






本文来源公众号“计算机视觉life”,仅用于学术分享,侵权删,干货满满。
原文链接:https://mp.weixin.qq.com/s/NZnmkmKJnbZe0OZIL20GJA

论文标题:AgriLiRa4D: A Multi-Sensor UAV Dataset for Robust SLAM in Challenging Agricultural Fields
链接:https://arxiv.org/abs/2512.01753
在精准农业快速发展的今天,无人机已成为作物监测、农药喷洒和大规模农田测绘的核心平台。然而,农业环境的独特挑战——如低纹理作物、重复模式、动态植被和光照变化——使得传统的SLAM(同步定位与建图)系统难以稳定运行。多传感器融合是提升鲁棒性的关键,但此前缺乏专门针对农业场景的真实世界数据集。为此,由TopXGun Robotics、杭州电子科技大学计算机学院和南京大学电子科学与工程学院联合研究团队推出的AgriLiRa4D,一个专为挑战性户外农业环境设计的多模态无人机数据集,涵盖LiDAR、4D Radar和IMU数据,并提供厘米级高精度地面真值。
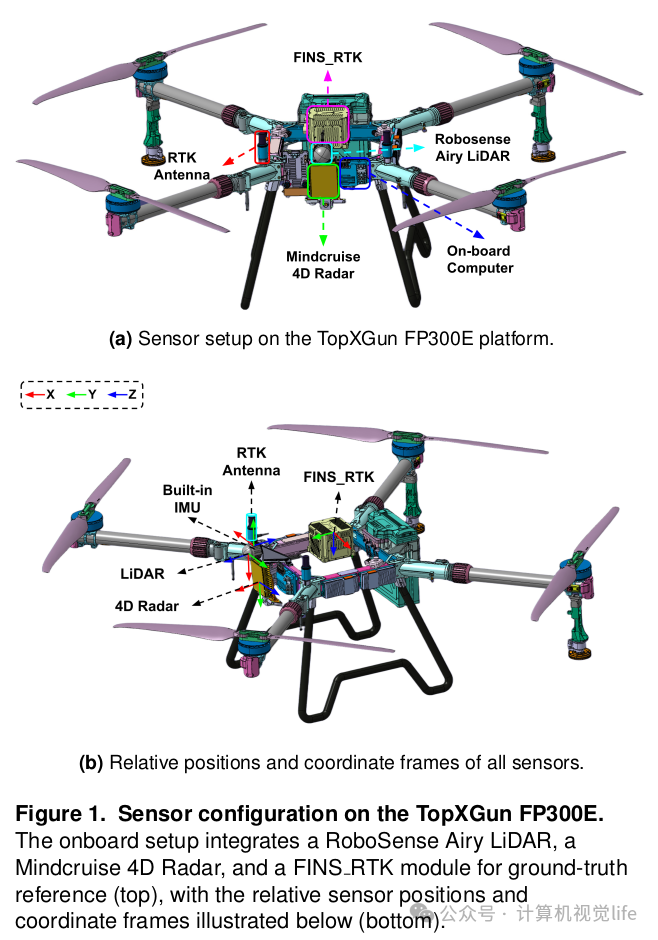
AgriLiRa4D数据集基于TopXGun FP300E农业无人机平台构建,集成了RoboSense Airy 3D LiDAR、Mindcruise 4D Radar和LiDAR内置IMU,并通过FINS_RTK模块提供高精度轨迹参考。所有传感器数据通过ROS框架同步记录,确保了数据的一致性和易用性。
多样化的农业场景与飞行模式
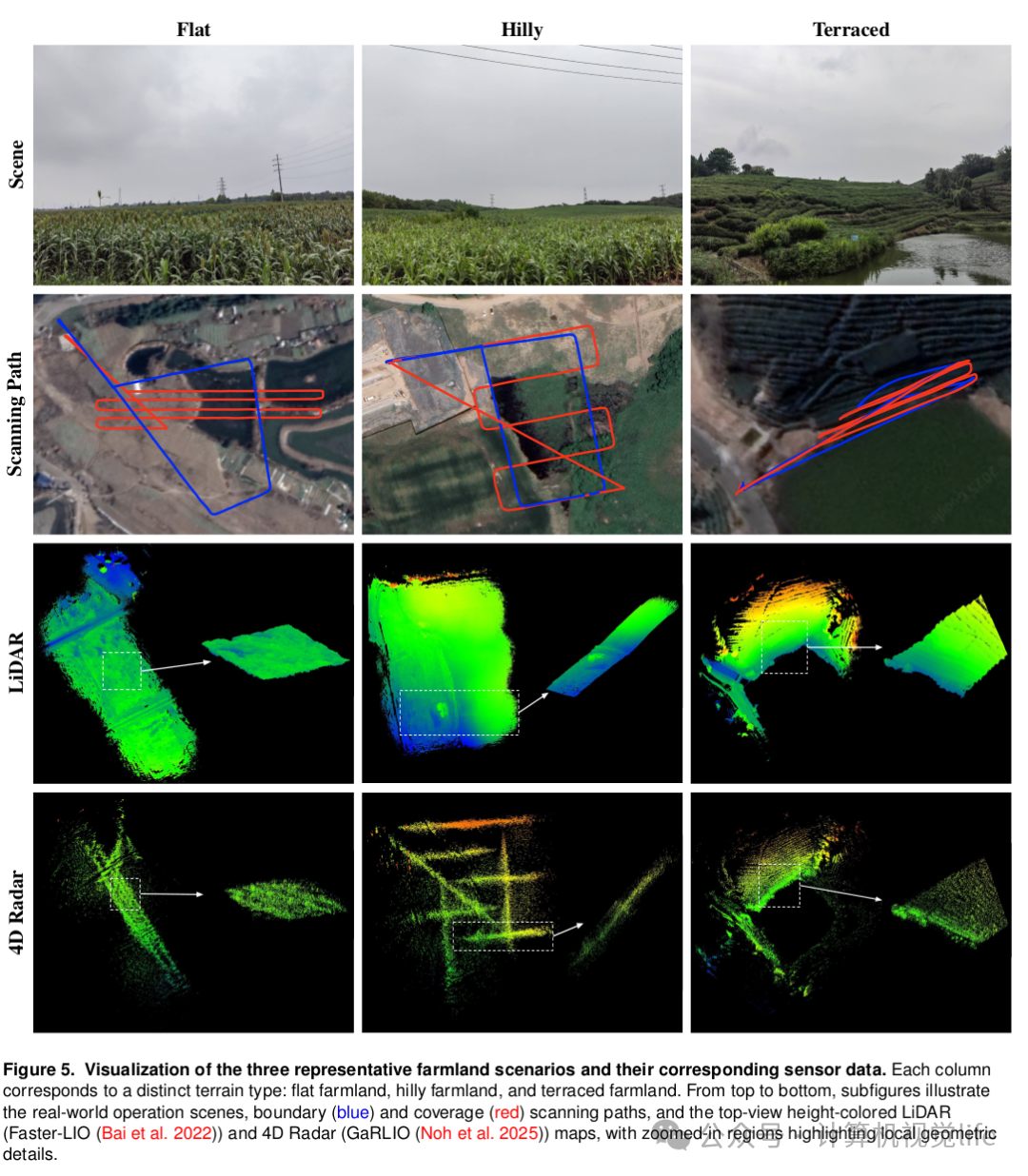
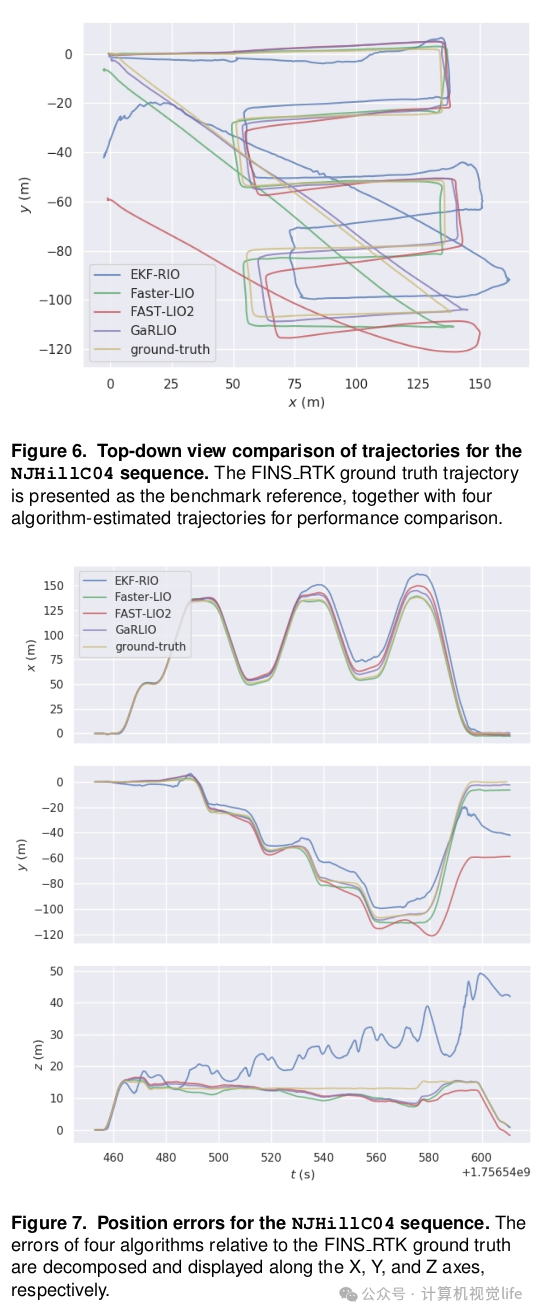
数据集覆盖了三种典型农田地形:平坦农田、丘陵农田和梯田农田,每种地形均包含边界扫描和覆盖扫描两种飞行模式,形成六组飞行序列(如NJFlatB、NJFlatC等)。这种设计充分体现了真实农业任务中的运动多样性和环境复杂性。例如,平坦农田以高粱作物为主,几何特征稀疏;丘陵农田包含坡度变化和混合植被;而梯田农田则具有丰富的结构化几何轮廓,为SLAM提供了更稳定的线索。
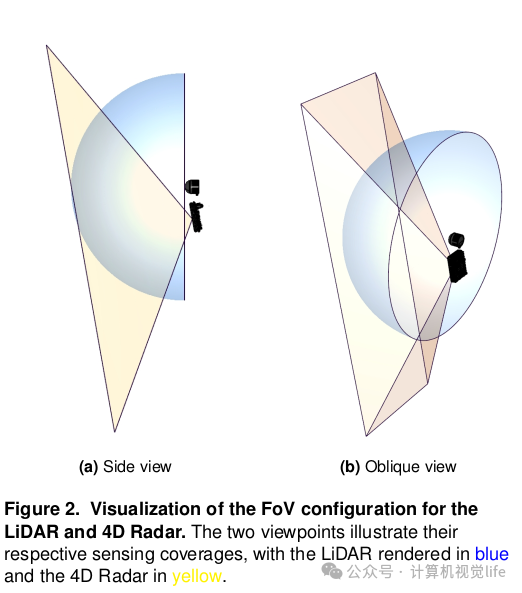
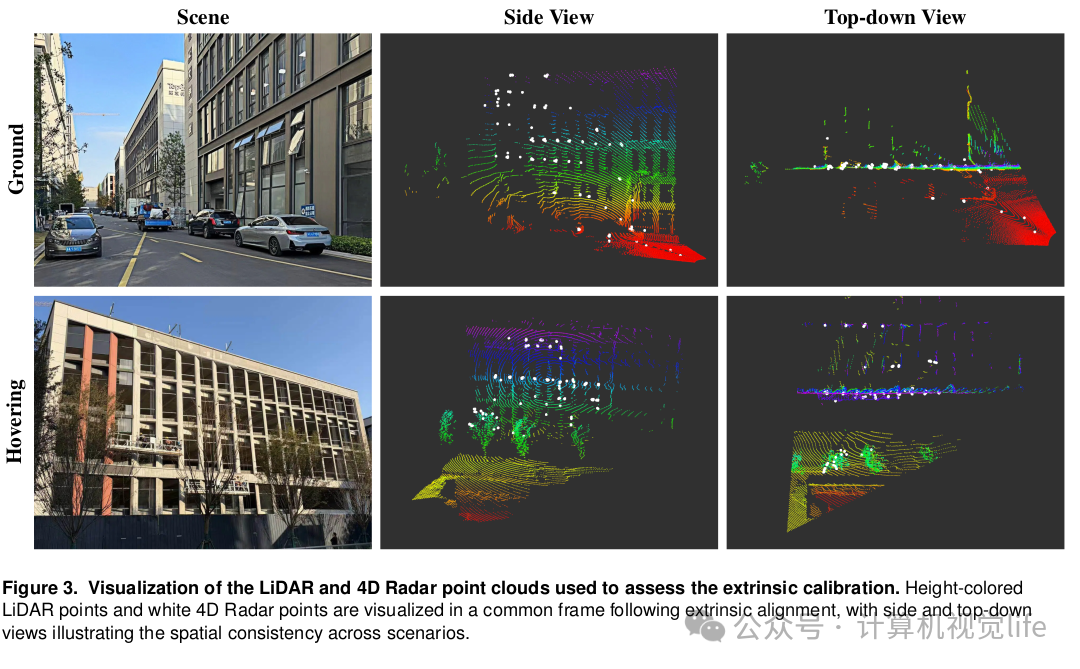
传感器配置经过精心校准,LiDAR和4D Radar的视场互补性显著增强了跨模态感知能力。LiDAR提供稠密精准的几何测量,而4D Radar则具备天气鲁棒性和直接速度估计优势,二者结合为挑战性环境下的定位提供了新途径。
严谨的基准测试与多模态融合分析
为验证数据集的实用性,我们对四种先进的多传感器SLAM算法进行了全面评估,包括LiDAR-惯性(FAST-LIO2、Faster-LIO)、Radar-惯性(EKF-RIO)和Radar-LiDAR-惯性(GaRLIO)方法。实验结果表明,LiDAR-惯性方法在多数场景下表现最为稳定,而Radar-惯性方法在开阔农田中易因稀疏回波和植被运动而失效。多模态融合方法在梯田等结构化环境中展现出潜力,但在高空或高速飞行中仍面临挑战。
推动农业自主导航技术发展
AgriLiRa4D通过系统化的数据采集和完整的校准资料,为农业SLAM研究提供了宝贵的基准。数据集不仅支持多传感器融合算法的开发,还能促进对动态植被、重复纹理和地形变化等现实挑战的深入分析。未来,研究团队计划扩展作物类型、季节变化和极端操作条件,进一步丰富数据集的覆盖范围。
数据集已开放下载,欢迎研究社区访问使用:https://zhan994.github.io/AgriLiRa4D
AgriLiRa4D不仅是技术进步的催化剂,更是连接理论研究与实地应用的重要桥梁。我们期待这一资源能够推动农业无人机在复杂环境中的可靠自主导航,助力精准农业的规模化发展。
THE END !
文章结束,感谢阅读。您的点赞,收藏,评论是我继续更新的动力。大家有推荐的公众号可以评论区留言,共同学习,一起进步。

















 17万+
17万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









