









 本文介绍了计算机视觉中ArUco标记的原理和用途,包括ArUco标记的生成和检测,以及在C++和Python中的实现。ArUco是一种用于姿势估计和现实增强的开源库,能够简化相机姿态的计算。文章还展示了如何将ArUco应用于增强现实应用程序,通过检测和单应性变换将新场景叠加到现有图像或视频上。
本文介绍了计算机视觉中ArUco标记的原理和用途,包括ArUco标记的生成和检测,以及在C++和Python中的实现。ArUco是一种用于姿势估计和现实增强的开源库,能够简化相机姿态的计算。文章还展示了如何将ArUco应用于增强现实应用程序,通过检测和单应性变换将新场景叠加到现有图像或视频上。
一、ArUco标记概述
姿势估计在许多计算机视觉应用中非常重要:机器人导航,增强现实等等。该过程基于发现真实环境中的点与其2d图像投影之间的对应关系。这通常是一个困难的步骤,因此通常使用合成或基准标记来简化操作。最受欢迎的方法之一是使用二进制方形基准标记。这些标记的主要优点是单个标记可以提供足够的对应关系(四个角)来获得相机的姿势。而且,内部二进制编码使它们特别健壮,从而允许应用错误检测和纠正技术。
最受欢迎的方法之一是使用二进制方形基准标记。 这些标记的主要优点是单个标记可以提供足够的对应关系(四个角)来获得相机的姿势。 而且,内部二进制编码使它们特别健壮,从而允许应用错误检测和纠正技术。
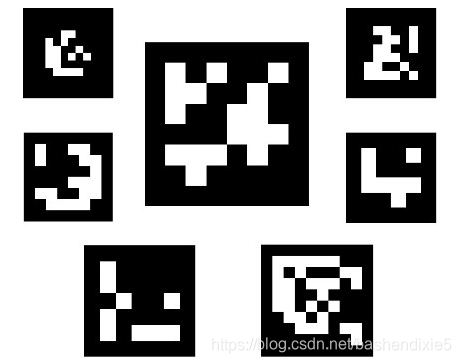
一个ArUco标记外围都有一组黑色边框,同时内部有着确定该标记ID的二维矩阵组合而成。黑色的边框能加速标记在图像中的检测速度,内部的二维编码能唯一识别该标记,同时进行错误检测和错误修复。标记的大小确定了内部矩阵的大小,例如4x4大小的标记有16个bit。
aruco模块基于ArUco库,该库是由RafaelMuñoz和Sergio Garrido开发的用于检测方形基准标记的流行

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 654
654

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











