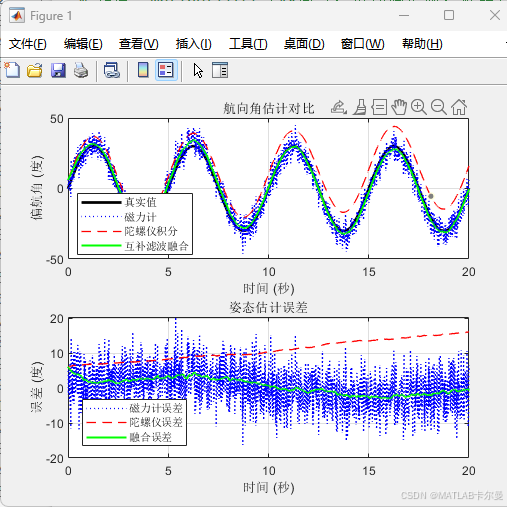
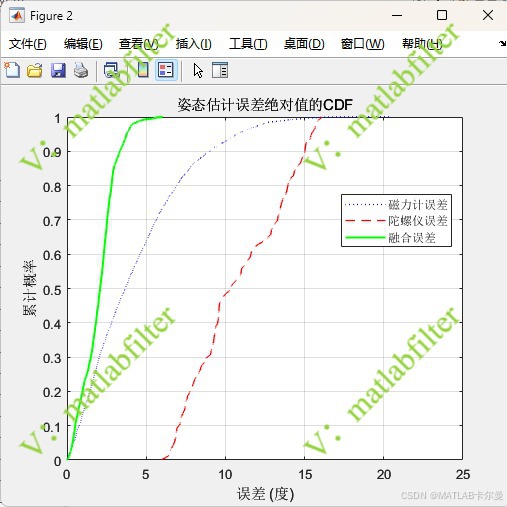
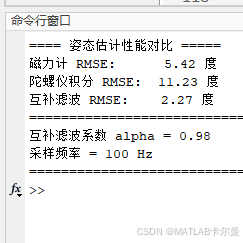
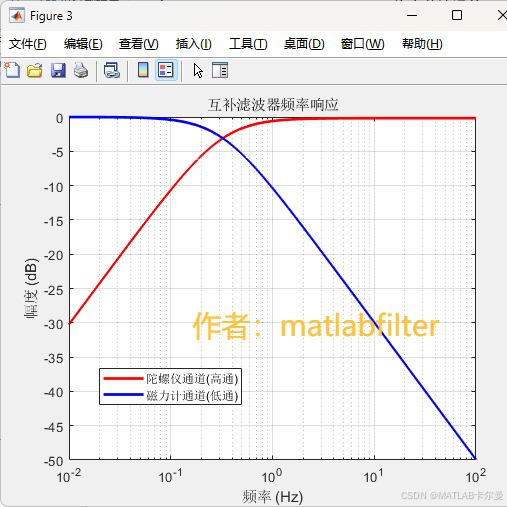
基于MATLAB的传感器数据融合系统,通过互补滤波器算法融合磁力计和陀螺仪数据,实现高精度的航向角估计。该系统模拟了IMU(惯性测量单元)在实际应用中的姿态解算过程。 订阅专栏后,可直接查看源代码,粘贴到MATLAB空脚本中即可直接运行、得到结果 文章目录 运行结果 MATLAB源代码 程序详解 项目简介 核心功能 算法原理 参数设置 输出结果 运行结果 角度估计曲线、误差曲线: 误差绝对值的CDF图像: 命令行截图: 滤波器频率相应截图: MATLAB源代码 完整代码如下: % 磁力计与陀螺仪数据融合-互补滤波器,用于姿态估计(偏航角/航向角计算) % 作者: matlabfilter % 2025-10-30/

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










 订阅专栏 解锁全文
订阅专栏 解锁全文


















 1688
1688







