




引言:微型步进电机与 TMC2300 的 “黄金搭档”
在 IoT 设备、手持终端、微型 3D 打印机、医疗仪器等小型化电子系统中,微型步进电机是实现高精度机械运动的核心执行器。这类场景对电机控制的核心需求高度统一:低电压供电(适配电池)、静音运行(贴近用户)、节能降耗(延长续航)、精准控位(保证功能)。然而,传统步进电机驱动方案(如 A4988、DRV8825)往往难以同时满足这些需求 —— 要么噪音大、要么功耗高、要么控制精度不足。
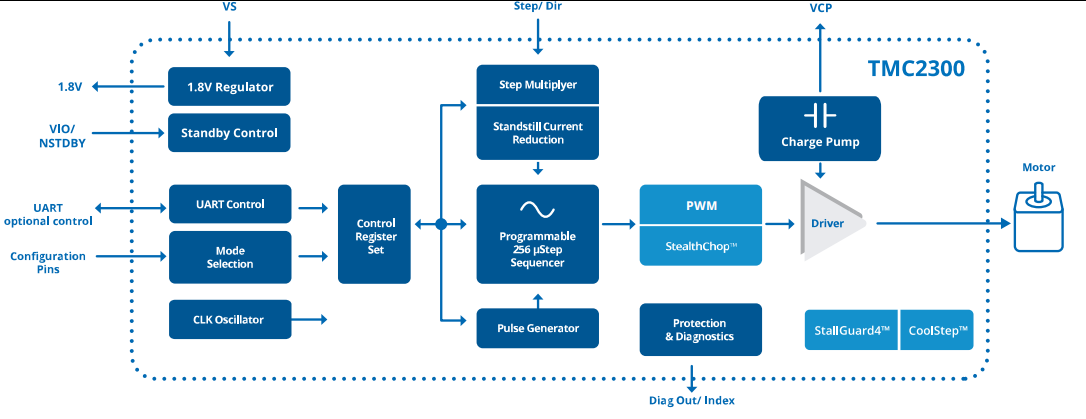
TRINAMIC 推出的TMC2300步进电机驱动芯片,正是为解决这些痛点而生。它不仅支持 2V~11V 低电压(适配 2 节 AA 电池或 1~2 节锂电池)、最大 1.2A RMS 电流输出,还集成了 StealthChop2™静音驱动、CoolStep™负载自适应节能、StallGuard4™无传感器失步检测等核心技术,封装仅 3mm×3mm QFN20,完美适配微型设备的空间需求。
本文将以 TMC2300 为核心,从基础概念到实战配置,全方位解析微型步进电机的速度、力度(电磁转矩)、周期精密控制逻辑,重点梳理细分倍数与步距角的对应关系,并通过大量工程实例验证方案可行性,最终帮助读者掌握从芯片选型到落地调试的完整技术链路。
一、基础知识铺垫:步进电机控制的核心概念
在深入 TMC2300 的控制逻辑前,需先明确步进电机的核心参数与控制维度,避免后续理解偏差。
1.1 步进电机的核心参数
| 参数名称 | 定义与物理意义 | 常用单位 | 典型值(微型步进电机) |
|---|---|---|---|
| 固有步距角 | 电机每接收 1 个脉冲信号旋转的机械角度(由电机绕组结构决定,不可改变) | °(度) | 1.8°、0.9° |
| 每转固有步数 | 电机旋转 1 圈(360°)所需的脉冲数,计算公式:N=θ0360(θ0为固有步距角) | 步 / 转 | 200 步(1.8°)、400 步(0.9°) |
| 电磁转矩 | 电机带动负载的能力(“力度”),与绕组电流成正比:T=Kt×I(Kt为转矩常数) | N·m、kg·cm | 10mN·m~50mN·m |
| 细分倍数 | 通过驱动芯片将 “固有步距角” 拆分的倍数,用于减小振动、提升控制精度 | -(无单位) | 1、2、4、8、16、32、64、256 |
| 细分步距角 | 细分后的最小旋转角度,计算公式:θsub=Sθ0(S为细分倍数) | °(度)、m°(毫度) | 0.00703125°(1.8°/256) |
1.2 控制的三大核心维度:周期、速度、力度
步进电机的运动本质是 “脉冲驱动下的电磁力变化”,所有控制逻辑都围绕周期(时间)、速度(快慢)、力度(转矩) 三个维度展开,三者的关系是理解控制的关键:
- 周期:分为 “脉冲周期”(单个控制脉冲的时间间隔)和 “每转周期”(电机旋转 1 圈的时间),是速度计算的基础;
- 速度:由脉冲频率决定(单位时间内的脉冲数),需结合细分倍数调整,直接影响设备的运动效率;
- 力度:由绕组电流决定,需通过电流环稳定,直接影响电机能否带动负载且不失步。
后续章节将逐一解析 TMC2300 如何通过硬件功能与软件配置,实现这三个维度的精密控制。
二、TMC2300 芯片详解:硬件基础与核心功能
要实现精密控制,需先掌握 TMC2300 的硬件特性 —— 它的引脚功能、核心技术(如 StealthChop2、CoolStep)是后续控制逻辑的基础。
2.1 TMC2300 核心特性总览
TMC2300 的优势集中体现在 “低电压适配、静音、节能、精准” 四大方向,具体参数如下表所示:
| 特性类别 | 具体参数 | 优势与应用价值 |
|---|---|---|
| 供电与电流 | 电压范围:2V(最低 1.8V)~11V DC最大电流:1.2A RMS(2A 峰值)待机电流:<50nA(典型值) | 适配电池供电(2AA/1~2Li-Ion),续航长,适合手持设备 |
| 控制接口 | STEP/DIR 接口(支持 256 细分)单 wire UART(支持 500k Baud)内部脉冲发生器(独立运行) | 兼容传统控制方式,也支持 UART 高级配置,无需外部 MCU 也能驱动电机 |
| 静音技术 | StealthChop2™电压型 PWM 斩波MicroPlyer™ 256 细分插值 | 低速运行无噪音(仅轴承声),适合办公 / 医疗场景 |
| 节能技术 | CoolStep™负载自适应电流调节自动待机电流降低(<33% 运行电流) | 最多节能 90%,减少电机发热,延长电池寿命 |
| 保护与诊断 | 过温保护(120°C 预警、150°C 关机)短路保护(低侧 / 对地)开路检测(电机线圈) | 提升系统可靠性,避免芯片 / 电机损坏 |
| 封装与尺寸 | QFN20 封装,3mm×3mm暴露焊盘(散热) | 适合微型设备,散热效率高(需 PCB 接地平面配合) |
2.2 TMC2300 引脚功能详解(Top View)
TMC2300 的 20 个引脚中,与 “速度、力度、周期” 控制直接相关的引脚占比约 60%,需重点关注。下表整理了核心引脚的功能的功能:
| 引脚号 | 引脚名称 | 类型 | 核心功能描述 | 控制关联维度 |
|---|---|---|---|---|
| 1 | OA2 | 输出 | 电机线圈 A 的输出端 2(与 OA1 组成 A 相全桥) | 力度(电流输出) |
| 2 | VCP | 电源 | 电荷泵电压端(可选接 1nF~100nF 电容到 VS,提升低电压下的 MOS 管驱动能力) | 力度(电流稳定) |
| 3 | DIR | 输入 | 方向控制端:低电平→电机正转,高电平→反转(需与 STEP 同步) | 速度(方向) |
| 4 | STEP | 输入 | 脉冲控制端:每接收 1 个有效边沿(可设上升 / 双边沿),电机旋转 1 个细分步 | 速度、周期(脉冲) |
| 5 | MS1_AD0</ |
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 362
362

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









