




本文来源公众号“阿旭算法与机器学习”,仅用于学术分享,侵权删,干货满满。
原文链接:PATD-YOLO:基于YOLOv11的智能道路障碍检测算法突破
1. 研究摘要与背景
在这里插入图片描述
道路安全新挑战
在智能驾驶时代,路面障碍物(如井盖、减速带、坑洞等)的实时精准检测直接影响行车安全与舒适性。传统激光雷达方案存在实时性差、成本高的问题,而基于振动信号的方法又存在预警延迟。深度学习虽带来突破,但小目标漏检、复杂纹理误判仍是行业痛点。
创新解决方案
南京航空航天大学团队提出PATD-YOLO算法,基于YOLOv11进行三大革新:
-
双主干动态特征融合(MSB-FDAM)
-
小目标增强金字塔(ESTO-FPN)
-
轻量化检测头(RLDH)
在保持131.6FPS实时性能的同时,检测精度提升3%,参数量仅2.4M,完美平衡效率与精度。
2. 方法原理
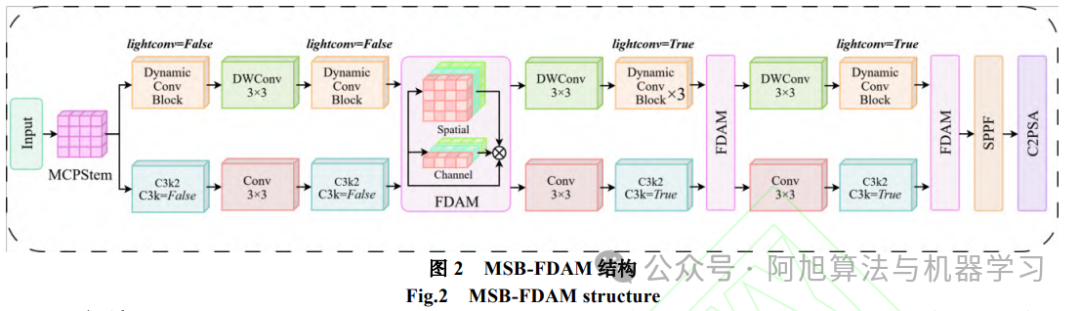
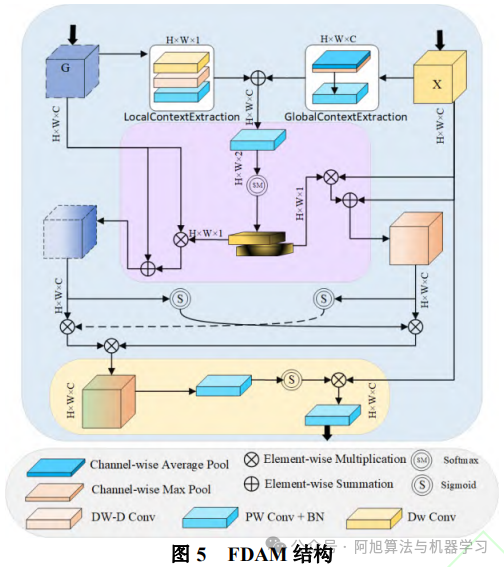
2.1 双主干动态特征融合(MSB-FDAM)
在这里插入图片描述
技术亮点:
-
MCPStem模块:共享浅层特征,减少30%计算量
-
动态卷积块:参数利用率提升4倍
-
FDAM模块:消除多源特征差异,精度提升1.8%
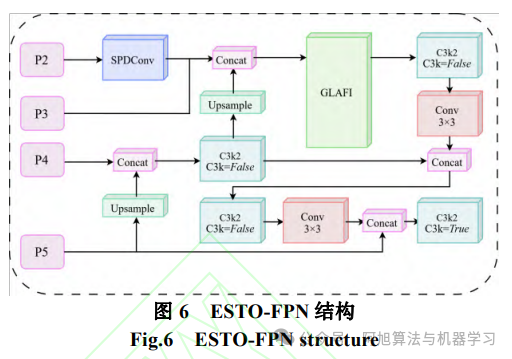
2.2 小目标检测增强(ESTO-FPN)
在这里插入图片描述
三大突破:
-
新增P2高分辨率层(160×160)
-
SPDConv切片操作保留微小目标特征
-
GLAFI模块融合深浅层特征
2.3 轻量化检测头(RLDH)
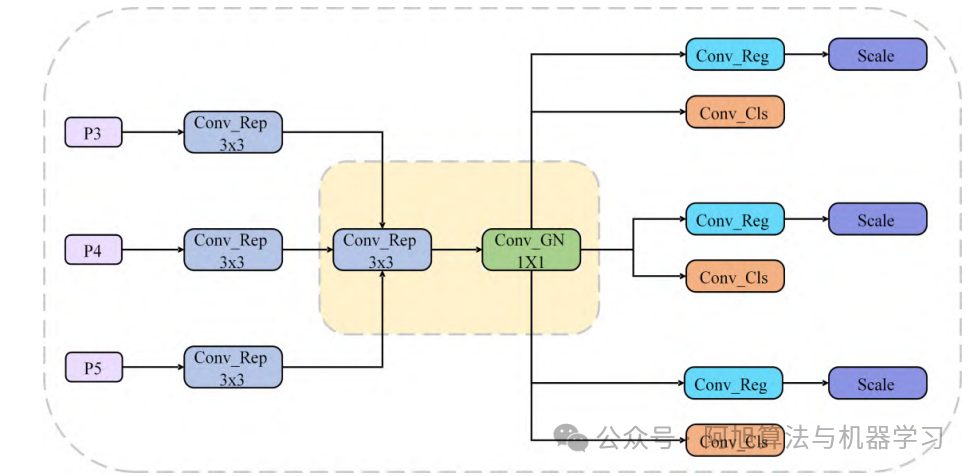
在这里插入图片描述
-
可重参数化卷积减少15%参数量
-
分组归一化实现参数共享
-
动态Scale层自适应调节定位精度
3. 实验验证
3.1 性能对比
| 指标 | YOLOv11n | PATD-YOLO | 提升 |
|---|---|---|---|
| mAP@0.5 | 91.3% | 94.3% | +3% |
| 参数量(M) | 2.6 | 2.4 | -8% |
| FPS | 122.1 | 131.6 | +7.8% |
3.2 实际场景测试
光照挑战:
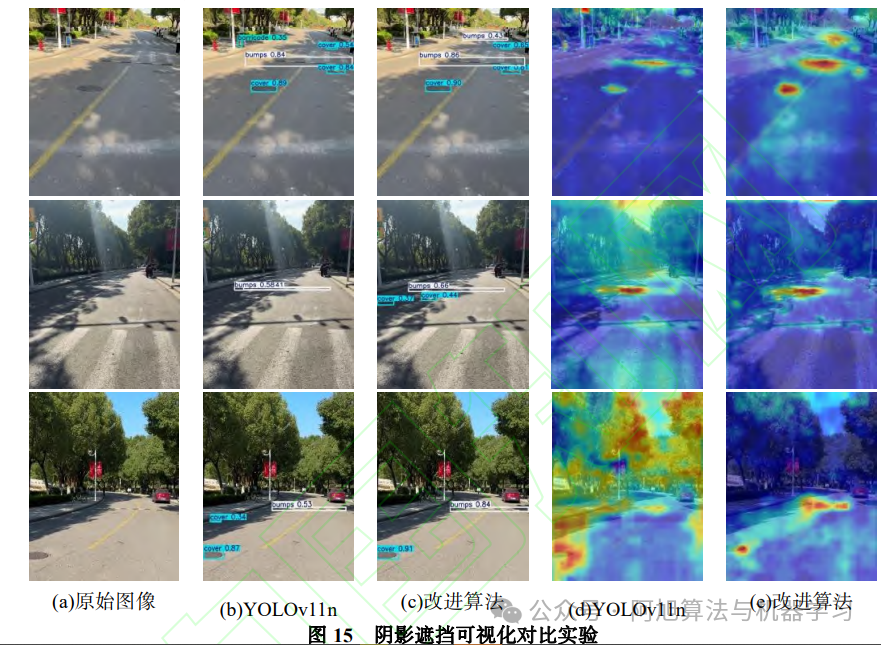
在阴影条件下,传统模型漏检率高达32%,而PATD-YOLO通过多尺度特征融合,误检率降低60%。
3.3 泛化能力验证
在RDD2022公开数据集上:
-
裂缝检测mAP@0.5提升4.3%
-
坑洞(D40)识别精度提高9%
4. 总结与展望
技术价值:
PATD-YOLO以"轻量化+高精度"的组合拳,解决了道路检测中三大核心问题:小目标漏检(<16×16像素)、复杂纹理干扰、实时性要求。其创新模块设计已申请多项专利。
未来方向:
-
模型压缩:探索剪枝与蒸馏技术
-
多模态融合:结合红外与毫米波雷达数据
-
极端天气优化:针对雨雪场景增强鲁棒性
THE END !
文章结束,感谢阅读。您的点赞,收藏,评论是我继续更新的动力。大家有推荐的公众号可以评论区留言,共同学习,一起进步。

















 886
886

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









