




大疆Osmo Pocket3采用性能强大的 1 英寸 CMOS、可快速切换横竖拍的 2 英寸旋转屏,配合全像素疾速对焦以及4K/120fps 超高拍摄规格和三轴云台机械增稳,让Pocket3武装到牙齿。今天我们来看看大疆(DJI)Osmo Pocket3存储卡格式化后的恢复方法。
故障存储:
型号:DJI Osmo Pocket3/存储大小:512GB/文件系统:exFat/簇大小:256KB
故障现象:
此存储卡由于需要被分了两个区,其中一个逻辑盘256GB用于Pocket3来存储视频文件,客户描述拍摄时由于操作出错导致把此逻辑盘误格式化,之后没有做其它操作。可以看到目前存储卡为空,有大约238GB剩余空间。
图1:格式化后的存储卡
故障分析:
DJI Osmo Pocket3在拍摄时会同时采集两种分辨率的视频文件,一种扩展名是MP4,一种是LRF,一般情况下我们是使用高级版添加样本文件进行扫描,这次我们使用另一种方法来扫描---CHS FS辅助功能。
故障处理:
视频类碎片恢复可以使用CHS零壹视频恢复程序高级版来扫描,操作方法也很简单。
STEP1:选择要扫描的逻辑盘点击右键->扫描大类选择“记录仪”->扫描小类选择 “大疆”->勾选CHS FS辅助->扫描
注意:CHS FS辅助在某些情况下可以有效恢复丢失的素材,如果此方法不行再添加样本扫描即可。
关于逻辑盘,逻辑盘是指文件系统非“RAW”的盘符,本例中是 “exFat”(图4)。
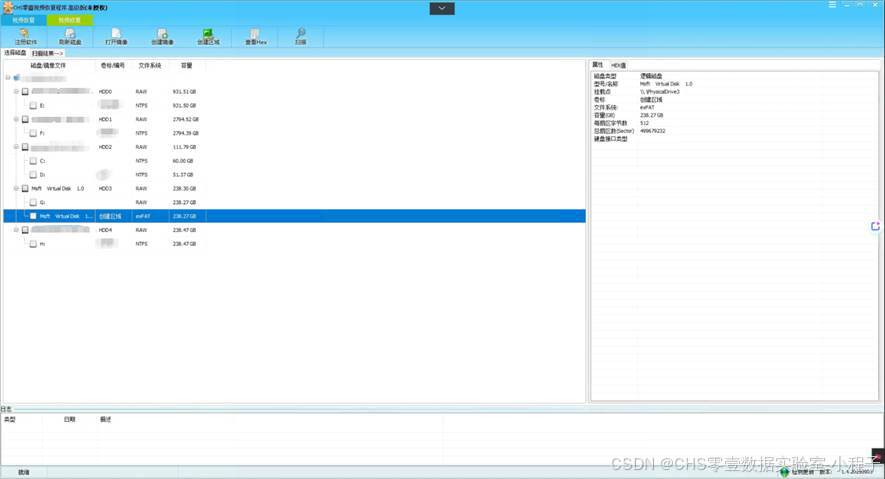
图2:选择exFAT逻辑盘
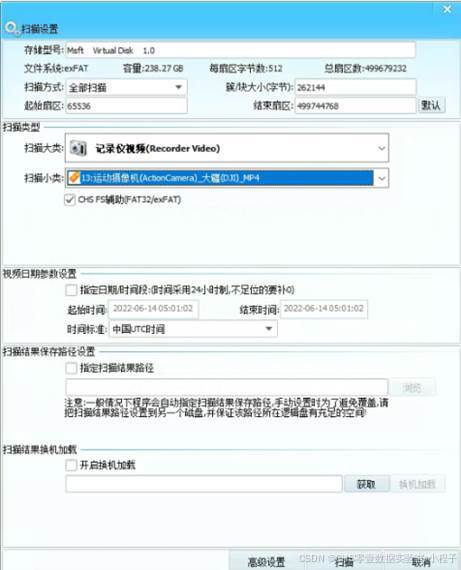
图3:扫描参数设置
STEP2:等待扫描完成

STEP3:扫描完成后直接查看数据,可以看到高级版已经列出了视频类型、级别、拍摄时间、摄像机型号、视频编码、时长、长度等参数,这些参数为查找数据提供了便利。可以看到程序成功找到了大约585条74.15GB左右的视频素材,经过和客户核对所有素材成功恢复,至此数据恢复工作完成!
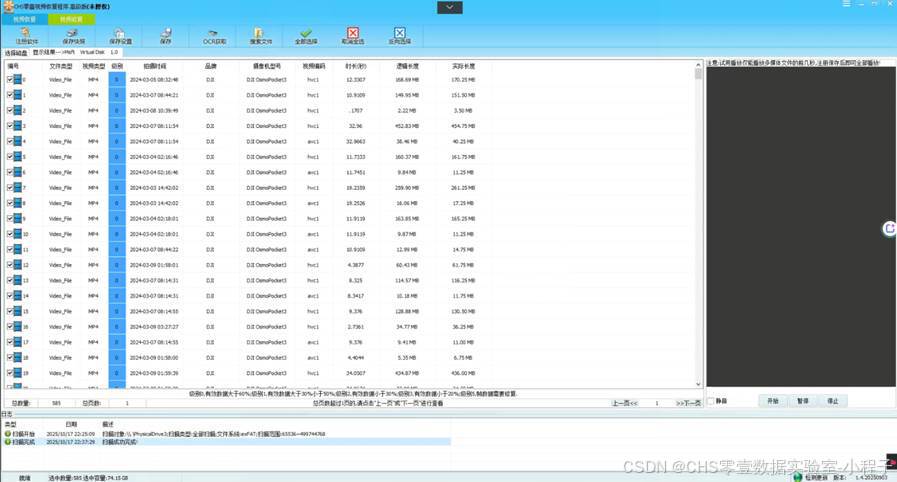
图5:CHS零壹视频恢复程序高级版扫描结果
这就是大疆(DJI) OSMO Pocket3手持云台误格式化后的恢复方法,大家在遇到此类问题时,可以和CHS数据实验室联系!

















 3700
3700

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









