



“CREA”:一种基于探究的方法论,用于向儿童教授机器人技术
摘要
学习编程和机器人技术提供了实践解决问题、创造力和团队合作的机会,并为21世纪所需的重要能力培养提供了支持。然而,编程可能具有挑战性,儿童在学习语法或使用编码环境时可能会遇到困难。为解决这一问题,我们开发了一种基于探究式学习、实践性活动以及可视化编程的教学方法论,用于教授编程、设计和机器人技术。我们在巴塞罗那一所国际小学的课外活动中应用并评估了这一新方法论。研究结果表明,学生掌握了技术术语,理解了电子设备的工作原理,并通过机器人的行为理解了将编码映射为动作的过程。这表明我们的方法是一种有效的机器人技术和编程教学设计的方法论。
关键词 :教育技术 Instructional设计 Robotics
1 引言
在小学阶段教授计算机科学(CS)和机器人技术,其目标不应仅限于让学生学习编程或搭建机器人,而应提供其他有助于解决问题、发挥创造力和促进团队合作的学习工具与技能[1]。这将帮助学生反思自己的解决方案[2],做出自信的决策,并发展社交、情感和认知能力[3]。因此,这些学习工具符合所谓的21世纪4C技能:沟通、批判性思维、协作和创造力。正因如此,计算机科学和机器人技术在学校课程中日益受到重视[4–6]。然而,对于年轻学生而言,编程可能较为复杂[7],因为他们可能在学习过程中遇到困难。
语法、编码环境和编程语言的命令[8]。在接触正式编程之前,先学习计算思维(CT)——即运用计算机解决复杂问题所必需的一系列思维技能和方法[9, 10],有助于学生更顺利地过渡到正式语言的学习。此外,使用有形环境可以帮助绕过对计算机熟悉度的需求[11],并消除因学习使用计算机而带来的分心。
在我们与小学生(10–12岁)的教学实践中,我们发现了若干需要优化的关键问题,以提升机器人/编程课程的教学效果。本文重点讨论其中三个问题:(1)过度侧重理论教学,(2)学生更倾向于个性化、动手实践和探索式项目,(3)过度依赖正式的编程语言而非计算思维(CT)。因此,我们提出“CREA”作为针对该年龄段儿童教授计算机科学的方法论。
2 框架
我们的主要关注点是让学生学习如何构建和编程机器人以完成特定任务。我们的方法论“CREA”(即“通过探索其可供性来编程机器人”)提出了一种协作式探究活动,用于计算机科学和机器人技术的学习,其中学生处于学习过程的中心,教师的角色是引导而非提供信息。为此,构建和编程机器人的过程可分解为更小且易于管理的组成部分。这些组成部分在学生学习编程时具有积极作用[12],它们利用可视化表示,需要口头解释,并促进自主发现。在接下来的章节中,我们将介绍本研究中使用的技术和机器人平台,以及用于教授儿童如何构建和编程机器人的方法论描述。
2.1 工具
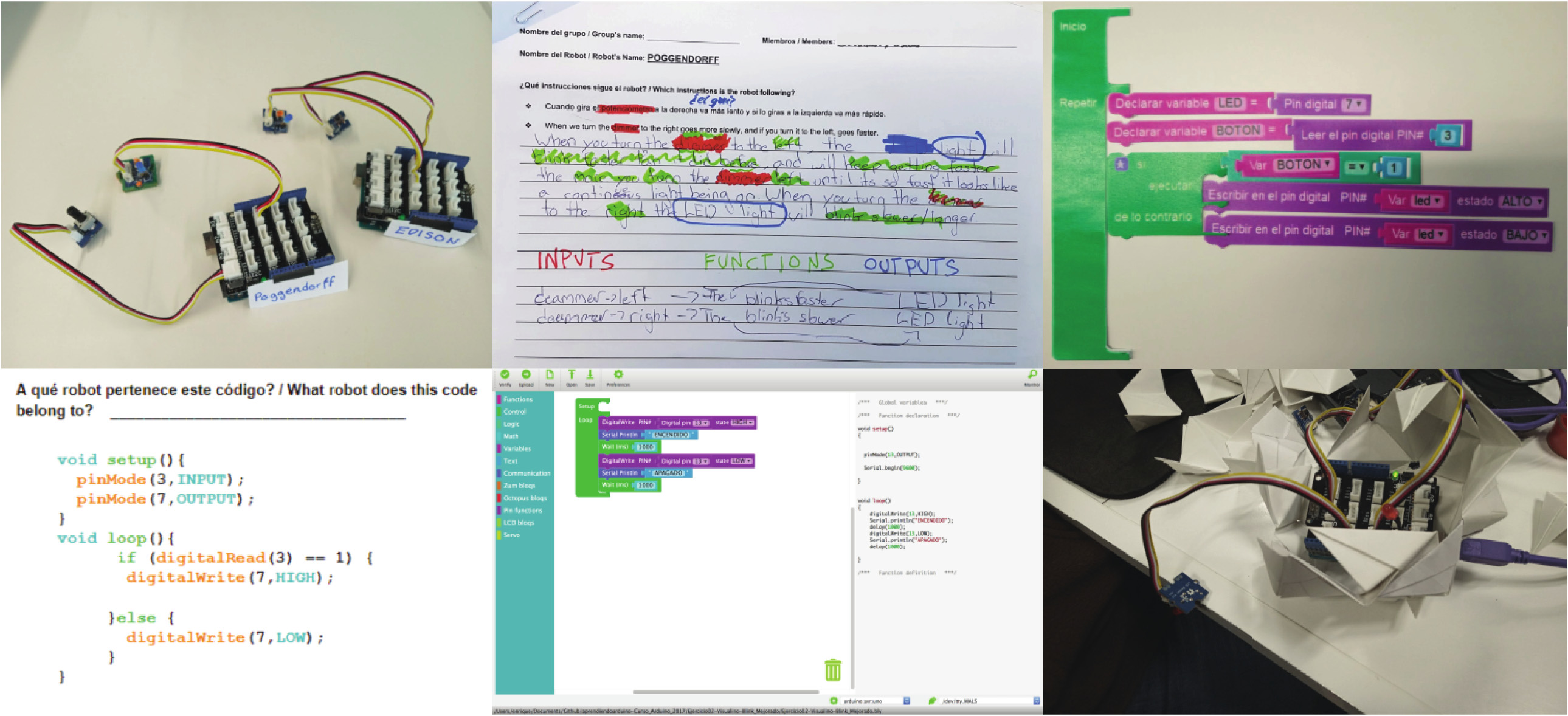
我们机器人平台的基本组件是Arduino Uno1,其上配有Grove2扩展板(为安全性和易用性考虑),儿童可在上面连接多种传感器和执行器,例如电位器、按钮、光传感器和LED灯(图1(1–6))。为了对Arduino进行编程,学生使用了Visualino,这是一种类似于Scratch的跨平台可视化编程环境。Visualino不仅提供可组装成程序的图形化编程模块(图1(5)),促进动手实践,还能生成Arduino的原生代码,因此Arduino运行时无需计算机(https://www.arduino.cc/)。
学生在部分课时中也获得了工作表作为辅助。这些工作表的目的是让儿童记录机器人的行为,并随后利用这些记录来识别机器人的具体组件。之后,这些工作表被用作机器人编程的基础。在每一课时中,儿童收到的机器人(及其由同伴填写的相关工作表)与他们之前使用的不同。

与上一环节配合进行。此次交流旨在确保所有小组都能了解所使用的全部机器人,并促进各小组之间的协作。
2.2 “CREA”——面向儿童编程教学的方法论
我们的课程包含六个单元(课时),每个单元持续一个半小时。在第一个课时(机器人观察,RO)中,儿童以两人或三人一组的形式分组,并在整个课程期间保持同一小组。在此环节中,每组随机接触一个机器人平台,被要求观察该平台、与之互动、识别其行为,并将这些行为记录在工作表上。第一课时作为机器人入门,后续课时则引导学生从初步的机器人部件观察逐步过渡到机器人的编程与构建。因此,学生不仅在开始任务前看到了可能的结果(一个完整构建的机器人),还能够将其分解为独立的部分,并思考这些部分如何单独运作。
对于第二节课 (识别与分析,IA),目标是识别构成机器人的关键要素(输入、输出和引脚),并将其与编程组件(函数)关联起来。为此,学生被分成小组,每个小组的工作表被打印出来,并随机分配给另一个小组。然后要求学生分析工作表上的信息,识别并分类输入、输出、函数、变量和引脚(元件连接到电路板的位置),并使用与Visualino中相同的颜色对其进行编码(图1(2))。最后,要求学生将输入与相应的函数和输出关联起来(例如:按钮 - 输入 - !按下时开启 - 函数 - ! LED - 输出 -)。
在第三次课程(纸质积木,PB)中,之前课程生成的工作表再次被随机分发给各小组,同时分发的还有用于在Visualino中为每个机器人编程的积木的纸质版本。各小组必须首先阅读
 . 纸质积木 (PB))
. 纸质积木 (PB))
根据工作表上的指示,找到对应的Visualino模块并按要求连接起来,就像拼拼图一样(图1(3))。本课时让学生熟悉Visualino模块和编程单元,而无需接触实际界面。在指令分析和纸块课时结束后,各小组分别收到了对其工作的反馈。
在第四课时(Arduino配对,AP)中,学生熟悉软件界面。各小组会收到带有C语言代码的纸张(图1(4)),并需将每张纸与对应的机器人进行配对。通过这种方式,学生初步接触正式编程以及代码如何转化为动作或行为。
随后,每个小组会随机获得一张PB任务图(Visualino积木的图像),并被要求将其翻译成实际的Visualino代码。在第五课时(在Visualino中编程,CV)中,每个小组选择一个机器人,并通过修改Visualino代码来决定机器人的新设计和要实现的任务。这与先前的研究一致,表明能够自主选择项目可提高完成任务的动机[13]。最后,在最后一课时(机器人构建,RC)中,每个小组应用他们在之前课时中学到的知识,为其设计的机器人进行编程。
3 方法论
我们在巴塞罗那的一所国际小学开设的“机器人技术与编程”课外课程中应用了我们的方法论。我们的参与者为全班学生,共10人,其中9名男生,1名女生(年龄:11.11 ± 0.60)。为了评估我们方法论的有效性,在第一课时之前对学生进行了前测,最后一课时结束后进行了后测,以检测他们对计算机科学和机器人技术知识的掌握情况。两次测试均包含12道关于硬件和编程内容的多项选择题(四个选项),涵盖课时中涉及的内容:与Arduino板配合使用的输入与输出,以及使用Visualino进行编程。此外,在最后一课时结束时,我们对每位学生进行了半结构化访谈。访谈的目的是了解学生对课程的评价。具体来说,我们向学生展示图片(见图1),图片展示了六个课时的每一个,并要求他们根据以下标准进行评价:喜爱度(是否喜欢每一课时)、感知难度、是否愿意再次参与、是独立工作还是协作完成,以及是否会删除任何部分。评价方式是针对每个问题对图片进行排序(1–6 分制)。学生对练习的感知难度不仅用于评估自身表现,也有助于识别他们认为具有挑战性的内容[14]。课程的所有内容均使用学生的母语(西班牙语)呈现。
4 结果
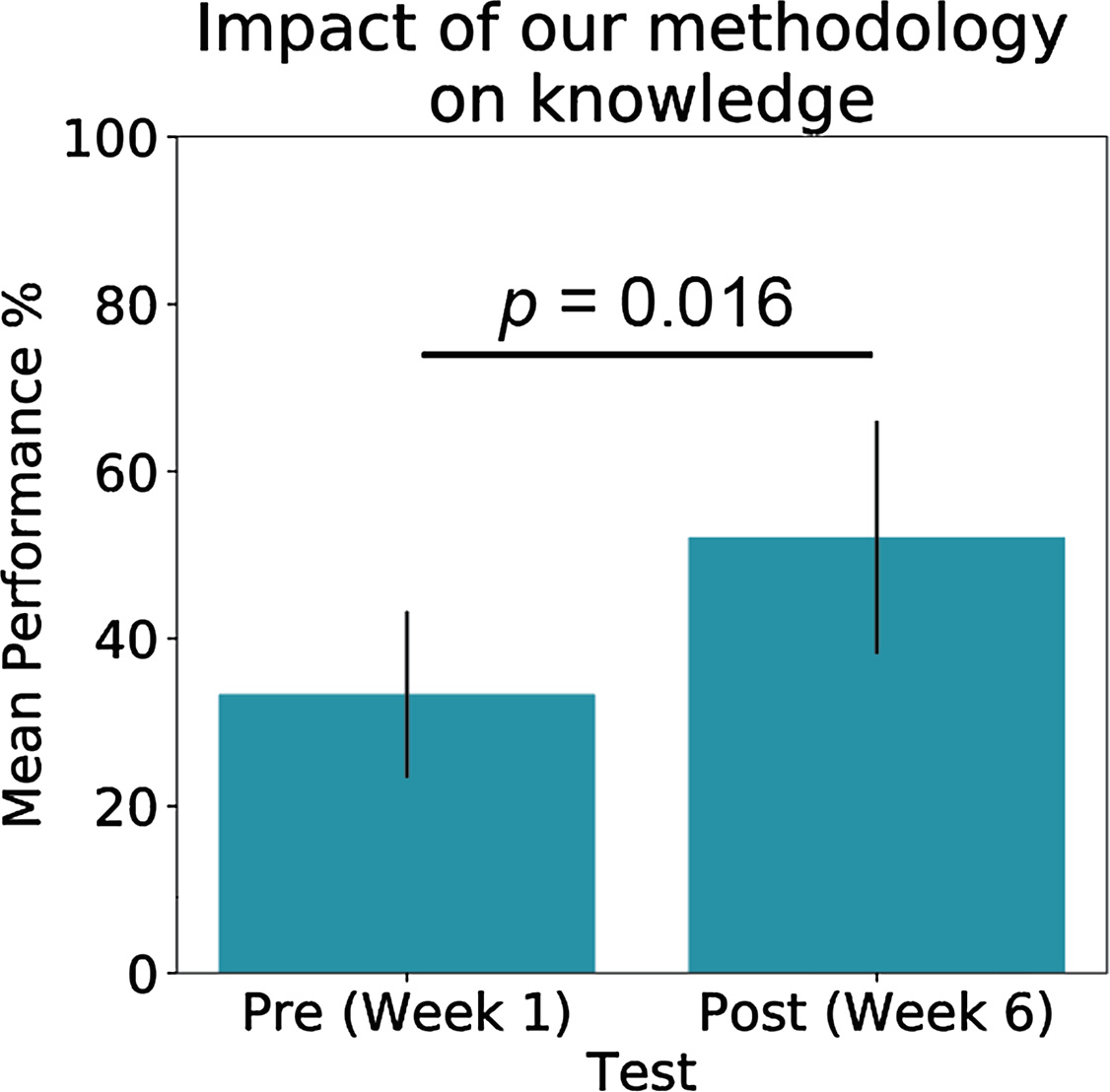
为了量化不同课时之间的学习进展,我们使用了威尔科xon符号秩检验。我们的结果表明,在每次课时后,编程和机器人技术相关知识均有提高(p = 0.016),平均表现达到 33.33% ± 9.32
前测中的平均表现为52.08% ± 13.01,后测中的平均表现也是如此。关于简短访谈,儿童强调了RO课程中以发现为导向的方法;此外,他们表示喜欢猜测机器人的行为。儿童对IA课程的感知受其写作技能的影响。尽管如此,值得注意的是,在他们的描述中使用了在课程期间学到的大部分技术术语。
纸块课时似乎引发了混乱,因为设置很容易被拆解。在这里,我们发现学生对课时的喜爱度与感知难度之间存在负相关(r = −0.93,p < 0.001)。
Arduino配对受到学生的欢迎,因为它允许他们在课堂上自由走动并促进探索行为。然而,学生在理解Arduino代码方面遇到了困难。学生也喜欢 Visualino编程课时,因为它让他们使用计算机。最后,机器人构建课时的喜爱度得分最高,因为它涉及手工制作、创造力,并允许他们选择自己的项目。表 1(图2)提供了儿童对各课时的评价摘要。
| Unit | 喜爱度 (1–6) | 感知难度 (1–6) | 是否愿意再次参与 (%) |
|---|---|---|---|
| 1. 机器人观察 | 4.28 ± 0.75 | 4.39 ± 1.36 | 100 |
| 2. 指令分析 | 2.50 ± 1.37 | 3.00 ± 1.22 | 22.22 |
| 3. 纸块* | 2.54 ± 1.59 | 2.55 ± 1.67 | 44.44 |
| 4. Arduino配对 | 3.72 ± 1.30 | 3.39 ± 1.11 | 66.66 |
| 5. Visualino编程 | 2.83 ± 1.12 | 3.11 ± 1.96 | 77.78 |
| 6. 机器人构建 | 5.22 ± 0.97 | 4.56 ± 1.67 | 100 |
5 讨论与结论
本研究提出了一种名为“CREA”的方法论,用于向小学生教授编程和机器人技术,该方法论包含六个学习阶段,旨在为学生的学习过程提供支架式支持。
我们在一项面向小学生(10至12岁)的课外课程中应用并评估了这一方法论。结果表明,课程第一阶段与最后阶段之间学生的表现有所提升,说明该方法作为教学策略是有效的。然而,由于样本量较小且缺乏可比较的控制条件,我们无法做出普遍性结论。
关于学生对课程中学习活动(编程、设计与搭建)的评价,儿童更喜欢那些涉及手工制作、创造力和计算机使用以及促进团队合作的活动。在提到RO和 IA活动时,儿童使用了“发现”和“猜测”等动词;然而,他们认为IA的写作部分不够有趣或更具挑战性。在比较使用纸质积木和计算机进行编程时,意见存在分歧:一些儿童更喜欢纸质积木提供的有限可能性,而另一些儿童则更喜欢使用Visualino软件探索他们的选项。在方法论的未来版本中,我们将考虑为 PB部分的模块制作更大更坚固的版本(甚至使用贴纸或磁铁),以便更容易组装。
相比之下,其他针对与我们相似年龄范围的儿童教授计算机科学和机器人技术的方法论研究包含更多课时(最多达[15]中的28个课时)或更长的课时(最长至[16]中的150分钟)。在第一种情况下,结果显示实验组在科学工程专业技术概念方面的知识相较于对照组有显著提升。在第二种情况下,结果表明学习者在概念发展上存在个体差异。然而,在其他一些研究中,学习者的年龄比我们研究中的更大(例如,10至15岁 [17])。此外,这两项研究都包含了首先专注于学习理论的课时,而我们为了避免偏离基于探究的学习方法,未采取这种方式。
总体而言,我们的结果表明,我们基于探究的方法论可以为有效教授机器人技术与编程的教学设计提供初步步骤。例如,由于儿童似乎更喜欢与手工制作相关的活动和计算机中介环境,课程活动可以更加以实践为导向,但同时包含计算机的使用。此外,鉴于学生报告在理解Arduino语法(C语言代码)方面存在困难,建议采用其他方式教授计算机科学,例如可视化编程可能更适合此类年龄段的学生。在我们的未来步骤中,我们将进一步完善该方法论,以便将其应用于包含更多组件和更复杂行为的机器人技术中。需要开展更多研究来验证我们的方法论,包括控制多语言背景、性别和不同的学习需求等因素。

















 1433
1433

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









