




文章目录
多元函数微分学
可微的定义
设函数
f = f ( x , y ) f=f(x,y) f=f(x,y)
在点 ( x 0 , y 0 ) (x_0,y_0) (x0,y0) 的邻域内有定义。
我们说 f f f 在 ( x 0 , y 0 ) (x_0,y_0) (x0,y0) 可微,如果存在常数 A , B A,B A,B,使得当 ( h , k ) → ( 0 , 0 ) (h,k)\to(0,0) (h,k)→(0,0) 时:
f ( x 0 + h , y 0 + k ) − f ( x 0 , y 0 ) = A h + B k + o ( h 2 + k 2 ) . f(x_0+h,y_0+k)-f(x_0,y_0) =Ah+Bk + o\big(\sqrt{h^2+k^2}\big). f(x0+h,y0+k)−f(x0,y0)=Ah+Bk+o(h2+k2).
其中
o ( ρ ) 是 ρ = h 2 + k 2 的高阶无穷小 o(\rho) \text{ 是 }\rho=\sqrt{h^2+k^2}\text{ 的高阶无穷小} o(ρ) 是 ρ=h2+k2 的高阶无穷小
如果偏导数 f x , f y f_x,f_y fx,fy 在点存在,则可微条件可写成:
f ( x 0 + h , y 0 + k ) − f ( x 0 , y 0 ) = f x ( x 0 , y 0 ) h + f y ( x 0 , y 0 ) k + o ( h 2 + k 2 ) \boxed{ f(x_0+h,y_0+k)-f(x_0,y_0) = f_x(x_0,y_0)h + f_y(x_0,y_0)k + o(\sqrt{h^2+k^2}) } f(x0+h,y0+k)−f(x0,y0)=fx(x0,y0)h+fy(x0,y0)k+o(h2+k2)
即:
函数的增量 ≈ 线性部分 + 一个远小于距离的误差项。
线性部分就是函数的 线性近似(全微分):
d f = f x d x + f y d y . df = f_x\,dx + f_y\,dy. df=fxdx+fydy.
⭐ 一句话总结
多元函数在某点可微,表示:
函数在该点的增量能被一个线性函数(全微分)精确逼近,其误差比距离小得多。
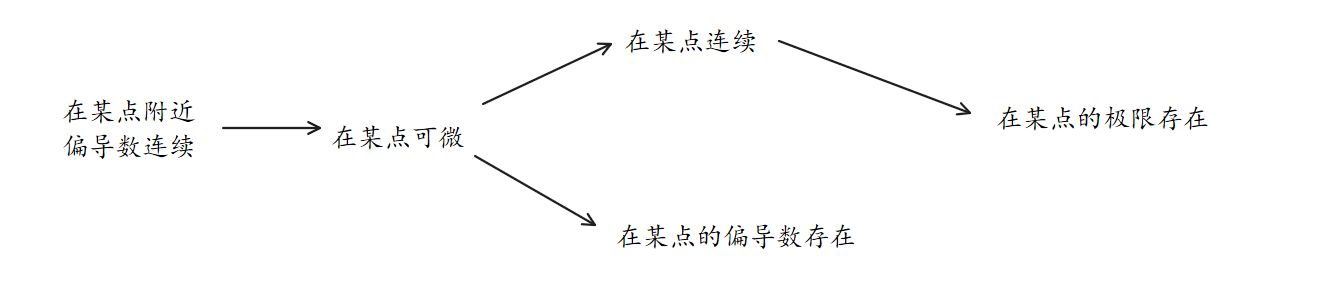
下面是多元函数微分学中几种常见说法的关系
如果一个二元函数在某点的两个偏导数都存在,请问能否推出他在该点连续?
不能!下面给你一个经典反例。
定义函数
f ( x , y ) = { x y x 2 + y 2 , ( x , y ) ≠ ( 0 , 0 ) , 0 , ( x , y ) = ( 0 , 0 ) . f(x,y)= \begin{cases} \frac{xy}{x^2+y^2}, & (x,y)\neq (0,0),\\[4pt] 0, & (x,y)=(0,0). \end{cases} f(x,y)={x2+y2xy,0,(x,y)=(0,0),(x,y)=(0,0).
我们检查它在 ( 0 , 0 ) (0,0) (0,0) 的偏导:
1️⃣ 计算 f x ( 0 , 0 ) f_x(0,0) fx(0,0)
f x ( 0 , 0 ) = lim h → 0 f ( h , 0 ) − f ( 0 , 0 ) h = lim h → 0 0 h = 0. f_x(0,0)=\lim_{h\to0}\frac{f(h,0)-f(0,0)}{h} =\lim_{h\to0}\frac{0}{h}=0. fx(0,0)=h→0limhf(h,0)−f(0,0)=h→0limh0=0.
2️⃣ 计算 f y ( 0 , 0 ) f_y(0,0) fy(0,0)
f y ( 0 , 0 ) = lim k → 0 f ( 0 , k ) − f ( 0 , 0 ) k = lim k → 0 0 k = 0. f_y(0,0)=\lim_{k\to0}\frac{f(0,k)-f(0,0)}{k} =\lim_{k\to0}\frac{0}{k}=0. fy(0,0)=k→0limkf(0,k)−f(0,0)=k→0limk0=0.
所以两个偏导数都存在,且都是 0。
但: f f f 在 ( 0 , 0 ) (0,0) (0,0) 不连续
沿直线 y = x y=x y=x 取极限:
f ( x , x ) = x ⋅ x x 2 + x 2 = 1 2 . f(x,x)=\frac{x\cdot x}{x^2+x^2}=\frac12. f(x,x)=x2+x2x⋅x=21.
显然
lim ( x , y ) → ( 0 , 0 ) f ( x , y ) \lim_{(x,y)\to(0,0)} f(x,y) (x,y)→(0,0)limf(x,y)
不存在(至少不等于 f ( 0 , 0 ) = 0 f(0,0)=0 f(0,0)=0)。
所以 f f f 在该点不连续。
⭐ 结论(必须记住)
二元函数在某点有偏导数是很弱的条件,不能推出连续,更不能推出可微。
梯度、散度、旋度
梯度
- 定义:设函数 z = f ( x , y ) z = f(x, y) z=f(x,y)在平面区域 D D D内具有一阶连续偏导数,则它在点 P ( x , y ) P(x, y) P(x,y)的梯度定义为向量 grad f ( x , y ) = ∂ f ∂ x i ⃗ + ∂ f ∂ y j ⃗ \text{grad}f(x, y) = \frac{\partial f}{\partial x}\vec{i} + \frac{\partial f}{\partial y}\vec{j} gradf(x,y)=∂x∂fi+∂y∂fj(对于三元函数 u = f ( x , y , z ) u = f(x, y, z) u=f(x,y,z),梯度为 grad u = ∂ u ∂ x i ⃗ + ∂ u ∂ y j ⃗ + ∂ u ∂ z k ⃗ \text{grad}u = \frac{\partial u}{\partial x}\vec{i} + \frac{\partial u}{\partial y}\vec{j} + \frac{\partial u}{\partial z}\vec{k} gradu=∂x∂ui+∂y∂uj+∂z∂uk)。
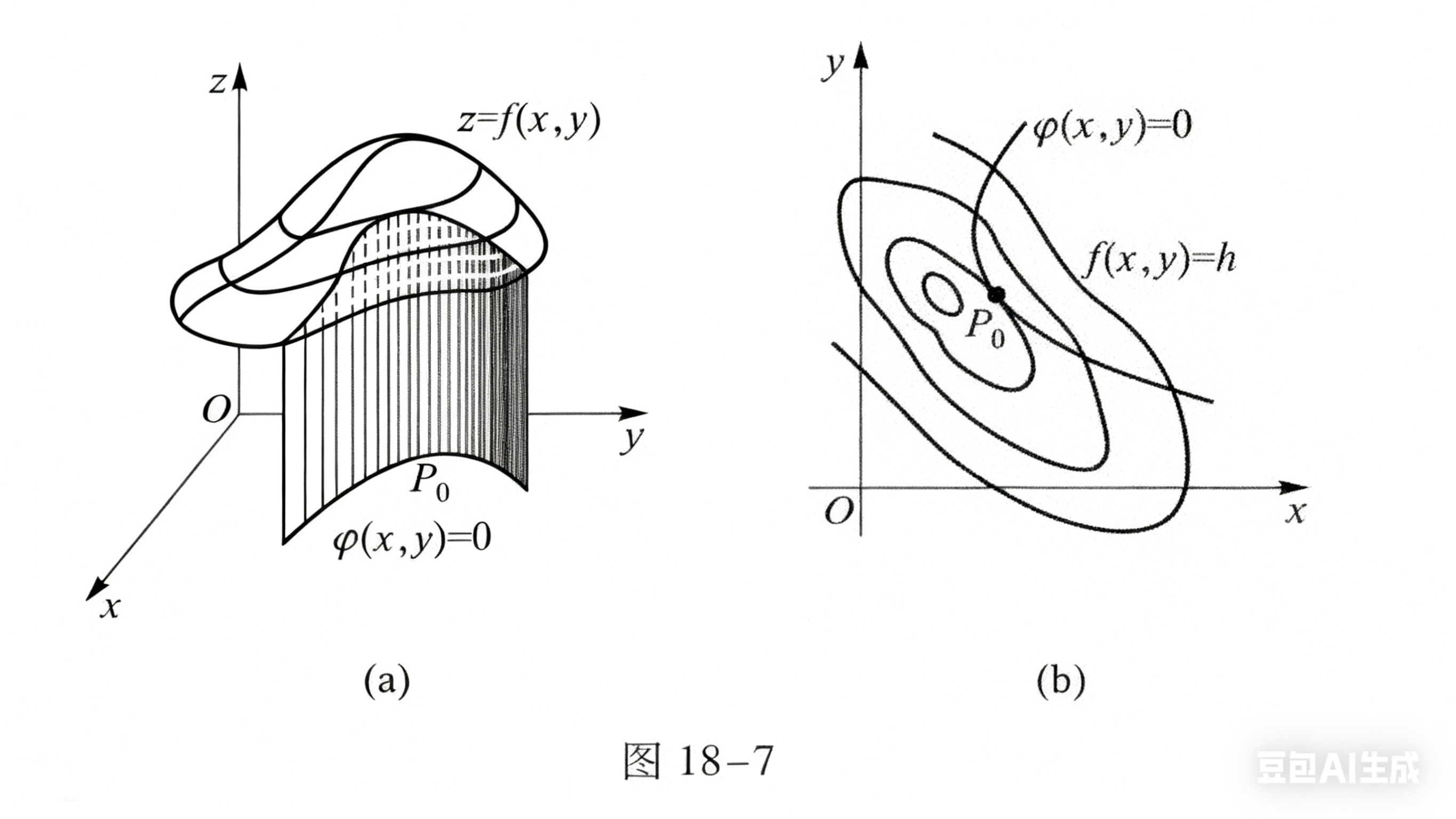
- 几何意义:梯度的方向是函数在该点增长最快的方向,其模长是函数在该方向上的最大变化率。例如,在等高线图中(如图18-7(b)),梯度方向垂直于等高线 f ( x , y ) = h f(x, y) = h f(x,y)=h,且指向函数值增大的一侧。
- 物理意义:可表示物理量(如温度、电势)的变化率方向,比如温度场中梯度方向是温度升高最快的方向。
散度
- 定义:设向量场 A ⃗ ( x , y , z ) = P ( x , y , z ) i ⃗ + Q ( x , y , z ) j ⃗ + R ( x , y , z ) k ⃗ \vec{A}(x, y, z) = P(x, y, z)\vec{i} + Q(x, y, z)\vec{j} + R(x, y, z)\vec{k} A(x,y,z)=P(x,y,z)i+Q(x,y,z)j+R(x,y,z)k,其中 P , Q , R P, Q, R P,Q,R具有一阶连续偏导数,则 A ⃗ \vec{A} A的散度定义为 div A ⃗ = ∂ P ∂ x + ∂ Q ∂ y + ∂ R ∂ z \text{div}\vec{A} = \frac{\partial P}{\partial x} + \frac{\partial Q}{\partial y} + \frac{\partial R}{\partial z} divA=∂x∂P+∂y∂Q+∂z∂R(也可表示为 ∇ ⋅ A ⃗ \nabla \cdot \vec{A} ∇⋅A,其中 ∇ = ∂ ∂ x i ⃗ + ∂ ∂ y j ⃗ + ∂ ∂ z k ⃗ \nabla = \frac{\partial}{\partial x}\vec{i} + \frac{\partial}{\partial y}\vec{j} + \frac{\partial}{\partial z}\vec{k} ∇=∂x∂i+∂y∂j+∂z∂k是哈密顿算子)。
- 物理意义:描述向量场在某点的“发散”或“汇聚”程度。若 div A ⃗ > 0 \text{div}\vec{A} > 0 divA>0,该点是“源”(如点电荷的电场在电荷处散度为正);若 div A ⃗ < 0 \text{div}\vec{A} < 0 divA<0,该点是“汇”;若 div A ⃗ = 0 \text{div}\vec{A} = 0 divA=0,则向量场是无源场(如磁场)。
旋度
- 定义:设向量场
A
⃗
(
x
,
y
,
z
)
=
P
(
x
,
y
,
z
)
i
⃗
+
Q
(
x
,
y
,
z
)
j
⃗
+
R
(
x
,
y
,
z
)
k
⃗
\vec{A}(x, y, z) = P(x, y, z)\vec{i} + Q(x, y, z)\vec{j} + R(x, y, z)\vec{k}
A(x,y,z)=P(x,y,z)i+Q(x,y,z)j+R(x,y,z)k,其中
P
,
Q
,
R
P, Q, R
P,Q,R具有一阶连续偏导数,则
A
⃗
\vec{A}
A的旋度定义为
rot A ⃗ = ( ∂ R ∂ y − ∂ Q ∂ z ) i ⃗ + ( ∂ P ∂ z − ∂ R ∂ x ) j ⃗ + ( ∂ Q ∂ x − ∂ P ∂ y ) k ⃗ \text{rot}\vec{A} = \left( \frac{\partial R}{\partial y} - \frac{\partial Q}{\partial z} \right)\vec{i} + \left( \frac{\partial P}{\partial z} - \frac{\partial R}{\partial x} \right)\vec{j} + \left( \frac{\partial Q}{\partial x} - \frac{\partial P}{\partial y} \right)\vec{k} rotA=(∂y∂R−∂z∂Q)i+(∂z∂P−∂x∂R)j+(∂x∂Q−∂y∂P)k
也可表示为 ∇ × A ⃗ \nabla \times \vec{A} ∇×A(哈密顿算子叉乘向量场)。 - 物理意义:描述向量场在某点的“旋转”强度和方向。旋度的方向由右手螺旋定则确定,模长表示单位面积上向量场的环量最大值。若 rot A ⃗ = 0 ⃗ \text{rot}\vec{A} = \vec{0} rotA=0,则向量场是无旋场(如保守力场,重力场、静电场都是无旋场);反之则是有旋场(如磁场、涡旋电场)。
方向导数
-
定义:设函数 z = f ( x , y ) z = f(x, y) z=f(x,y)在点 P ( x , y ) P(x, y) P(x,y)的某一邻域内有定义,自点 P P P引射线 l l l,在 l l l上取一点 P ′ ( x + Δ x , y + Δ y ) P'(x + \Delta x, y + \Delta y) P′(x+Δx,y+Δy),记 ρ = ( Δ x ) 2 + ( Δ y ) 2 \rho = \sqrt{(\Delta x)^2 + (\Delta y)^2} ρ=(Δx)2+(Δy)2。若极限 lim ρ → 0 f ( x + Δ x , y + Δ y ) − f ( x , y ) ρ \lim_{\rho \to 0} \frac{f(x + \Delta x, y + \Delta y) - f(x, y)}{\rho} limρ→0ρf(x+Δx,y+Δy)−f(x,y)存在,则称此极限为函数 f ( x , y ) f(x, y) f(x,y)在点 P P P沿方向 l l l的方向导数,记作 ∂ f ∂ l \frac{\partial f}{\partial l} ∂l∂f。对于三元函数 u = f ( x , y , z ) u = f(x, y, z) u=f(x,y,z),方向导数定义类似。
-
计算公式:若函数 f ( x , y ) f(x, y) f(x,y)在点 P ( x , y ) P(x, y) P(x,y)可微,方向 l l l的方向余弦为 cos α , cos β \cos\alpha, \cos\beta cosα,cosβ,则方向导数为
∂ f ∂ l = ∂ f ∂ x cos α + ∂ f ∂ y cos β \frac{\partial f}{\partial l} = \frac{\partial f}{\partial x}\cos\alpha + \frac{\partial f}{\partial y}\cos\beta ∂l∂f=∂x∂fcosα+∂y∂fcosβ
对于三元函数,公式扩展为 ∂ f ∂ l = ∂ f ∂ x cos α + ∂ f ∂ y cos β + ∂ f ∂ z cos γ \frac{\partial f}{\partial l} = \frac{\partial f}{\partial x}\cos\alpha + \frac{\partial f}{\partial y}\cos\beta + \frac{\partial f}{\partial z}\cos\gamma ∂l∂f=∂x∂fcosα+∂y∂fcosβ+∂z∂fcosγ(其中 cos α , cos β , cos γ \cos\alpha, \cos\beta, \cos\gamma cosα,cosβ,cosγ是方向 l l l的方向余弦)。 -
与梯度的关系:方向导数可表示为梯度与方向单位向量的点积,即 ∂ f ∂ l = grad f ⋅ e ⃗ l \frac{\partial f}{\partial l} = \text{grad}f \cdot \vec{e}_l ∂l∂f=gradf⋅el(其中 e ⃗ l \vec{e}_l el是方向 l l l的单位向量)。这说明梯度方向是方向导数最大的方向,且最大方向导数的值等于梯度的模长。
-
几何与物理意义:几何上表示函数在某点沿指定方向的变化率;物理上可用于描述物理量(如温度、浓度)沿特定方向的变化速率,例如温度场中某点沿风向的温度变化率可通过方向导数计算。
拉格朗日乘数法
什么是拉格朗日乘数法?拉格朗日乘数法用来干啥的?
拉格朗日乘数法解决的问题就是:多元函数在约束条件下的极值问题
在实际问题中,我们常常需要在“满足某些限制条件”的前提下,寻找目标函数的最大值或最小值。例如:
- 经济学中:在“成本固定”的约束下,最大化产量;或在“产量固定”的约束下,最小化成本。
- 物理学中:在“能量守恒”的约束下,寻找系统的稳定状态(势能极值)。
- 几何中:寻找“到原点距离最近的椭圆上的点”(目标函数:距离;约束条件:椭圆方程)。
约束条件下的极值问题的数学本质可分为两类
| 问题类型 | 数学形式 | 核心特点 |
|---|---|---|
| 单个等式约束 | 目标函数:
f
(
x
,
y
)
f(x,y)
f(x,y)(或多元函数) 约束条件: g ( x , y ) = 0 g(x,y)=0 g(x,y)=0 | 仅一个限制条件,且为等式 |
| 多个等式约束 | 目标函数:
f
(
x
,
y
,
z
)
f(x,y,z)
f(x,y,z)(或多元函数) 约束条件: g 1 ( x , y , z ) = 0 g_1(x,y,z)=0 g1(x,y,z)=0, g 2 ( x , y , z ) = 0 g_2(x,y,z)=0 g2(x,y,z)=0 | 多个限制条件,均为等式 |
如何用拉格朗日乘数法解决条件极值问题呢?
下面我们先以“二元函数+单个约束”为例,来具体说明如何使用拉格朗日乘数法(多元函数+多个等式约束的做法是类似的,你会二元函数+单个约束,就肯定会后面的)
步骤1:明确目标函数与约束条件
首先将实际问题转化为数学形式,确定:
- 目标函数 f ( x , y ) f(x,y) f(x,y)(需最大化或最小化的量);
- 约束条件 g ( x , y ) = 0 g(x,y)=0 g(x,y)=0(将约束等式整理为“右边=0”的形式)。
示例:寻找椭圆 x 2 + 2 y 2 = 1 x^2 + 2y^2 = 1 x2+2y2=1 上到原点距离最近的点(距离公式: d = x 2 + y 2 d=\sqrt{x^2+y^2} d=x2+y2,为简化计算,可令目标函数为 f ( x , y ) = x 2 + y 2 f(x,y)=x^2+y^2 f(x,y)=x2+y2,因 ⋅ \sqrt{\cdot} ⋅ 是单调函数, f ( x , y ) f(x,y) f(x,y) 与 d d d 的极值点一致)。
- 目标函数: f ( x , y ) = x 2 + y 2 f(x,y) = x^2 + y^2 f(x,y)=x2+y2(最小化);
- 约束条件: g ( x , y ) = x 2 + 2 y 2 − 1 = 0 g(x,y) = x^2 + 2y^2 - 1 = 0 g(x,y)=x2+2y2−1=0。
步骤2:构造拉格朗日函数
根据定义,引入乘数
λ
\lambda
λ,构建
L
(
x
,
y
,
λ
)
L(x,y,\lambda)
L(x,y,λ):
L
(
x
,
y
,
λ
)
=
f
(
x
,
y
)
−
λ
⋅
g
(
x
,
y
)
L(x,y,\lambda) = f(x,y) - \lambda \cdot g(x,y)
L(x,y,λ)=f(x,y)−λ⋅g(x,y)
示例:
L
(
x
,
y
,
λ
)
=
(
x
2
+
y
2
)
−
λ
⋅
(
x
2
+
2
y
2
−
1
)
L(x,y,\lambda) = (x^2 + y^2) - \lambda \cdot (x^2 + 2y^2 - 1)
L(x,y,λ)=(x2+y2)−λ⋅(x2+2y2−1)
步骤3:求偏导并建立方程组
对
L
L
L 分别求关于
x
,
y
,
λ
x,y,\lambda
x,y,λ 的偏导数,令偏导数等于0,得到方程组:
{
∂
L
∂
x
=
0
∂
L
∂
y
=
0
∂
L
∂
λ
=
0
\begin{cases} \frac{\partial L}{\partial x} = 0 \\ \frac{\partial L}{\partial y} = 0 \\ \frac{\partial L}{\partial \lambda} = 0 \end{cases}
⎩
⎨
⎧∂x∂L=0∂y∂L=0∂λ∂L=0
示例:
- ∂ L ∂ x = 2 x − 2 λ x = 0 \frac{\partial L}{\partial x} = 2x - 2\lambda x = 0 ∂x∂L=2x−2λx=0 → 2 x ( 1 − λ ) = 0 2x(1 - \lambda) = 0 2x(1−λ)=0 (1)
- ∂ L ∂ y = 2 y − 4 λ y = 0 \frac{\partial L}{\partial y} = 2y - 4\lambda y = 0 ∂y∂L=2y−4λy=0 → 2 y ( 1 − 2 λ ) = 0 2y(1 - 2\lambda) = 0 2y(1−2λ)=0 (2)
- ∂ L ∂ λ = − ( x 2 + 2 y 2 − 1 ) = 0 \frac{\partial L}{\partial \lambda} = -(x^2 + 2y^2 - 1) = 0 ∂λ∂L=−(x2+2y2−1)=0 → x 2 + 2 y 2 = 1 x^2 + 2y^2 = 1 x2+2y2=1 (3)
步骤4:解方程组并验证极值
解上述方程组,得到可能的极值点
(
x
,
y
)
(x,y)
(x,y),再通过实际意义或二阶导数判断其是否为最大值/最小值。
示例求解:
-
由方程(1): x = 0 x=0 x=0 或 λ = 1 \lambda=1 λ=1;
- 若 x = 0 x=0 x=0,代入方程(3): 0 + 2 y 2 = 1 0 + 2y^2 = 1 0+2y2=1 → y = ± 2 2 y=\pm \frac{\sqrt{2}}{2} y=±22,此时代入方程(2): 2 ⋅ ( ± 2 2 ) ⋅ ( 1 − 2 λ ) = 0 2 \cdot (\pm \frac{\sqrt{2}}{2}) \cdot (1 - 2\lambda) = 0 2⋅(±22)⋅(1−2λ)=0 → λ = 1 2 \lambda=\frac{1}{2} λ=21(有效),得到点 ( 0 , 2 2 ) (0, \frac{\sqrt{2}}{2}) (0,22) 和 ( 0 , − 2 2 ) (0, -\frac{\sqrt{2}}{2}) (0,−22),对应的 f ( x , y ) = 0 + ( 2 2 ) 2 = 1 2 f(x,y)=0 + (\frac{\sqrt{2}}{2})^2 = \frac{1}{2} f(x,y)=0+(22)2=21;
- 若 λ = 1 \lambda=1 λ=1,代入方程(2): 2 y ( 1 − 2 ⋅ 1 ) = − 2 y = 0 2y(1 - 2 \cdot 1) = -2y = 0 2y(1−2⋅1)=−2y=0 → y = 0 y=0 y=0,再代入方程(3): x 2 = 1 x^2 = 1 x2=1 → x = ± 1 x=\pm 1 x=±1,得到点 ( 1 , 0 ) (1,0) (1,0) 和 ( − 1 , 0 ) (-1,0) (−1,0),对应的 f ( x , y ) = 1 + 0 = 1 f(x,y)=1 + 0 = 1 f(x,y)=1+0=1。
-
验证极值:因 f ( x , y ) f(x,y) f(x,y) 表示距离的平方, 1 2 < 1 \frac{1}{2} < 1 21<1,故 ( 0 , ± 2 2 ) (0, \pm \frac{\sqrt{2}}{2}) (0,±22) 是“到原点最近的点”,最近距离为 1 2 = 2 2 \sqrt{\frac{1}{2}} = \frac{\sqrt{2}}{2} 21=22。
为什么我用拉格朗日乘数法能找到极值?
要理解原理,我们先从二元函数+单个约束的简单场景切入,再推广到多元情况。
1. 极值问题的几何本质:梯度平行
假设我们要解决:
- 目标函数: z = f ( x , y ) z=f(x,y) z=f(x,y)(可理解为三维空间中的曲面,其等高线为平面上的曲线族 f ( x , y ) = c f(x,y)=c f(x,y)=c, c c c 为常数);
- 约束条件: g ( x , y ) = 0 g(x,y)=0 g(x,y)=0(可理解为平面上的一条曲线,即“约束曲线”)。
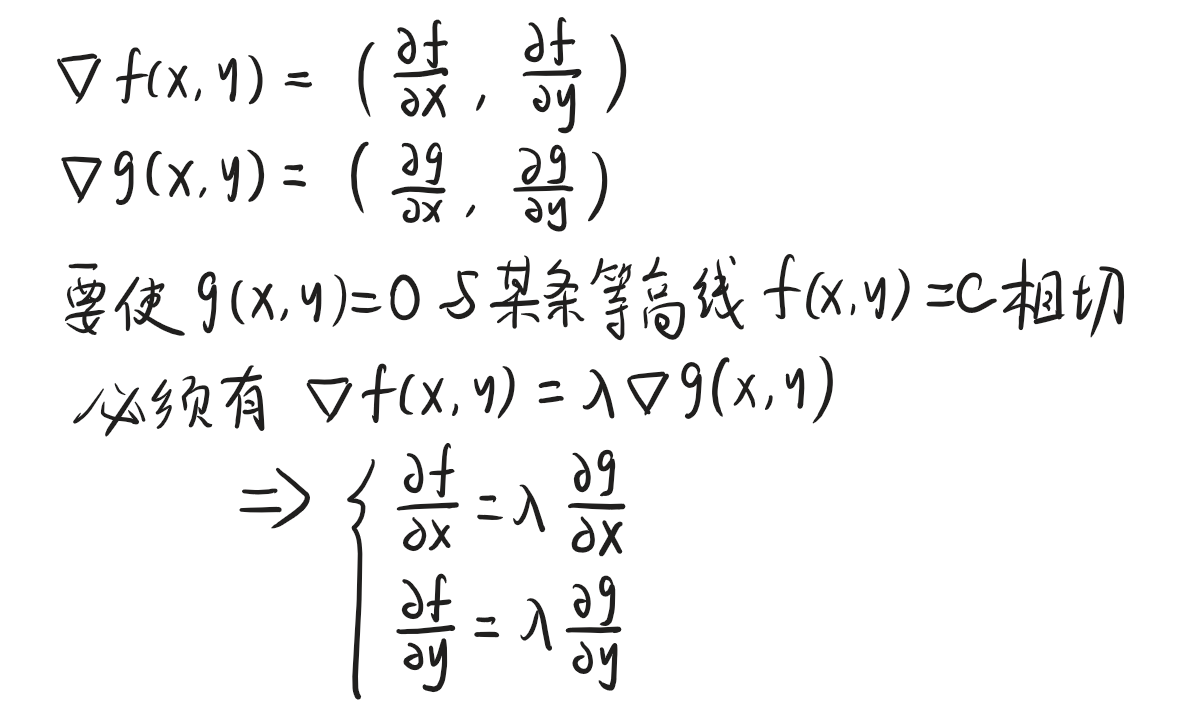
我们的目标是找到约束曲线 g ( x , y ) = 0 g(x,y)=0 g(x,y)=0 与某条等高线 f ( x , y ) = c f(x,y)=c f(x,y)=c 的切点——因为只有在切点处,目标函数 f ( x , y ) f(x,y) f(x,y) 才能取得极值:
- 若两者相交(非相切),则沿约束曲线移动时, f ( x , y ) f(x,y) f(x,y) 的值会继续增大或减小,未达极值;
- 若两者相切,则在该点处,等高线 f ( x , y ) = c f(x,y)=c f(x,y)=c 与约束曲线 g ( x , y ) = 0 g(x,y)=0 g(x,y)=0 的切线方向一致,即它们的法向量平行。
而函数的梯度(
∇
f
\nabla f
∇f、
∇
g
\nabla g
∇g)正是其等高线(或约束曲线)的法向量。因此,“法向量平行”可转化为数学等式:
∇
f
(
x
,
y
)
=
λ
⋅
∇
g
(
x
,
y
)
\nabla f(x,y) = \lambda \cdot \nabla g(x,y)
∇f(x,y)=λ⋅∇g(x,y)
其中
λ
\lambda
λ 就是拉格朗日乘数(非零常数,用于表示两个梯度的比例关系)。
定义拉格朗日函数之后,其实把上面的式子整理整理,就是我们用到的拉格朗日乘数法
2. 拉格朗日函数:将约束问题转化为无约束问题
为了统一求解目标函数和约束条件,我们定义拉格朗日函数
L
(
x
,
y
,
λ
)
L(x,y,\lambda)
L(x,y,λ):
L
(
x
,
y
,
λ
)
=
f
(
x
,
y
)
−
λ
⋅
g
(
x
,
y
)
L(x,y,\lambda) = f(x,y) - \lambda \cdot g(x,y)
L(x,y,λ)=f(x,y)−λ⋅g(x,y)
此时,“原约束问题的极值点”等价于“拉格朗日函数
L
L
L 关于
x
,
y
,
λ
x,y,\lambda
x,y,λ 的无约束极值点”。原因是:
对
L
L
L 分别求关于
x
,
y
,
λ
x,y,\lambda
x,y,λ 的偏导数,并令其等于0,得到的方程组与“梯度平行+约束条件”完全一致:
- ∂ L ∂ x = ∂ f ∂ x − λ ⋅ ∂ g ∂ x = 0 \frac{\partial L}{\partial x} = \frac{\partial f}{\partial x} - \lambda \cdot \frac{\partial g}{\partial x} = 0 ∂x∂L=∂x∂f−λ⋅∂x∂g=0 → ∂ f ∂ x = λ ⋅ ∂ g ∂ x \frac{\partial f}{\partial x} = \lambda \cdot \frac{\partial g}{\partial x} ∂x∂f=λ⋅∂x∂g
- ∂ L ∂ y = ∂ f ∂ y − λ ⋅ ∂ g ∂ y = 0 \frac{\partial L}{\partial y} = \frac{\partial f}{\partial y} - \lambda \cdot \frac{\partial g}{\partial y} = 0 ∂y∂L=∂y∂f−λ⋅∂y∂g=0 → ∂ f ∂ y = λ ⋅ ∂ g ∂ y \frac{\partial f}{\partial y} = \lambda \cdot \frac{\partial g}{\partial y} ∂y∂f=λ⋅∂y∂g
- ∂ L ∂ λ = − g ( x , y ) = 0 \frac{\partial L}{\partial \lambda} = -g(x,y) = 0 ∂λ∂L=−g(x,y)=0 → g ( x , y ) = 0 g(x,y) = 0 g(x,y)=0(即原约束条件)
3. 推广到多元函数与多个约束
若目标函数为
n
n
n 元函数
f
(
x
1
,
x
2
,
.
.
.
,
x
n
)
f(x_1,x_2,...,x_n)
f(x1,x2,...,xn),且存在
k
k
k 个等式约束
g
1
(
x
1
,
.
.
.
,
x
n
)
=
0
,
g
2
(
x
1
,
.
.
.
,
x
n
)
=
0
,
.
.
.
,
g
k
(
x
1
,
.
.
.
,
x
n
)
=
0
g_1(x_1,...,x_n)=0, g_2(x_1,...,x_n)=0, ..., g_k(x_1,...,x_n)=0
g1(x1,...,xn)=0,g2(x1,...,xn)=0,...,gk(x1,...,xn)=0(
k
<
n
k < n
k<n,否则约束过多可能无解),则:
- 需引入 k k k 个拉格朗日乘数 λ 1 , λ 2 , . . . , λ k \lambda_1, \lambda_2, ..., \lambda_k λ1,λ2,...,λk;
- 拉格朗日函数定义为:
L ( x 1 , . . . , x n , λ 1 , . . . , λ k ) = f ( x 1 , . . . , x n ) − ∑ i = 1 k λ i ⋅ g i ( x 1 , . . . , x n ) L(x_1,...,x_n,\lambda_1,...,\lambda_k) = f(x_1,...,x_n) - \sum_{i=1}^k \lambda_i \cdot g_i(x_1,...,x_n) L(x1,...,xn,λ1,...,λk)=f(x1,...,xn)−i=1∑kλi⋅gi(x1,...,xn) - 极值点满足的条件:对 L L L 中所有变量( x 1 , . . . , x n x_1,...,x_n x1,...,xn 和 λ 1 , . . . , λ k \lambda_1,...,\lambda_k λ1,...,λk)求偏导,并令其等于0,共 n + k n+k n+k 个方程,可解出 n + k n+k n+k 个未知数。
求函数 f ( x , y ) = ∣ x ∣ + ∣ y ∣ x 2 + y 2 f(x,y)=\frac{|x|+|y|}{\sqrt{x^2+y^2}} f(x,y)=x2+y2∣x∣+∣y∣的值域
⭐ 第一步:化到极坐标
设
x = r cos θ , y = r sin θ , r > 0 x=r\cos\theta,\qquad y=r\sin\theta, \quad r>0 x=rcosθ,y=rsinθ,r>0
则
∣ x ∣ + ∣ y ∣ = r ( ∣ cos θ ∣ + ∣ sin θ ∣ ) |x|+|y|=r(|\cos\theta|+|\sin\theta|) ∣x∣+∣y∣=r(∣cosθ∣+∣sinθ∣)
x 2 + y 2 = r \sqrt{x^2+y^2}=r x2+y2=r
所以函数变为仅与角度有关的:
f ( θ ) = ∣ cos θ ∣ + ∣ sin θ ∣ f(\theta)=|\cos\theta|+|\sin\theta| f(θ)=∣cosθ∣+∣sinθ∣
在第一象限( cos θ , sin θ ≥ 0 \cos\theta,\sin\theta\ge 0 cosθ,sinθ≥0):
f ( θ ) = cos θ + sin θ = 2 sin ( θ + π 4 ) f(\theta)=\cos\theta+\sin\theta = \sqrt{2}\,\sin(\theta+\frac{\pi}{4}) f(θ)=cosθ+sinθ=2sin(θ+4π)
所以最大值为:
2 \boxed{\sqrt{2}} 2
发生在 θ = π 4 \theta = \frac{\pi}{4} θ=4π(即 x = y > 0 x=y>0 x=y>0)及其对称方向。
在第一象限的最小值发生在 θ = 0 \theta=0 θ=0 或 θ = π 2 \theta=\frac{\pi}{2} θ=2π:
f = 1 f = 1 f=1
并且由于绝对值对称,其他象限也一样。
最终结论
1 ≤ ∣ x ∣ + ∣ y ∣ x 2 + y 2 ≤ 2 ( x , y ≠ 0 ) \boxed{1 \;\le\; \frac{|x|+|y|}{\sqrt{x^2+y^2}} \;\le\; \sqrt{2}} \quad (x,y\neq 0) 1≤x2+y2∣x∣+∣y∣≤2(x,y=0)
求曲线 Γ : { x 2 + y 2 + z 2 = 3 x + y − z = 1. \Gamma:\quad \begin{cases}x^{2}+y^{2}+z^{2}=3\\[4pt]x+y-z=1.\end{cases} Γ:{x2+y2+z2=3x+y−z=1.上某一点的方向向量
曲线 Γ \Gamma Γ是两个曲面:
- F ( x , y , z ) = x 2 + y 2 + z 2 − 3 = 0 F(x,y,z)=x^{2}+y^{2}+z^{2}-3=0 F(x,y,z)=x2+y2+z2−3=0
- G ( x , y , z ) = x + y − z − 1 = 0 G(x,y,z)=x+y-z-1=0 G(x,y,z)=x+y−z−1=0
的交线。在该交线上的任一点,其切向量方向等于两个曲面在该点的法向量的叉积:
t = ∇ F × ∇ G \boxed{\, \mathbf{t}=\nabla F \times \nabla G\, } t=∇F×∇G
因为交线方向同时垂直于两个法向量,因此是法向量叉积。
计算梯度
F ( x , y , z ) = x 2 + y 2 + z 2 − 3 F(x,y,z) = x^2 + y^2 + z^2 - 3 F(x,y,z)=x2+y2+z2−3
∇ F = ( 2 x , 2 y , 2 z ) \nabla F = (2x,\;2y,\;2z) ∇F=(2x,2y,2z)
G ( x , y , z ) = x + y − z − 1 G(x,y,z) = x + y - z - 1 G(x,y,z)=x+y−z−1
∇ G = ( 1 , 1 , − 1 ) \nabla G = (1,\;1,\;-1) ∇G=(1,1,−1)
计算切向量(未单位化)
t = ∇ F × ∇ G = ( 2 x , 2 y , 2 z ) × ( 1 , 1 , − 1 ) \mathbf{t} = \nabla F \times \nabla G = (2x,2y,2z) \times (1,1,-1) t=∇F×∇G=(2x,2y,2z)×(1,1,−1)
直接算叉积:
t = ∣ i j k 2 x 2 y 2 z 1 1 − 1 ∣ \mathbf{t} =\begin{vmatrix} \mathbf{i} & \mathbf{j} & \mathbf{k} \\ 2x & 2y & 2z \\ 1 & 1 & -1 \end{vmatrix} t= i2x1j2y1k2z−1
= i ( 2 y ⋅ ( − 1 ) − 2 z ⋅ 1 ) − j ( 2 x ⋅ ( − 1 ) − 2 z ⋅ 1 ) + k ( 2 x ⋅ 1 − 2 y ⋅ 1 ) =\mathbf{i}(2y\cdot(-1)-2z\cdot 1) -\mathbf{j}(2x\cdot(-1)-2z\cdot1) +\mathbf{k}(2x\cdot1-2y\cdot1) =i(2y⋅(−1)−2z⋅1)−j(2x⋅(−1)−2z⋅1)+k(2x⋅1−2y⋅1)
简化:
t = ( − 2 y − 2 z , 2 x − 2 z , 2 x − 2 y ) \boxed{ \mathbf{t} = (-2y-2z,\; 2x-2z,\; 2x-2y ) } t=(−2y−2z,2x−2z,2x−2y)
这就是曲线上任一点的 切向量方向。
求在某个指定点 P ( x 0 , y 0 , z 0 ) P(x_0,y_0,z_0) P(x0,y0,z0) 处的方向向量
只需把坐标代入:
t ( P ) = ( − 2 y 0 − 2 z 0 , 2 x 0 − 2 z 0 , 2 x 0 − 2 y 0 ) \boxed{ \mathbf{t}(P)=(-2y_0-2z_0,\;2x_0-2z_0,\;2x_0-2y_0) } t(P)=(−2y0−2z0,2x0−2z0,2x0−2y0)
隐函数定理
二元函数的隐函数存在定理
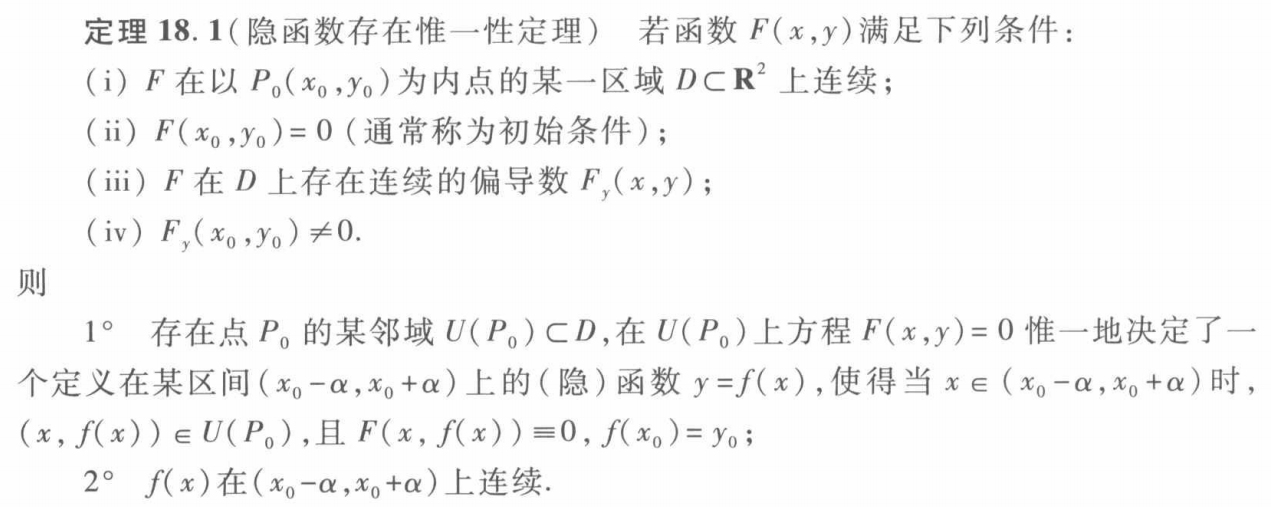
原汁原味版:
我自己理解的版本
上面这四个条件,我们可以总结为:
- F ( x , y ) F(x,y) F(x,y)在 P 0 ( x 0 , y 0 ) P_0(x_0,y_0) P0(x0,y0)处连续,且 F ( x 0 , y 0 ) = 0 F(x_0,y_0)=0 F(x0,y0)=0
- F y ( x , y ) F_y(x,y) Fy(x,y)在 P 0 ( x 0 , y 0 ) P_0(x_0,y_0) P0(x0,y0)处连续,且 F y ( x 0 , y 0 ) ≠ 0 F_y(x_0,y_0)\neq0 Fy(x0,y0)=0
然后结论就是
- 在区间 ( x 0 − α , x 0 + α ) (x_0-\alpha,x_0+\alpha) (x0−α,x0+α)上的存在隐函数 y = f ( x ) y=f(x) y=f(x)
- y = f ( x ) y=f(x) y=f(x)在区间 ( x 0 − α , x 0 + α ) (x_0-\alpha,x_0+\alpha) (x0−α,x0+α)上连续
隐函数定理有啥用?
如果我们通过前面的隐函数定理,判断在曲线的某点附近存在隐函数,那么就可以利用 F ( x , y ) F(x,y) F(x,y)的表达式,求出隐函数在该点处的导数(通过隐函数可微性定理,不用知道隐函数 y = f ( x ) y=f(x) y=f(x)的表达式)

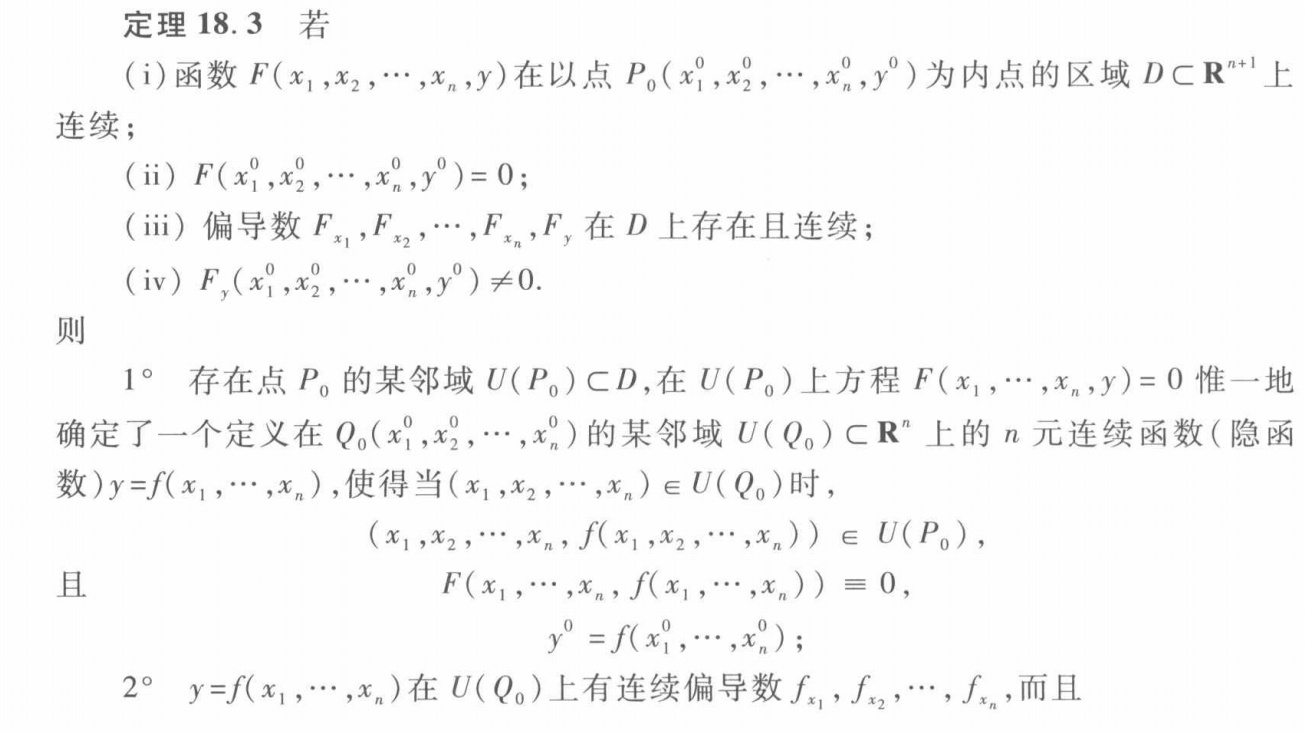
多元函数的隐函数定理
原汁原味版
我自己理解的版本:
上面这四个条件,我们可以总结为:
- F ( x 1 , x 2 , . . . , x n , y ) F(x_1,x_2,...,x_n,y) F(x1,x2,...,xn,y)在 P 0 P_0 P0处连续,且 F ( P 0 ) = 0 F(P_0)=0 F(P0)=0
- F ( x 1 , x 2 , . . . , x n , y ) F(x_1,x_2,...,x_n,y) F(x1,x2,...,xn,y)的任意一阶偏导数( F x 1 , F x 2 , . . . , F x n , F y F_{x_1},F_{x_2},...,F_{x_n},F_{y} Fx1,Fx2,...,Fxn,Fy)在 P 0 ( x 0 , y 0 ) P_0(x_0,y_0) P0(x0,y0)处都是连续的
- F y ( x 0 , y 0 ) ≠ 0 F_y(x_0,y_0)\neq0 Fy(x0,y0)=0
然后结论就是
- 在 U ( P 0 ) U(P_0) U(P0)内存在隐函数 y = f ( x 1 , x 2 , . . . , x n ) y=f(x_1,x_2,...,x_n) y=f(x1,x2,...,xn)
- y = f ( x 1 , x 2 , . . . , x n ) y=f(x_1,x_2,...,x_n) y=f(x1,x2,...,xn)在 P 0 P_0 P0附近连续,且任意一阶偏导数( y x 1 , y x 2 , . . . , y x n y_{x_1},y_{x_2},...,y_{x_n} yx1,yx2,...,yxn)都存在且连续
如果我们通过上面隐函数存在定理,已经确定存在隐函数
y
=
f
(
x
1
,
x
2
,
.
.
.
,
x
n
)
y=f(x_1,x_2,...,x_n)
y=f(x1,x2,...,xn),那我们就可以通过下面的公式来计算该隐函数的一阶偏导数
f
x
1
=
−
F
x
1
F
y
,
f
x
2
=
−
F
x
2
F
y
,
⋯
,
f
x
n
=
−
F
x
n
F
y
f_{x_1}=-\frac{F_{x_1}}{F_y},\ f_{x_2}=-\frac{F_{x_2}}{F_y},\cdots,f_{x_n}=-\frac{F_{x_n}}{F_y}
fx1=−FyFx1, fx2=−FyFx2,⋯,fxn=−FyFxn
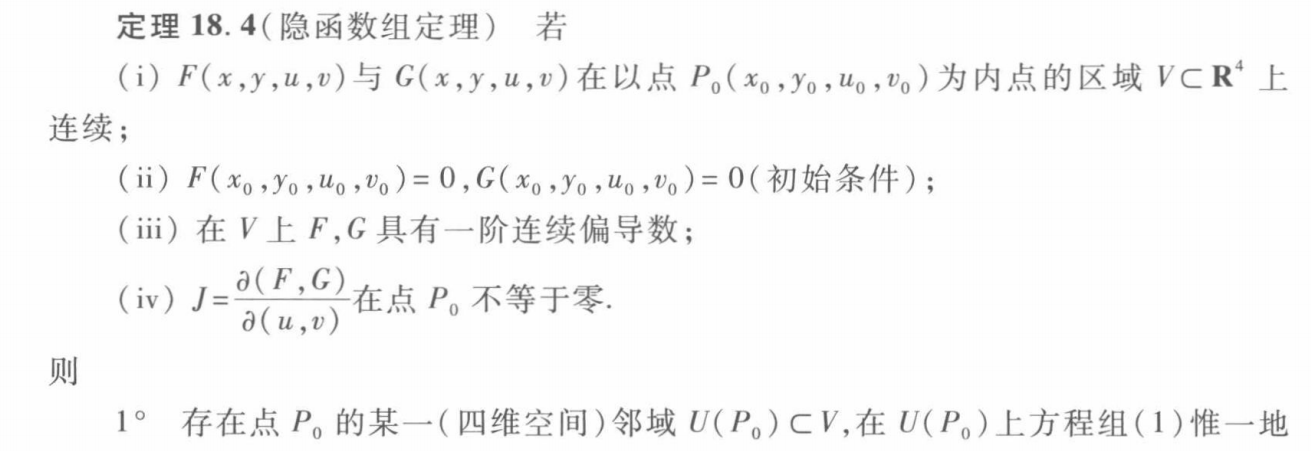
隐函数组定理
原汁原味版
我自己理解的版本:
上面这四个条件,我们可以总结为:
- F ( x , y , u , v ) F(x,y,u,v) F(x,y,u,v)和 G ( x , y , u , v ) G(x,y,u,v) G(x,y,u,v)在 P 0 ( x 0 , y 0 , u 0 . z 0 ) P_0(x_0,y_0,u_0.z_0) P0(x0,y0,u0.z0)处连续,且 F ( P 0 ) = G ( P 0 ) = 0 F(P_0)=G(P_0)=0 F(P0)=G(P0)=0
- F F F的任意一阶偏导数( F x , F y , F u , F v F_{x},F_{y},F_{u},F_{v} Fx,Fy,Fu,Fv)和 G G G的任意一阶偏导数在 P 0 P_0 P0处都是连续的
- J = ∂ ( F , G ) ∂ ( u , v ) ≠ 0 J=\frac{\partial(F,G)}{\partial(u,v)}\neq0 J=∂(u,v)∂(F,G)=0,其中
J = ∂ ( F , G ) ∂ ( u , v ) = ∣ ∂ F ∂ u ∂ F ∂ v ∂ G ∂ u ∂ G ∂ v ∣ J=\frac{\partial(F,G)}{\partial(u,v)}=\begin{vmatrix} \frac{\partial F}{\partial u} & \frac{\partial F}{\partial v} \\ \frac{\partial G}{\partial u} & \frac{\partial G}{\partial v} \end{vmatrix} J=∂(u,v)∂(F,G)= ∂u∂F∂u∂G∂v∂F∂v∂G
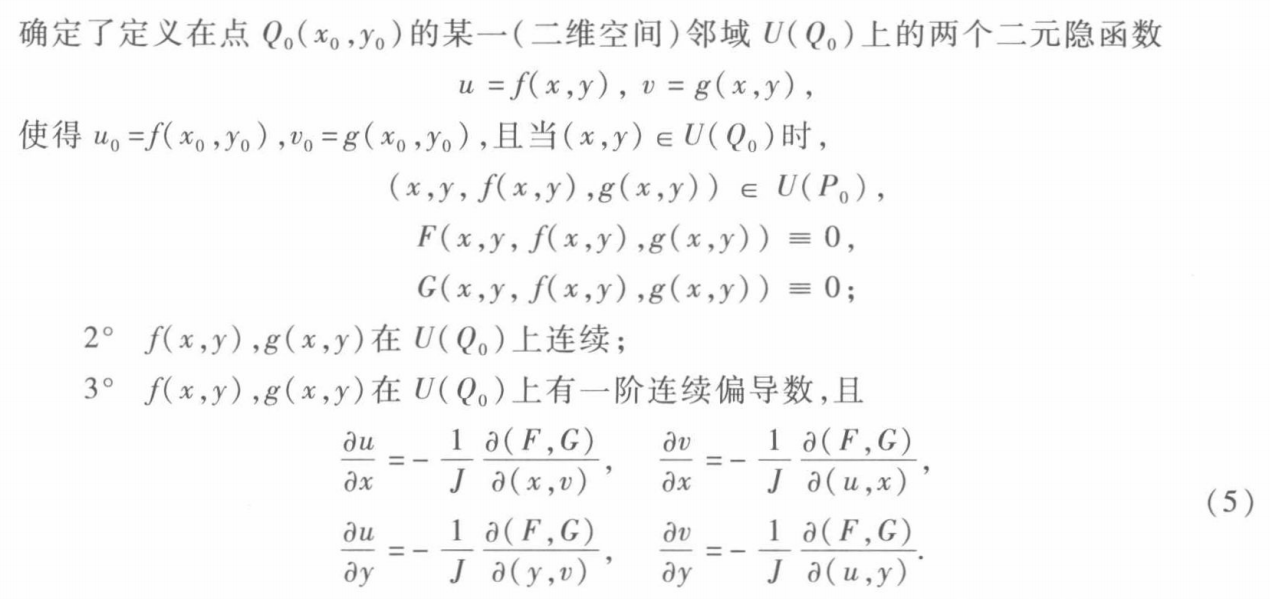
结论就是
- 在 U ( P 0 ) U(P_0) U(P0)内存在隐函数 u = f ( x , y ) , v = g ( x , y ) u=f(x,y),v=g(x,y) u=f(x,y),v=g(x,y)
- u = f ( x , y ) , v = g ( x , y ) u=f(x,y),v=g(x,y) u=f(x,y),v=g(x,y)在 U ( P 0 ) U(P_0) U(P0)内连续,且存在连续一阶偏导数
如果我们通过上面隐函数存在定理,已经确定存在隐函数 u = f ( x , y ) , v = g ( x , y ) u=f(x,y),v=g(x,y) u=f(x,y),v=g(x,y),那我们就可以通过下面的公式来计算该隐函数的一阶偏导数
∂ u ∂ x = − ∂ ( F , G ) ∂ ( x , v ) ∂ ( F , G ) ∂ ( u , v ) , ∂ v ∂ x = − ∂ ( F , G ) ∂ ( u , x ) ∂ ( F , G ) ∂ ( u , v ) \frac{\partial u}{\partial x} = -\frac{\frac{\partial(F,G)}{\partial(x,v)}}{\frac{\partial(F,G)}{\partial(u,v)}},\frac{\partial v}{\partial x} = -\frac{\frac{\partial(F,G)}{\partial(u,x)}}{\frac{\partial(F,G)}{\partial(u,v)}} ∂x∂u=−∂(u,v)∂(F,G)∂(x,v)∂(F,G),∂x∂v=−∂(u,v)∂(F,G)∂(u,x)∂(F,G)
∂ u ∂ y = − ∂ ( F , G ) ∂ ( y , v ) ∂ ( F , G ) ∂ ( u , v ) , ∂ v ∂ y = − ∂ ( F , G ) ∂ ( u , y ) ∂ ( F , G ) ∂ ( u , v ) \frac{\partial u}{\partial y} = -\frac{\frac{\partial(F,G)}{\partial(y,v)}}{\frac{\partial(F,G)}{\partial(u,v)}},\frac{\partial v}{\partial y} = -\frac{\frac{\partial(F,G)}{\partial(u,y)}}{\frac{\partial(F,G)}{\partial(u,v)}} ∂y∂u=−∂(u,v)∂(F,G)∂(y,v)∂(F,G),∂y∂v=−∂(u,v)∂(F,G)∂(u,y)∂(F,G)
反函数组定理
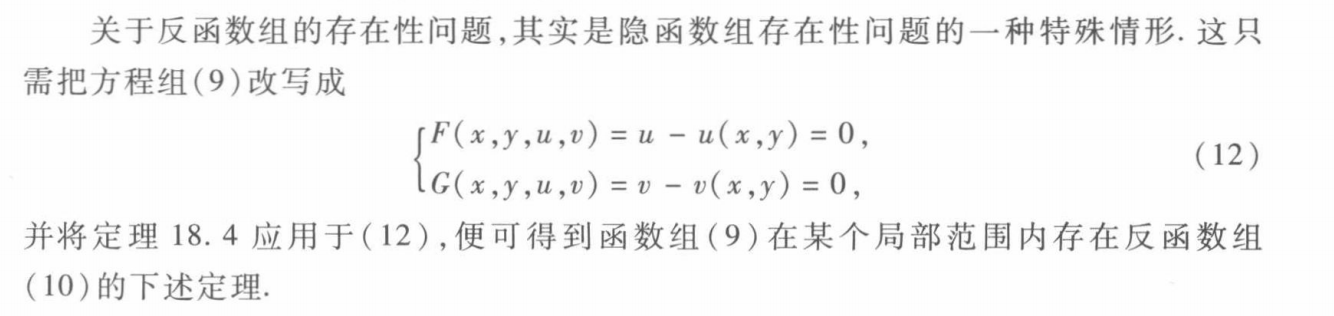

反函数的单调性
只要 y = f ( x ) y=f(x) y=f(x)在 ( a , b ) (a,b) (a,b)内存在反函数 x = f − 1 ( y ) x=f^{-1}(y) x=f−1(y),则 y = f ( x ) y=f(x) y=f(x)和 x = f − 1 ( y ) x=f^{-1}(y) x=f−1(y)在 ( a , b ) (a,b) (a,b)内都是单调的

















 1298
1298

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









