






行车记录仪的出现解决了汽车行驶时音视频的采集问题,相对于第三方独立的行车记录仪品牌,主机厂自带的记录仪相对要更全面一些,特别是一些电动车品牌。而特斯拉(Tesla)的行车记录仪绝对的“鹤立鸡群”,比如大名鼎鼎的“哨兵模式”,其摄像头覆盖范围基本上是全车无死角,你需要做的就是仅仅提供一个存储设备(比如U盘)就可以了。行车记录仪在方便大家的同时也会面临数据安全问题,因为存储设备是处于读/写(R/W)状态之下,下面我们来看下特斯拉行车就仪删除视频的恢复方法。
故障存储:
优盘容量:128GB/文件系统:exFat/簇大小:128KB
故障现象:
由于车机管理系统“循环删除”导致不少视频文件丢失,客户要求恢复剩余空间中的所有视频文件。
故障分析:
特斯拉(Tesla)车机中的行车记录仪至少是前/后/左/右四路采集,这种传输的数据量是比较大的,所以删除后存在覆盖的可能性,当出现误操作后正确的操作方法是“断开存储设备和车机的物理连接”。而从图1可以看到这个优盘还有大约5.37GB的未使用空间(图1),相对来讲剩余空间越大恢复的可能性就越高!

图1:优盘可用空间5.37GB
故障处理:
特斯拉(Tesla)行车记录仪的恢复可以使用CHS零壹视频恢复程序高级版来扫描,操作方法也很简单。
STEP1:选择要扫描的逻辑磁盘点击右键->扫描类型选择“仅扫描删除空间”->扫描大类选择“记录仪”->扫描小类选择“样本文件”,添加样本文件后点击“扫描”即可。
添加样本时也要注意,像特斯拉(Tesla)存在四路摄像头,添加样本时一定要添加你所需要的那一路生成的视频文件,本例中由于需要后置摄像头,那么我们要添加的就是后置摄像头中的视频文件,下边是如何分辨的方法。
特斯拉(Tesla)车机格式化U盘后会在根目录下生成一个“TeslaCam”的文件夹,此文件夹下有三个子文件夹:
- RecentClips:包含最长 60 分钟的录制内容(循环删除)。
- SavedClips:包含从 RecentClips 文件夹保存和重命名的所有录像。
- SentryClips:包含所有哨兵模式安全事件的录像(循环删除)。
上述三个文件夹中的视频文件都是可以做为样本的,那么如何分辨视频文件是前/后/左/右那一路摄像头采集的呢?这个请参考特斯拉(Tesla)行车记录仪的命名规律:
2025-02-03_17-43-14-front.mp4
可以看到前边的是日期和时间最后一项加粗的则为前(front)/后(back)/左(left)/右(right)摄像头的标识,本例中我们需要恢复的是后置摄像头生成的视频文件,所以添加的也是后置(back)摄像头生成的样本文件(如图3),由于要恢复删除的文件所以扫描方式选择“仅扫描删除空间”。
强烈建议扫描时添加样本文件,程序会解析样本文件并根据其编码、结构、特征等参数建立精确模型,可以大大提高扫描时的定位精确度,做到“有的放矢”。(具体样本要求请参考博主”样本文件的使用方法以及注意事项”的帖子)
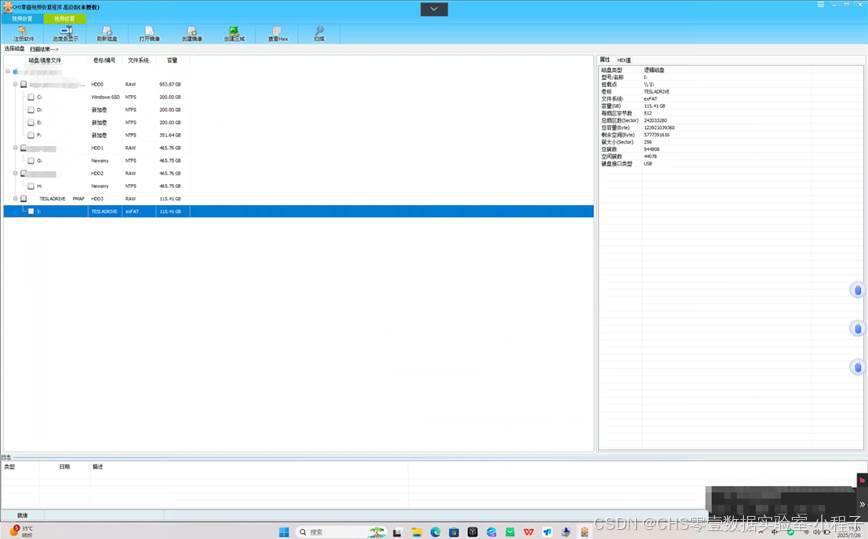
图2:选择逻辑盘(本例为exFat)
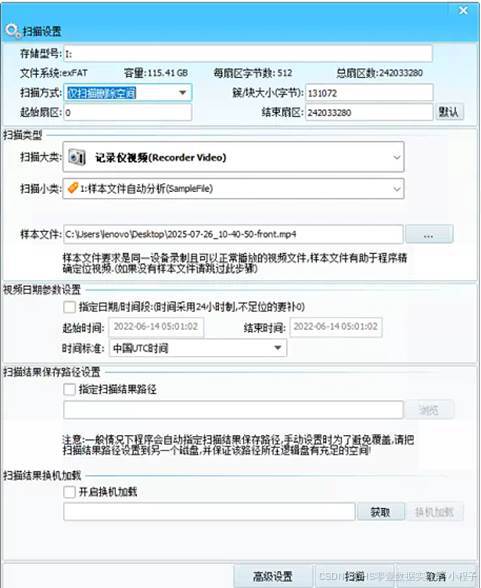
图3:添加正确的样本文件
STEP2:等待扫描完成,添加样本后程序会解析样本文件的各种参数(类型/拍摄时间 /速率/编码等),这些参数可以助力扫描算法精确定位同参数的视频文件。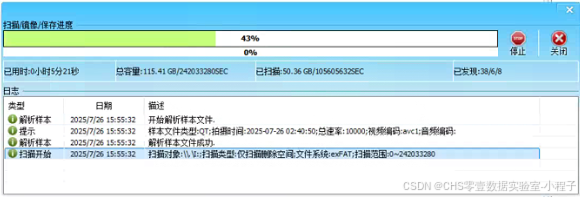
STEP3:扫描完成后直接查看数据,可以看到高级版已经列出了视频类型、级别、拍摄时间、摄像机型号、视频编码、时长、长度等参数,这些参数为查找数据提供了便利。经过对比成功恢复了需要的视频文件,至此恢复工作完成。(关于文件级别可以参考公众号或者博主的相关帖子)
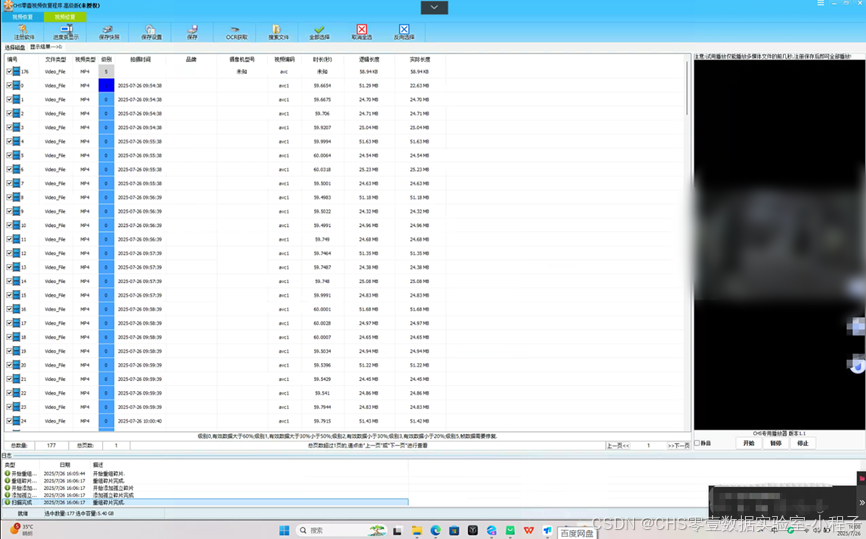
图5:CHS零壹视频恢复程序高级版扫描结果
这就是特斯拉(Tesla)行车记录仪视频文件“循环删除”的恢复方法,大家在遇到此类问题时,可以和CHS数据实验室联系!

















 990
990

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









