



NVIDIA创始人黄仁勋预测:未来五年,AI与机器人技术将深度融合。到那时,我们身边可能会出现像《星球大战》中R2-D2那样的身边伙伴:家庭机器人记得你的生活习惯,办公室助手能主动整理文件,出行时甚至有机器人帮你分担重物。不过,挑战依然存在。在复杂真实环境中保持稳定表现、解决高难度动作规划等问题是实现“通用型机器人”的关键瓶颈。
为助力研究者把握领域前沿,我们精选50+篇具身智能核心论文,覆盖感知建模、仿真训练、场景落地等重点方向,为相关研究提供参考,需要的同学可扫码免费领取。
扫码回复【具身智能】
免费领取论文合集

1.Large Model Empowered Embodied AI: A Survey on Decision-Making and Embodied Learning.
【要点】本文综述了大型模型赋能的具身人工智能在自主决策和具身学习方面的应用,重点探讨了大型模型如何提升决策层次和端到端决策的效率,以及如何增强模仿学习和强化学习的效果。 【方法】文章采用文献综述的方法,系统分析了大型模型在具身人工智能领域的应用,包括决策层次的提升和端到端决策的优化,以及模仿学习和强化学习的增强。 【实验】本文未提供具体实验细节,但综述了相关研究,涉及数据集名称未在文中明确提及;总结了大型模型如何通过设计方法和关键角色提升决策和学习效果,并讨论了现有挑战和研究方向。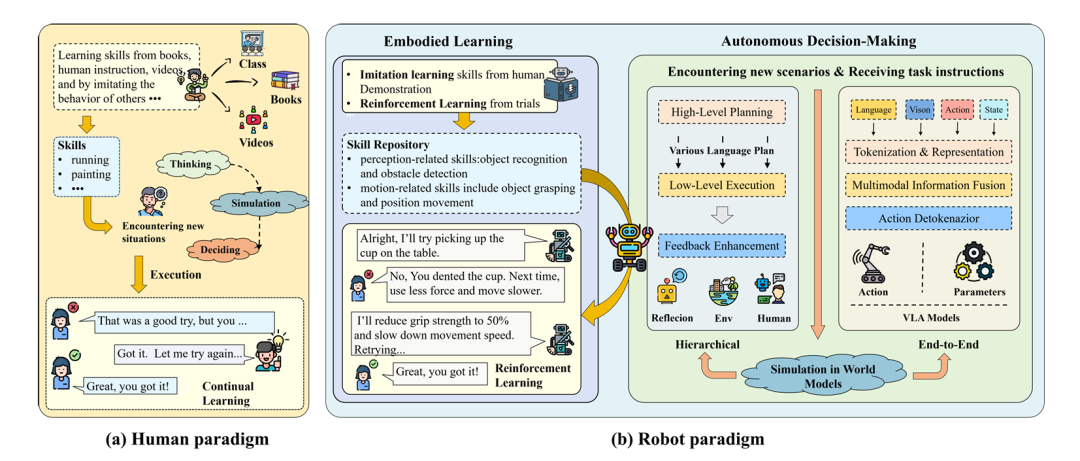
2.Survey of Vision-Language-Action Models for Embodied Manipulation.
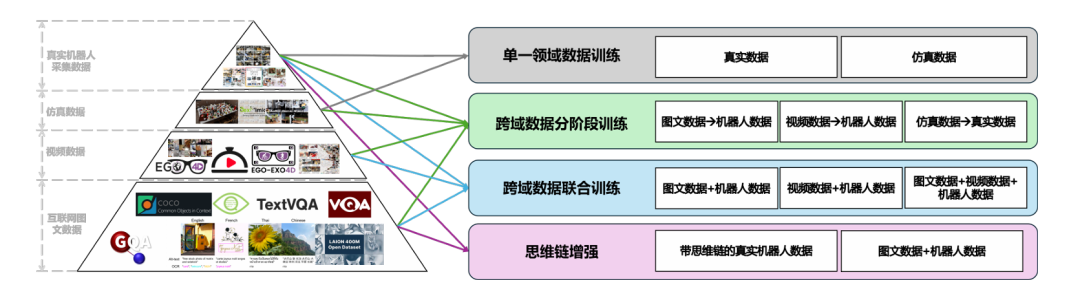
【要点】本文综述了视觉-语言-动作(VLA)模型在增强型智能系统中的发展轨迹、关键技术和挑战,提出未来研究方向,强调其在机器人操控中的广泛应用和潜力。
【方法】文章采用文献综述方法,系统性地分析VLA模型的架构发展、训练数据集、预训练和后训练方法以及模型评估。
【实验】本文未具体描述实验过程,但综述了相关研究中使用的数据集和模型评估结果,涵盖多个维度的分析。
3.Embodied AI Agents: Modeling the World.
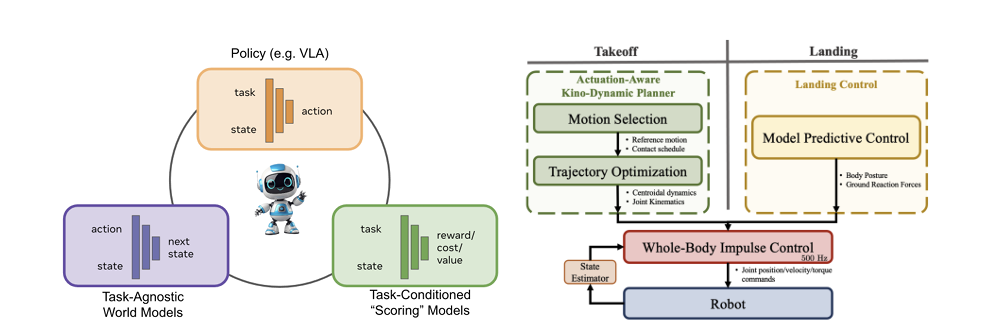
【要点】本文探讨了具有视觉、虚拟或物理形态的AI智能体研究,提出构建世界模型对于提高智能体推理、规划和自主完成任务能力的重要性,并创新性地提出学习用户的心理世界模型以促进人机协作。
【方法】研究通过集成多模态感知、基于推理的行动规划与控制,以及记忆功能,构建了一个全面理解物理世界的智能体世界模型。
【实验】文中未详细描述具体实验及使用的数据集,但提到通过虚拟化身、可穿戴设备和机器人等形态的智能体进行实验,实验结果表明构建世界模型能够增强智能体理解环境、预测行为以及理解用户意图的能力。
4.Generative Multi-Agent Collaboration in Embodied AI: A Systematic Review.
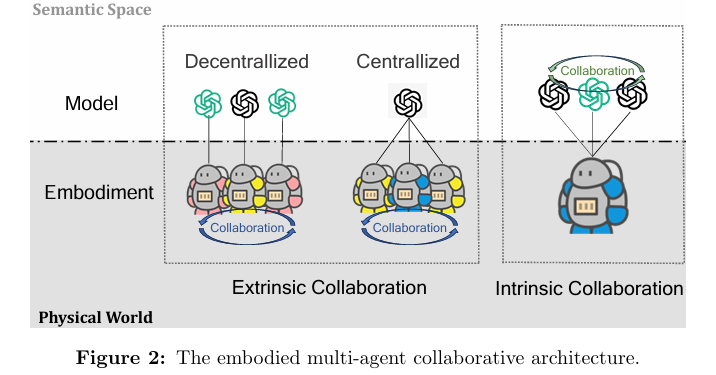
【要点】本文系统性地回顾了具身多智能体系统(EMAS)如何通过集成基础模型实现生成性多智能体合作,增强了系统的鲁棒性和灵活性,并探讨了未来挑战及发展方向。
【方法】作者提出了一种分类法,将EMAS按照系统架构和具身方式分类,并分析了感知、规划、通信和反馈等核心构建模块。
(篇幅限制,只展示部分论文)
扫码回复【具身智能】
免费领取合集


看完这些最新研究方向,就可以开始准备CVPR、ICLR、AAAI等顶会论文了,但是如果你在写论文时还是想不出idea,缺乏数据集,不知道如何选择期刊投稿,那么可以找到追梦AI! 专注学术背景提升,为大学生、硕士、博士提供专业的学术辅导服务。(郑重声明:不代写!
领取福利
科研资料大放送:
1.《申博咨询规划一次》
2.《1000+热门idea合集》
3.《往期大牛热点分析直播课》
3.《全方向顶会顶刊论文合集》
扫码领取
科研福利大礼包⬇️


















 2573
2573

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









