






本文来源公众号“OpenCV与AI深度学习”,仅用于学术分享,侵权删,干货满满。
原文链接:YOLOv10在PyTorch和OpenVINO中推理对比
导 读
本文主要介绍如何将YOLOv10模型转为OpenVINO支持的模型并做推理时间对比。
YOLOv10简介
YOLOv10是清华大学的研究人员在Ultralytics Python包的基础上,引入了一种新的实时目标检测方法,解决了YOLO 以前版本在后处理和模型架构方面的不足。通过消除非最大抑制(NMS)和优化各种模型组件,YOLOv10 在显著降低计算开销的同时实现了最先进的性能。大量实验证明,YOLOv10 在多个模型尺度上实现了卓越的精度-延迟权衡。

概述
实时目标检测旨在以较低的延迟准确预测图像中的物体类别和位置。YOLO 系列在性能和效率之间取得了平衡,因此一直处于这项研究的前沿。然而,对 NMS 的依赖和架构上的低效阻碍了最佳性能的实现。YOLOv10 通过为无 NMS 训练引入一致的双重分配和以效率-准确性为导向的整体模型设计策略,解决了这些问题。
网络架构
YOLOv10 的结构建立在以前YOLO 模型的基础上,同时引入了几项关键创新。模型架构由以下部分组成:
-
-
主干网:YOLOv10 中的主干网负责特征提取,它使用了增强版的 CSPNet(跨阶段部分网络),以改善梯度流并减少计算冗余。
-
颈部:颈部设计用于汇聚不同尺度的特征,并将其传递到头部。它包括 PAN(路径聚合网络)层,可实现有效的多尺度特征融合。
-
一对多头:在训练过程中为每个对象生成多个预测,以提供丰富的监督信号并提高学习准确性。
-
一对一头:在推理过程中为每个对象生成一个最佳预测,无需 NMS,从而减少延迟并提高效率。
-
主要功能
-
-
无 NMS 训练:利用一致的双重分配来消除对 NMS 的需求,从而减少推理延迟。
-
整体模型设计:从效率和准确性的角度全面优化各种组件,包括轻量级分类头、空间通道去耦向下采样和等级引导块设计。
-
增强的模型功能:纳入大核卷积和部分自注意模块,在不增加大量计算成本的情况下提高性能。
-
模型支持:
YOLOv10 有多种模型,可满足不同的应用需求:
-
-
YOLOv10-N:用于资源极其有限环境的纳米版本。
-
YOLOv10-S:兼顾速度和精度的小型版本。
-
YOLOv10-M:通用中型版本。
-
YOLOv10-B:平衡型,宽度增加,精度更高。
-
YOLOv10-L:大型版本,精度更高,但计算资源增加。
-
YOLOv10-X:超大型版本可实现最高精度和性能。
-
性能
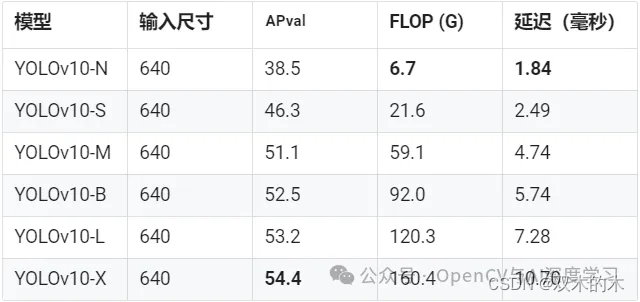
在准确性和效率方面,YOLOv10 优于YOLO 以前的版本和其他最先进的模型。例如,在 COCO 数据集上,YOLOv10-S 的速度是RT-DETR-R18 的 1.8 倍,而 YOLOv10-B 与 YOLOv9-C 相比,在性能相同的情况下,延迟减少了 46%,参数减少了 25%。下图是使用TensorRT FP16 在T4 GPU上的测试结果:
实验和结果
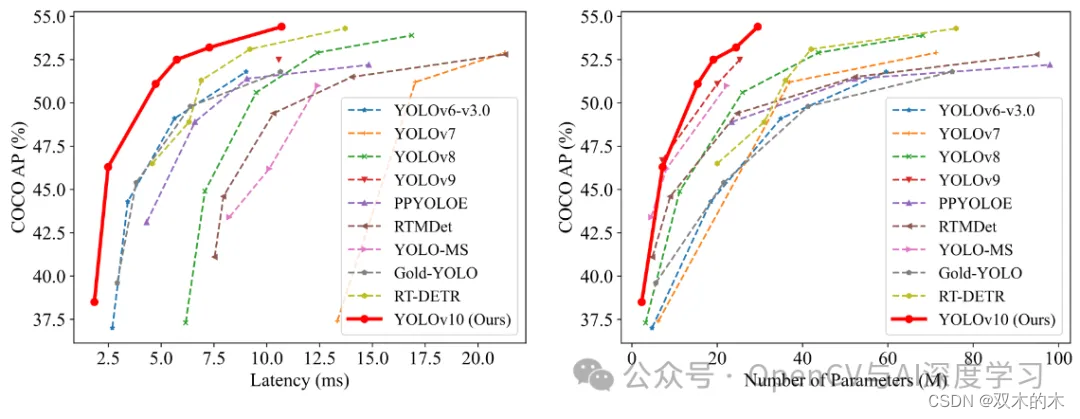
YOLOv10 在 COCO 等标准基准上进行了广泛测试,显示出卓越的性能和效率。与以前的版本和其他当代探测器相比,YOLOv10 在延迟和准确性方面都有显著提高。
YOLO模型转OpenVINO
首先我们需要进行必要的安装:
pip install git+https://github.com/THU-MIG/yolov10.gitpip install openvino openvino-dev
通过这些命令,必要的库的安装就完成了。
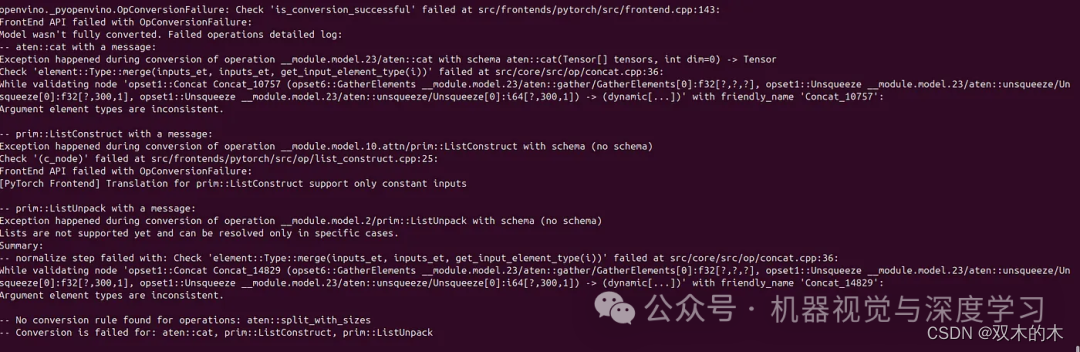
现在我们需要将PyTorch格式的YOLO模型转换为OpenVINO IR格式。但为此,常用的 Ultralytics 导出命令会显示某些错误。这是由于层差异造成的。那么我们如何进行这种转换呢?
如果您尝试使用标准导出命令进行转换,则在 ONNX 后转换为 IR 格式时会出现这样的错误:
那么我们如何解决这个问题呢?首先,对于 Ubuntu,我们需要在安装上述库后更新 PATH。这完全因计算机而异。因此,如果用户已经添加了此路径:
/home/root/.local/bin添加到 PATH,不会出现任何问题。但是,如果没有,则会出现以下警告。
WARNING: The scripts ultralytics and yolo are installed in ‘/home/root/.local/bin’ which is not on PATH.这将导致进程失败。为此,必须先调整 PATH 设置。
只需使用以下命令即可轻松解决此问题。
export PATH=$PATH:/home/root/.local/bin但如果我们希望它持久化,我们可以使用 .bashrc
nano ~/.bashrc在用此命令打开的文件的底行中:
export PATH=$PATH:/home/root/.local/bin添加此行后,我们的 PATH 现在将变为永久的。最后,我们使用 source 命令更新我们的 bash 文件。
source ~/.bashrc现在我们可以进行转换了。
首先你需要从这个地址下载你想要使用的模型并且把它放到python代码将要运行的文件夹中。
https://github.com/THU-MIG/yolov10/releases/tag/v1.1?source=post_page-----e798eed252f8--------------------------------import types
from ultralytics.utils import ops
from ultralytics import YOLOv10
import torch
def v10_det_head_forward(self, x):
one2one = self.forward_feat([xi.detach() for xi in x], self.one2one_cv2, self.one2one_cv3)
if not self.export:
one2many = super().forward(x)
if not self.training:
one2one = self.inference(one2one)
if not self.export:
return {"one2many": one2many, "one2one": one2one}
else:
assert self.max_det != -1
boxes, scores, labels = ops.v10postprocess(one2one.permute(0, 2, 1), self.max_det, self.nc)
return torch.cat(
[boxes, scores.unsqueeze(-1), labels.unsqueeze(-1).to(boxes.dtype)],
dim=-1,
)
else:
return {"one2many": one2many, "one2one": one2one}
model = YOLOv10("yolov10n.pt")
model.model.model[-1].forward = types.MethodType(v10_det_head_forward, model.model.model[-1])
model.export(format="openvino", dynamic=True ,half=True)执行此命令后,我们导出的模型将在同一目录中创建,名称为yolov10n_openvino_model。现在只需使用它!
OpenVINO VS PyTorch
现在让我们做简单的性能比较!
在我的计算机上,配备 Intel(R) Core(TM) i7–7560U CPU @ 2.40GHz,我将首先使用 PyTorch 格式的模型,即 640x640 和 Half,即 fp16。
from ultralytics import YOLOv10
model = YOLOv10("yolov10n.pt")
model.predict(source=0, imgsz=640, show=True)使用此命令,我首先使用 PyTorch 运行模型,结果如下:
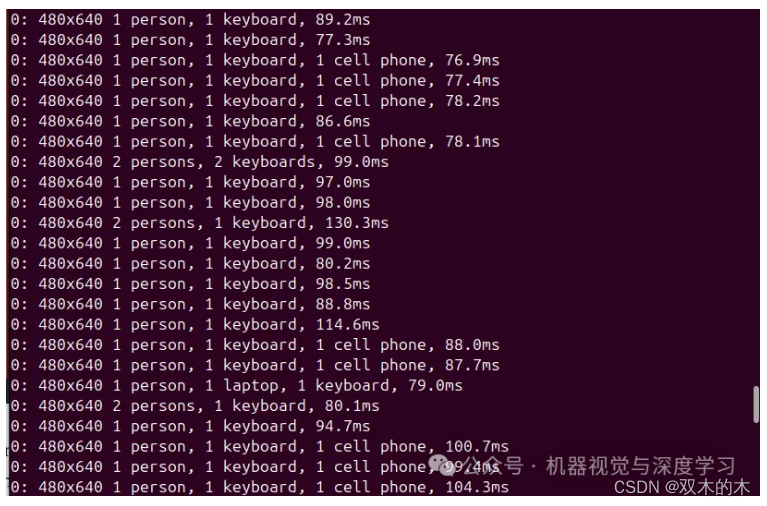
单帧测试时间 70~100ms。那么使用 OpenVINO 会如何呢?
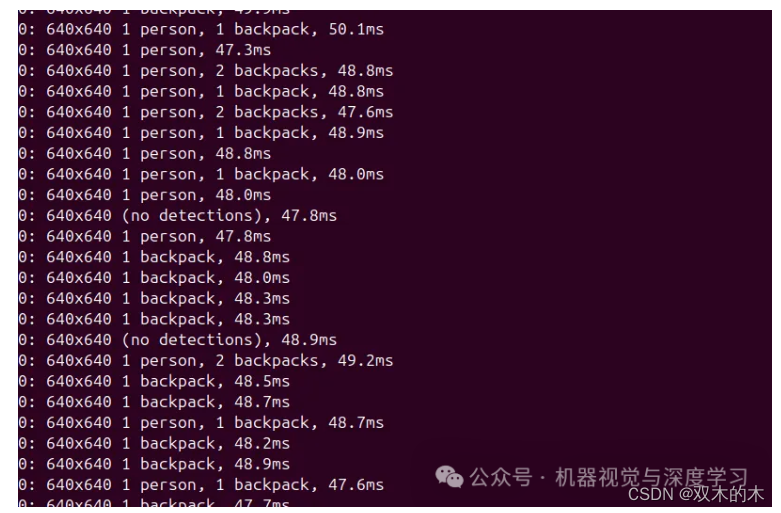
单帧测试时间 40~50ms。这个性能非常棒!
但重点是,要使用 Ultralytics API 来使用该模型,必须在导出命令中将 dynamic 选择为 True。否则将产生错误的推理结果。
THE END !
文章结束,感谢阅读。您的点赞,收藏,评论是我继续更新的动力。大家有推荐的公众号可以评论区留言,共同学习,一起进步。

















 3975
3975

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









