






行车记录仪的出现解决了汽车行驶时音视频的采集问题,大多数第三方行车记录仪品牌仅需要安装一个TF存储卡就可以使用了。行车记录仪在方便大家的同时也会面临数据安全问题,因为存储设备是处于读/写(R/W)状态之下,而多数记录仪都遵循“自动删除、自动写入”的算法,这就是记录仪的循环删除。常见的记录仪一般是使用mp4文件,下边我们看一个使用avi文件的行车记录仪恢复案例。
故障存储:
16GBTF存储卡/文件系统:Fat32/簇大小:32KB
故障现象:
数据丢失的具体原因就是行车记录仪的“循环删除”,需要恢复所有删除空间中的avi视频文件。
故障分析:
开始前先来简单说下AVI文件,这算是视频格式中的“元老”了。AVI英文全称为Audio Video Interleaved,即音频视频交错格式,是微软公司于1992年11月推出、作为其Windows视频软件一部分的一种多媒体容器格式。不过在后来的多种视频PK中AVI败下阵来,最后输给了苹果公司的qt格式(qt格式别名是mp4),从文件结构上来讲,AVI的32位寻址方式“成功”的把视频文件的容量限制在4G以内,相对于qt格式的64位寻址方式算是一个巨大的“硬伤”。
而所谓“循环删除”是一种循环写入的机制,管理系统会在存储空间不够的时候优先删除较早日期的文件从而给新的文件“腾出”相应的空间。
当出现误操作后正确的操作方法是“断开存储设备和车机的物理连接”。而从图1可以看到这个优盘还有大约4.4GB的未使用空间,相对来讲剩余空间越大恢复的可能性就越高,不过此案例中客户的要求并非恢复指定某时间段的视频,而是全部恢复,所以直接扫描即可。
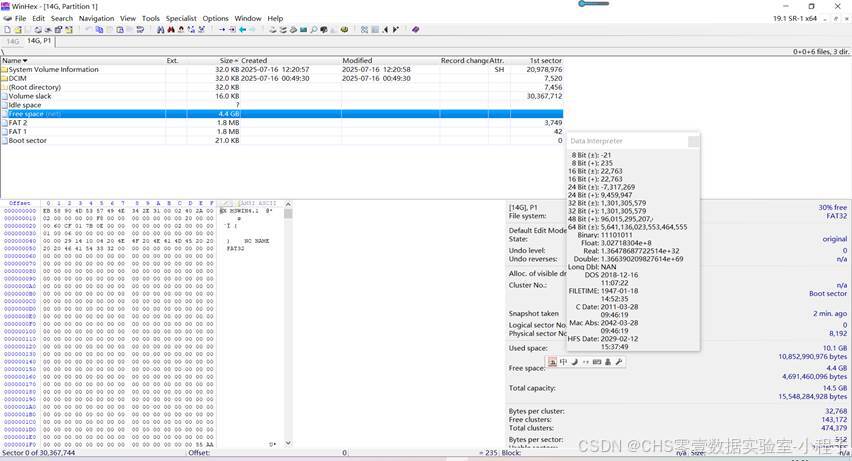
图1:剩余空间还有4.4GB
故障处理:
直接使用CHS零壹视频恢复程序高级版来扫描,操作方法也很简单。
STEP1:选择要扫描的逻辑盘点击右键->扫描方式选择“仅扫描删除空间”->扫描大类选择“记录仪”->点击路径选择样本文件->点击“扫描”即可。
关于样本文件:
强烈建议扫描时添加样本文件,程序会解析样本文件并根据其编码、结构、特征等参数建立精确模型,可以大大提高扫描时的定位精确度,做到“有的放矢”。(具体样本要求请参考博主”样本文件的使用方法以及注意事项”的帖子)
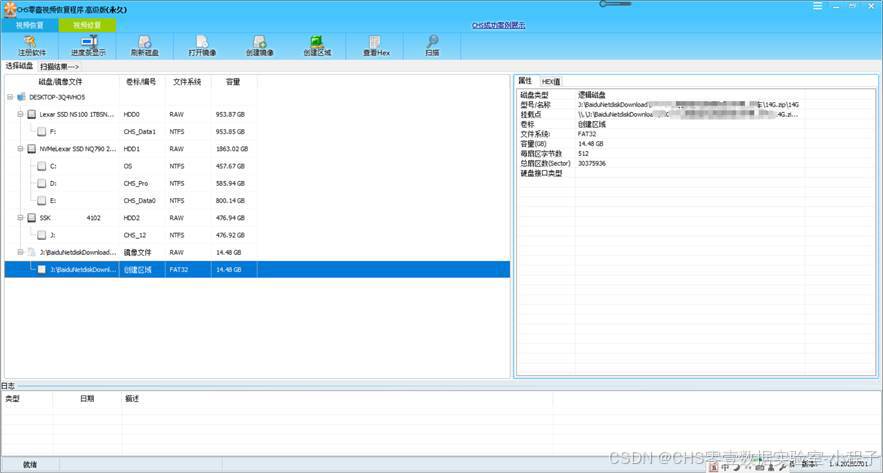
图2:选择fat32逻辑盘
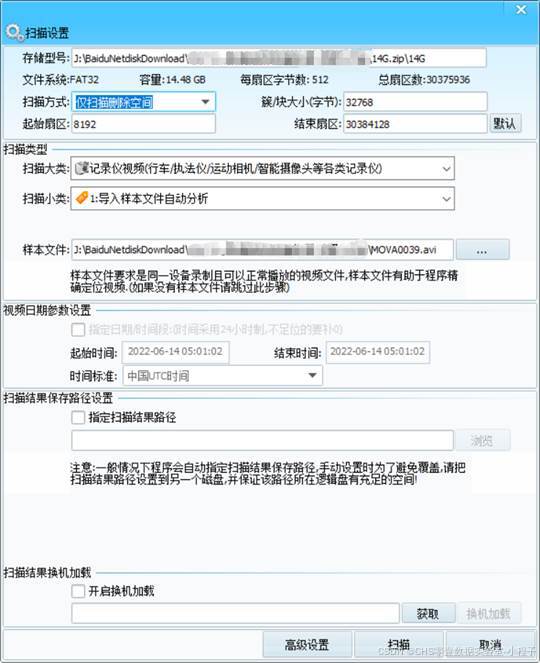
图3:添加正确的样本文件
STEP2:等待扫描完成,添加样本后程序会解析样本文件的各种参数(类型/拍摄时间 /速率/编码等),这些参数可以助力扫描算法精确定位同参数的视频文件。
STEP3:扫描完成后直接查看数据,可以看到高级版已经列出了视频类型、级别、拍摄时间、摄像机型号、视频编码、时长、长度等参数,这些参数为查找数据提供了便利。由于AVI文件并不记录拍摄时间、品牌等信息,所以找到的文件是没有这些参数的。而客户的要求是恢复所有删除空间中的视频,所以到这一步恢复工作基就完成了。
图4:CHS零壹视频恢复程序高级版扫描结果
STEP5:由于文件数量比较多,为了方便客户查找文件,所以进行了OCR操作。点击OCR然后点击开始,这样就可以获取画面中的时间了。
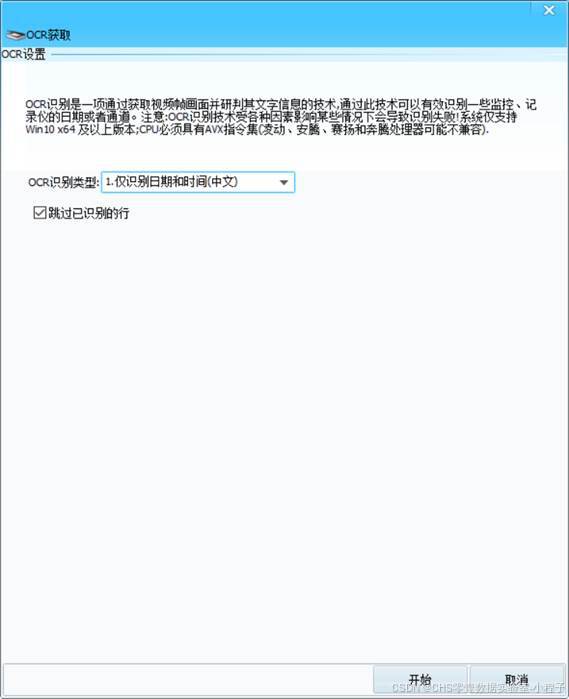
图5:点击开始进行OCR获取
STEP6:等待OCR完成。
STEP7:查看结果,可以看到不少文件已经成功识别到了画面时间,这样可以大大减轻客户的时间成本。
这就是行车记录仪AVI文件循环删除的恢复方法,大家在遇到此类问题时,可以和CHS数据实验室联系!

















 1257
1257

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









