ROS2中将IMU数据可视化
 ROS2中实现IMU数据可视化
ROS2中实现IMU数据可视化





于 2024-01-03 00:09:45 首次发布
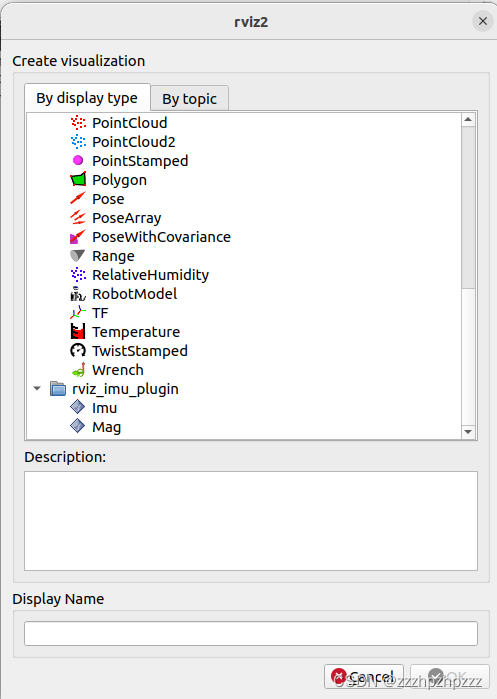
 本文介绍了如何在ROS环境中,通过安装rviz_imu_plugin插件,将原始的IMU四元数数据在rviz中进行可视化,并设置了话题和GlobalFrame,确保坐标系正确反映机器人姿态变化。
ROS2中实现IMU数据可视化
本文介绍了如何在ROS环境中,通过安装rviz_imu_plugin插件,将原始的IMU四元数数据在rviz中进行可视化,并设置了话题和GlobalFrame,确保坐标系正确反映机器人姿态变化。
本文介绍了如何在ROS环境中,通过安装rviz_imu_plugin插件,将原始的IMU四元数数据在rviz中进行可视化,并设置了话题和GlobalFrame,确保坐标系正确反映机器人姿态变化。
ROS2中实现IMU数据可视化
本文介绍了如何在ROS环境中,通过安装rviz_imu_plugin插件,将原始的IMU四元数数据在rviz中进行可视化,并设置了话题和GlobalFrame,确保坐标系正确反映机器人姿态变化。
 2839
1205
1132
881
2410
2839
1205
1132
881
2410

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言






 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























