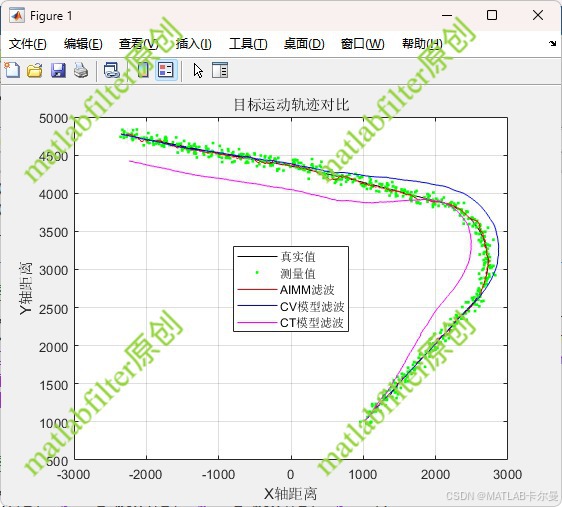
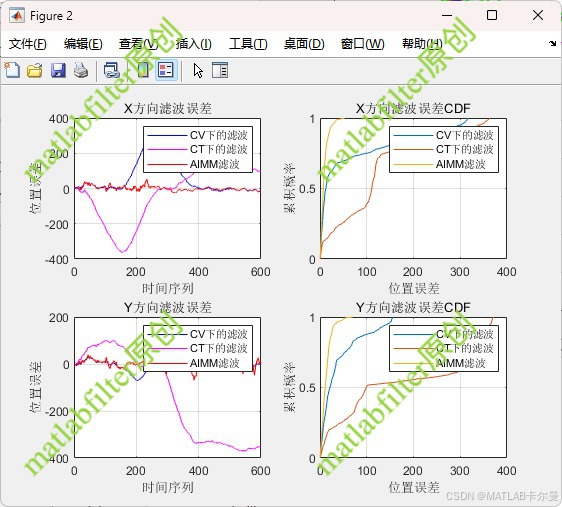
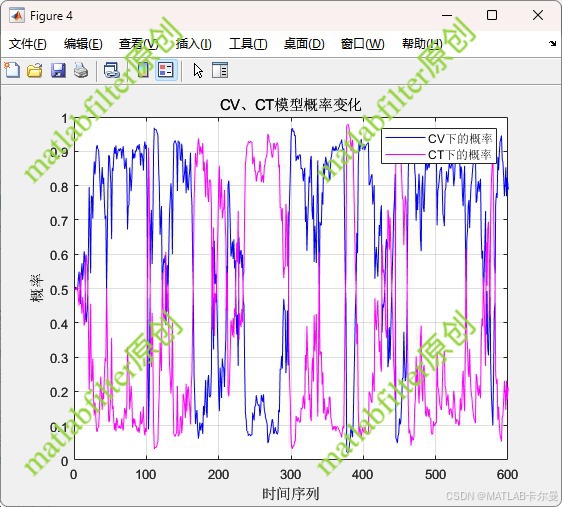
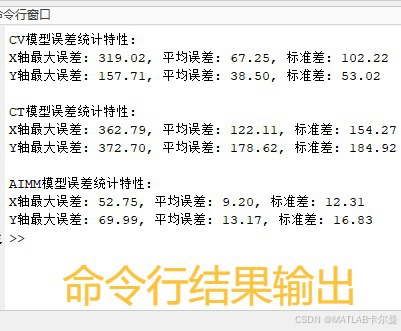
用于二维平面中对目标运动状态的自适应估计。它融合了 交互多模型(IMM)滤波框架、Sage-Husa自适应噪声估计方法 以及 扩展卡尔曼滤波(EKF),使用CV和CT两种运动模型。 订阅专栏后可直接查看完整代码 文章目录 运行结果 MATLAB源代码 程序详解 系统建模 CV/CT模型状态转移公式 IMM 交互多模型融合框架 🔄Sage-Husa 自适应滤波嵌入 滤波与融合结果 📈图像输出模块包括 运行结果 轨迹真值与各方法估计值对比: 误差与误差CDF图像: IMM概率曲线: 命令行输出结果: MATLAB源代码 完整代码如下,粘贴到MATLAB空脚本中即可直接运行: % 自适应IMM算法(CV/CT模型),二维平面 % 包含观测噪声自适应,使用Sage-Husa EKF作为滤波主体,带误差统计特性输出






 订阅专栏 解锁全文
订阅专栏 解锁全文



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








