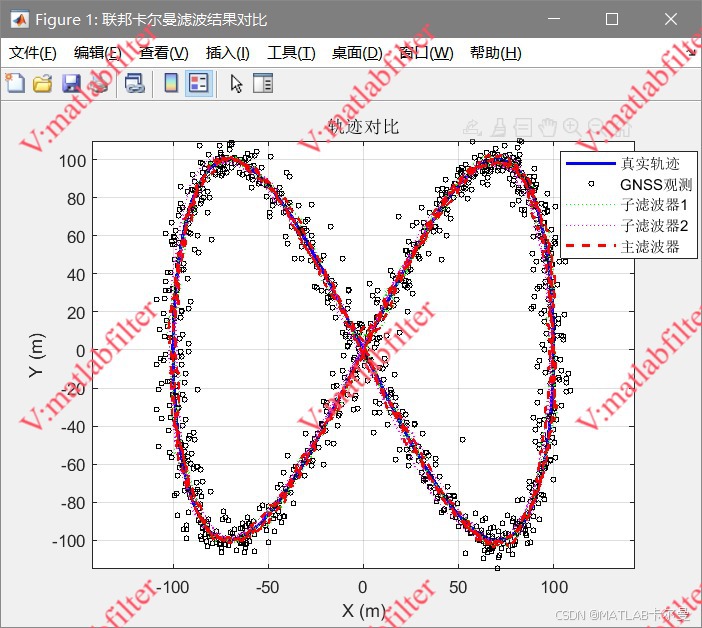
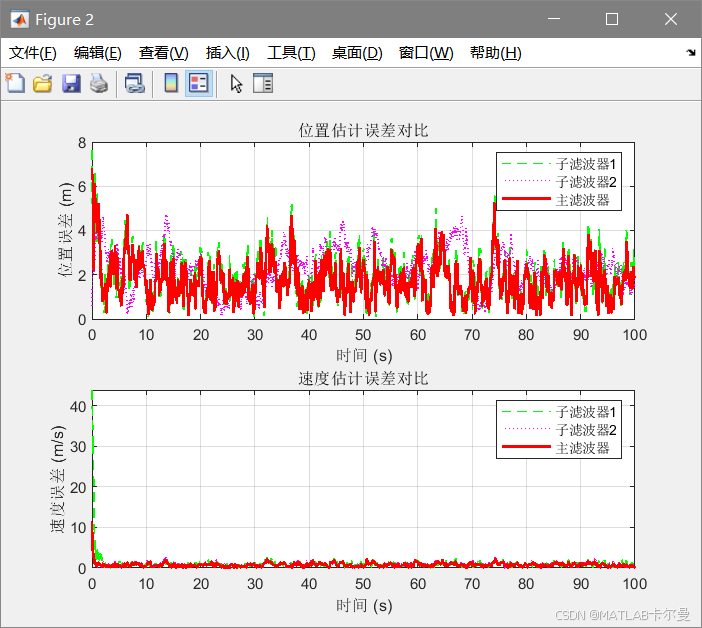
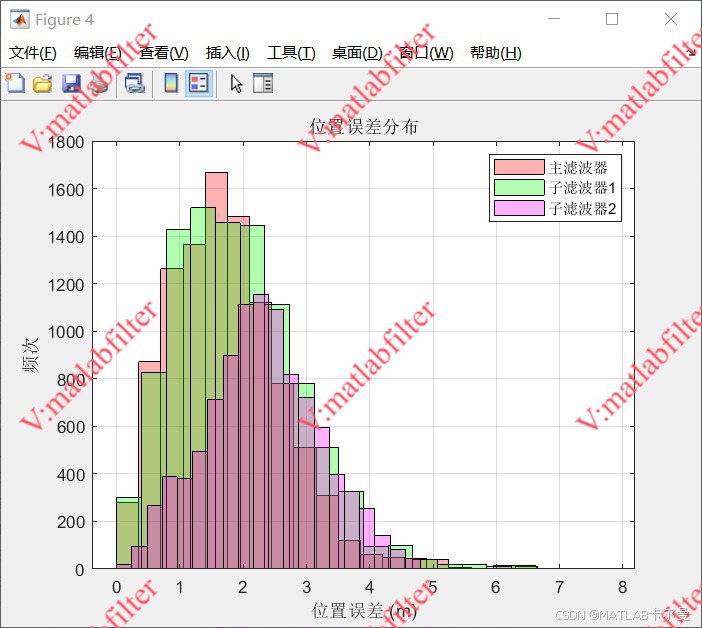
本程序实现标准结构的联邦卡尔曼滤波(FKF),融合IMU+GNSS与IMU+odom两个子滤波器,通过主滤波器统一估计二维位置、速度与加速度。系统考虑公共信息管理、信息加权融合及反馈机制,具备高精度和鲁棒性,适用于多传感器导航仿真。 订阅专栏后,可直接查看源代码,粘贴到MATLAB空脚本中即可直接运行、得到结果 文章目录 运行结果 MATLAB源代码 📘 程序详解 总述 🔧 状态建模 状态向量定义: 离散时间状态转移模型: 📡 观测模型 🔁 子滤波器更新 🔗 联邦融合机制(主滤波器) 信息融合策略: 运行结果 各方法得到的轨迹对比: 各方法得到的误差对比: 位置误差的分布柱状图: 命令行窗口输出的误差特性:









 订阅专栏 解锁全文
订阅专栏 解锁全文



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








