




代码利用三角定位和动态调整,实时更新导弹的飞行路径,以提高命中率,广泛应用于军事导弹和无人机等领域。`
代码说明
-
参数配置
明确分离制导站坐标、目标运动参数和导弹性能参数,便于修改场景。 -
运动学更新
每个时间步动态计算目标新位置,并根据当前雷达-目标连线方向修正导弹航向,确保严格遵循三点法规则。 -
可视化增强
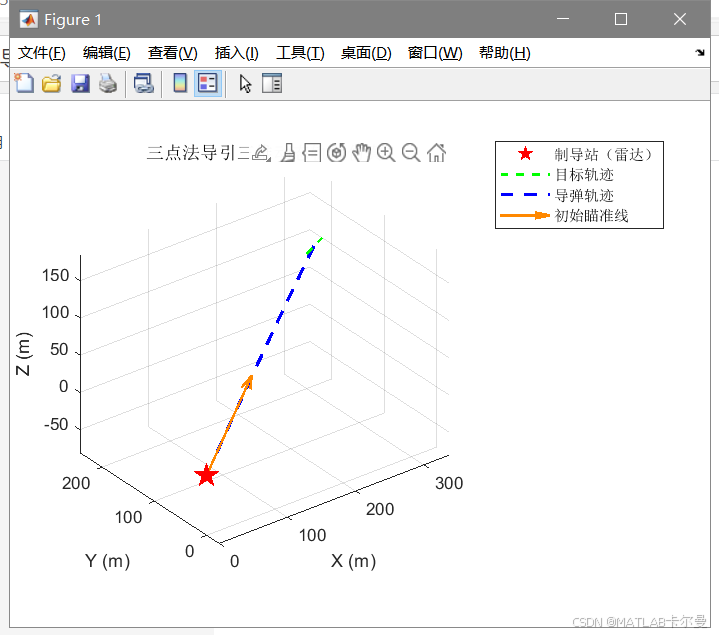
使用三维箭头标注初始瞄准线,区分目标和导弹轨迹线型,直观展示导引过程。
三点法导引数学建模
数学模型推导
设制导站(跟踪雷达)坐标为 S = [ x s , y s , z s ] S = [x_s, y_s, z_s] S=[xs,ys,zs],目标坐标为 T ( t ) T(t) T(t),导弹坐标为 M ( t ) M(t) M(t)。根据三点法导引规则,导弹位置始终满足:
M ( t ) = S + λ ( t ) ⋅ ( T ( t ) − S ) M(t) = S + \lambda(t) \cdot \left( T(t) - S \right) M(t)=S+λ(t)⋅(T(t)−S)
其中 λ ( t ) ∈ [ 0 , 1 \lambda(t) \in [0,1 λ(t)∈[0,1为比例系数,随时间递增趋近于1。
运动学方程
- 目标运动方程(假设匀速直线运动):
T ( t + Δ t ) = T ( t ) + v T ⋅ Δ t T(t+\Delta t) = T(t) + v_T \cdot \Delta t T(t+Δt)=T(t)+vT⋅Δt - 导弹速度方向约束:
导弹速度 v M v_M vM方向始终沿 S − T ( t ) S-T(t) S−T(t)连线方向,故导弹位置更新方程为:
M ( t + Δ t ) = M ( t ) + v M ⋅ Δ t ⋅ T ( t ) − S ∥ T ( t ) − S ∥ M(t+\Delta t) = M(t) + v_M \cdot \Delta t \cdot \frac{T(t) - S}{\|T(t) - S\|} M(t+Δt)=M(t)+vM⋅Δt⋅∥T(t)−S∥T(t)−S
代码运行结果
界面示意图:
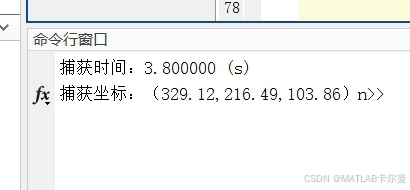
捕获时间与坐标(命令行窗口截图):
代码结构:
MATLAB仿真代码
部分代码如下:
% 三点法导引,三维空间上的
% 2025-05-29/Ver1
clear; clc; close all;
%% 参数定义
% 制导站坐标(跟踪雷达)
S = [0, 0, 0]; % 假设雷达位于原点
% 初始目标位置与速度
T0 = [300, 200, 100]; % 目标初始坐标 (m)
vT = [10, 5, 0]; % 目标运动速度 (m/s)
% 导弹参数
vM = 100; % 导弹速度 (m/s)
M0 = S + 0.1*(T0 - S); % 导弹初始位置(靠近雷达)
% 仿真参数
dt = 0.1; % 时间步长 (s)
totalTime = 20; % 总仿真时间 (s)
steps = totalTime / dt; % 总步数
%% 初始化轨迹存储
% traj_T = zeros(steps, 3); % 目标轨迹
% traj_M = zeros(steps, 3); % 导弹轨迹
traj_T(1,:) = T0;
traj_M(1,:) = M0;
%% 三点法导引动态仿真
完整代码的下载链接:https://download.youkuaiyun.com/download/callmeup/90942866
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











