




 这篇博客介绍了如何在Unity中实现Sobel Edge Detection算法,通过Shader检测图像边缘。内容包括Shader的编写,涉及到纹理采样、像素操作等技术。
这篇博客介绍了如何在Unity中实现Sobel Edge Detection算法,通过Shader检测图像边缘。内容包括Shader的编写,涉及到纹理采样、像素操作等技术。
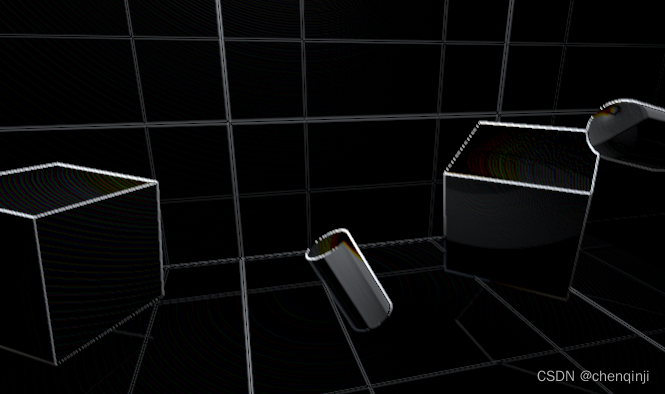
Shader "CX/Edge Detection" /* The edge detection algorithm that is implemented in this shader is named "Sobel Edge Detection" */
{
Properties
{
_Color ("Color", Color) = (1,1,1,1)
}
SubShader
{
Tags { "Queue"="Transparent" }
Cull Back
GrabPass { }
Pass
{
CGPROGRAM
#pragma vertex vert
#pragma fragment frag
#include "UnityCG.cginc"
struct appdata
{
float4 vertex : POSITION;
float3 normal : NORMAL;
};
struct v2f
{
float4 position : POSITION;
float4 screenPos : TEXCOORD0;
};
fixed4 _Color;
sampler2D _GrabTexture : register(s0);
v2f vert(appdata input)
{
v2f output;
output.position = UnityObjectToClipPos(input.vertex);
output.screenPos = output.position;
return output;
}
half4 pixel;
half2 uv;
fixed onePixelW, onePixelH;
half4 frag(v2f input) : SV_Target
{
uv = input.screenPos.xy / input.screenPos.w;
uv.x = (uv.x + 1) * .5;
uv.y = 1.0 - (uv.y + 1) * .5;
onePixelW = 1.0 / _ScreenParams.x;
onePixelH = 1.0 / _ScreenParams.y;
pixel = 0;
pixel = abs(
tex2D(_GrabTexture, half2(uv.x - onePixelW, uv.y)) -
tex2D(_GrabTexture, half2(uv.x + onePixelW, uv.y)) +
tex2D(_GrabTexture, half2(uv.x, uv.y + onePixelH)) -
tex2D(_GrabTexture, half2(uv.x, uv.y - onePixelH))
);
return pixel * _Color;
}
ENDCG
}
}
}

















 4538
4538

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









