




有时候我们需要将一个零件分割成不同的部分,以下是分割方法:
首先打开你要分割的零件,随后按以下步骤执行.
1、插入->特征 ->分割

2、选择两个零件有接触的面
3、点击“切除零件”
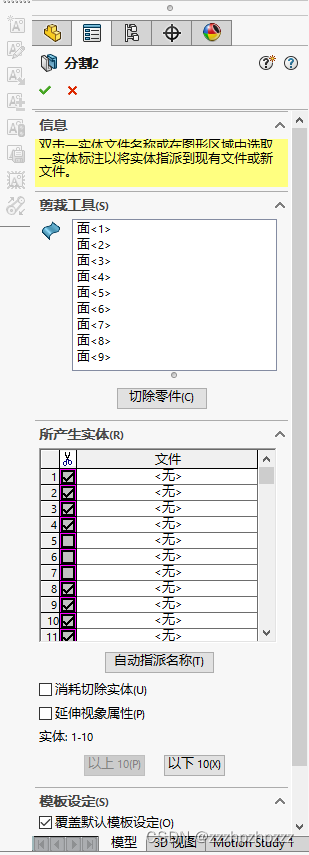
4、选择你需要切割的部分,如果你需要的部分和你不需要的部分有黏连,检查一下第二步你有没有做正确
5、如果你需要去除选择的部分,勾选“消耗切除实体”,否则不勾选
6、点击对钩,完成分割
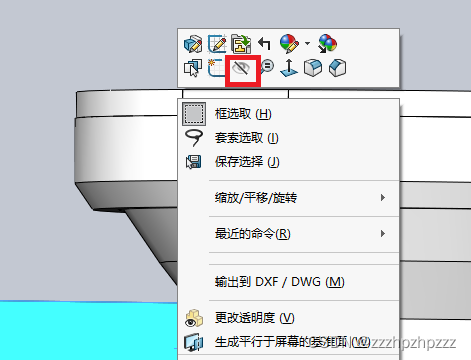
7、如果你需要单独导出切割的部分和留下的部分,你可以编辑切割特征,勾选或不勾选“消耗切除实体”,再配合“隐藏”指令,留下你需要导出的部分,分别导出不同部件.
在零件上单击鼠标右键,如下图红框所示就是“隐藏”指令。
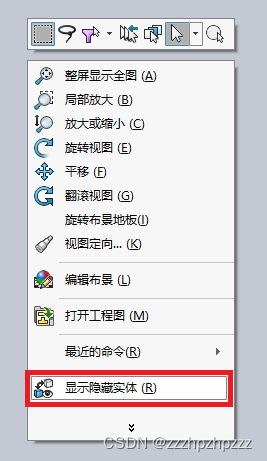
隐藏后恢复隐藏,需要在空白处单击右键,选择“显示隐藏实体”,然后点击你需要显示的实体。
最后退出界面。
SolidWorks分割单个零件
于 2023-04-14 13:24:30 首次发布
 该文详细介绍了如何使用软件进行零件分割,包括选择接触面、切除、消耗切除实体选项的使用,以及如何通过隐藏和显示功能来单独导出切割部分和剩余部分。
该文详细介绍了如何使用软件进行零件分割,包括选择接触面、切除、消耗切除实体选项的使用,以及如何通过隐藏和显示功能来单独导出切割部分和剩余部分。

















 6万+
6万+




 到【灌水乐园】发言
到【灌水乐园】发言







