
1.安装
sudo apt install gazebo
sudo apt install ros-humble-gazebo-*
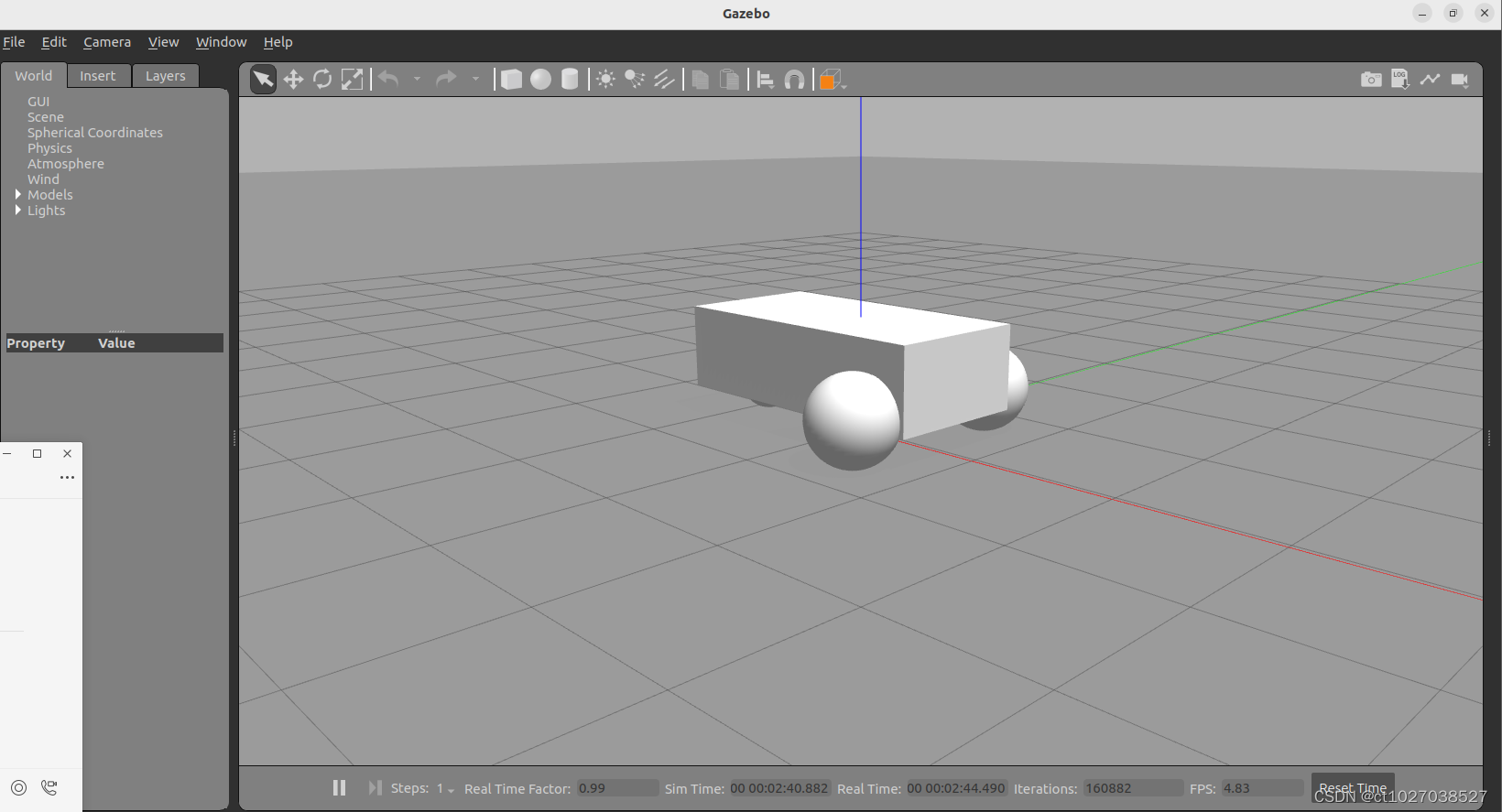
2.运行测试demo
gazebo /opt/ros/humble/share/gazebo_plugins/worlds/gazebo_ros_diff_drive_demo.world
查看所有话题
ros2 topic list -t

发送话题、小车行进
ros2 topic pub /demo/cmd_demo geometry_msgs/msg/Twist "{linear: {x: 0.2,y: 0,z: 0},angular: {x: 0,y: 0,z: 0}}"

3.总结
RVIZ2是用来可视化数据的软件,核心要义是将数据展示出来(我们不生产数据只做数据的搬运工)
Gazebo是用于模拟真实环境生产数据的(我们不搬运数据只做数据的生产者)
Gazebo是独立于ROS/ROS2的软件(还有很多仿真软件可以用ROS/ROS2)
ROS2和Gazebo之间的桥梁是:gazebo_ros_pkgs


















 2374
2374

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









