



在计算机科学教师教育中使用人形机器人NAO的机器人课程评估
摘要
将教育机器人作为计算机科学(CS)实践教学方法在国际计算机科学教育中非常流行。市场上提供了多种适用于计算机科学教育的机器人系统,这些系统通常会针对学生的不同年龄阶段进行设计。本文介绍了一门使用现成的人形机器人NAO的机器人课程的评估结果。该人形机器人是一个58厘米高的机器人,具有25个自由度以及多种传感器(摄像头、麦克风、触摸传感器、声呐等),并支持多种编程语言进行编程。我们对计算机科学教师候选人在两个学期内开展了这门课程,并在为期一周的课程结束时通过一份简短的问卷收集了他们对人形机器人NAO的看法。总体而言,本文介绍了我们大学在计算机科学教育中使用机器人进行教学实践的情况,并为有关计算机科学课堂中机器人系统的讨论提供了参考。
关键词
计算机科学教育,教育机器人,人形机器人,教师教育
ACM参考格式:
尼古拉·珀纳,马丁·亨内克。2018年。在计算机科学教师教育中使用人形机器人NAO的机器人课程评估。载于第13届中小学计算机教育研讨会论文集(WiPSCE ‘18),2018年10月4日至6日,德国波茨坦。ACM,美国纽约州纽约市,2页。https://doi.org/10.1145/3265757.3265786
1 引言与文献综述
2006年,阿尔德巴兰机器人公司首次向公众推出其人形机器人NAO,旨在将其作为软件开发平台提供给研究机构。他们希望程序员能够专注于高级机器人技术的开发,而无需担心底层机器人技术问题。然而,自从该公司推出了直观的图形化编程环境“Choregraphe”以来,其市场也扩展到了教育领域,因为现在即使没有编程基础也可以使用该机器人。[2]
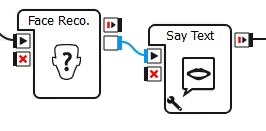
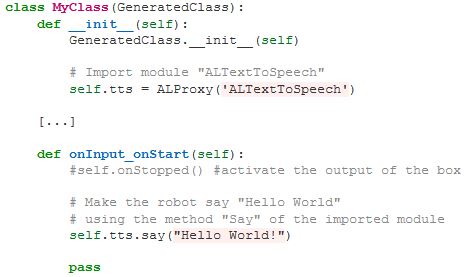
图1展示了一个使用Choregraphe开发的小型代码片段。该编程环境使用模块,这些模块可以通过其输入和输出相互连接。在示例中,中间的蓝色线段表示数据类型“字符串”,它从“人脸识别”的输出传递到“说话文本”的输入。此外,还可以在Python中创建自定义模块。
关于机器人系统在计算机科学教育中的相关研究得出结论:存在大量不同的机器人系统(最初由[1]进行分类)。尽管构建套件具有优势,但即用型套件提供了实际好处,例如教师可以减少课堂准备时间,机器人系统能更专注于编程学习等。对于更高阶的学生,该机器人还可以使用其他(文本型)编程语言进行(完全)编程,例如Python、C++、Java或JavaScript[2]。
2 课程设计
我们在“MINT-Lehramt PLUS”这一附加学习项目的背景下开展了本课程,该项目面向感兴趣的学生以及我们大学科学教育专业中能力较强的学生。该课程被设计为为期一周的集中课程。每天专注于一个特定主题。在进行了广泛的介绍和初步入门后,我们重点学习了运动、语音识别、物体与人脸识别以及人机交互。
3 研究问题与方法论
在为期一周的课程结束时,我们通过一份简短的问卷收集了参与的计算机科学教师候选人对本课程的意见。我们的目的是收集学生对这种机器人系统与其他系统相比的整体看法。所有参与者之前都有使用乐高Mindstorms套件的经验,其中一些人甚至使用过其他机器人或微控制器套装,例如Raspberry Pi或Arduino。
在我们的课程中,最后两个学期共有七名计算机科学教师候选人参与。因此,我们的结果并不具备任何代表性,但这从来不是本研究的目的。我们只是希望收集关于这项新技术在计算机科学教育中应用的一些初步想法。
4 结果
4.1 问题1:您能描述一下您对NAO的第一印象吗?
学生给出了以下回答(以及其他一些):
- “我喜欢NAO,因为他不那么技术化。”
- “我立刻就知道我想教他些什么了。”
- “我喜欢可以不用先搭建机器人就能开始编程。”
- “他是一个可爱的小机器人,让人忍不住想玩。”
- “由于NAO的类人外观,它使用起来更加直观。”
这款机器人的两个主要优势在于它即开即用,以及其类人外观,能立即激发学生对想要实现的机器人任务和项目的构思。
4.2 问题2:在使用NAO的过程中,你最喜欢哪些主题?
学生们给出了以下答案(包括但不限于):
- “我喜欢本课程中的语音识别部分。”
- “人机交互是最有趣的部分。”
- “我最喜欢人脸识别。”
- “我喜欢将各个方面结合到实际项目中,例如老年人护理。”
一方面,特别是实际项目对参与者具有激励作用,这些项目包含了人脸识别和语音识别等不同主题。另一方面,一些参与者表现出对某些主题(例如人脸识别)进行更深入了解的兴趣。当询问参与者关于机器人在计算机科学教育中可能的整合时,也可以观察到这两种观点。
4.3 问题3:你会在计算机科学教育中的哪些地方整合 NAO?
学生给出了以下答案(包括但不限于):
- “我会将他融入高中教育中。”
- “基本上可以根据主题及其复杂性,将他融入所有年龄段中。”
- “我认为可以在跨学科情境中让NAO与年轻学生一起使用。”
- “我会在跨学科情境中使用他,例如作为外语的词汇训练工具。”
尽管如此,所有参与者都认为,由于该机器人的高价格和受伤风险,它更适合作为课外活动的机器人系统,而不是常规计算机科学课程。
4.4 问题4:图形化编程环境“Choregraphe”有哪些优点和缺点?
学生给出了以下答案(包括但不限于):“Choregraphe”图形化编程环境的好处是⋯⋯
- “… 可观察的程序流程。”
- “… 可选择向模块添加新的输入和输出。”
- “… 这是一个直观的拖放环境。”
- “… 可以使用 Python 创建自定义模块(混合编程环境)。”
- “… 集成机器人模拟器。”
- “… 时间线模块,可轻松实现复杂的运动。”
缺点是⋯⋯
- “⋯⋯那些大多无用的错误信息。”
- “⋯⋯不同的框没有用颜色标记(像 Scratch 那样)。”
- “⋯⋯程序包含几个框时变得不清晰。”
- “⋯⋯框上没有用于提供更多信息的工具提示。”
- “… 一些框的不清晰的名称,例如“移动到”和“向⋯移动”。”
5 展望与进一步工作
到目前为止,我们仅使用Choregraphe(以及在自定义模块中少量使用Python)来为机器人编程。主要原因是现有其他编程语言的编程接口较为复杂。因此,我们正在开发一种更直观、更简便的Java编程接口。
由于我们的一些参与者对人脸识别等具体主题特别感兴趣,我们将开发一个涉及机器人视觉感知的程序。在该程序中,我们希望结合机器人和开源库OpenCV来讨论人脸识别和物体识别算法。
由于我们使用该机器人仅限于为高中生开设的少量课程,因此我们希望在计算机科学专业学生的实验室中提供更多的课程来扩展这一经验。

















 39
39

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









