



文 | AUTO芯球
作者 | 雷慢
这下狼真来了,
而且是悄悄的,没有一丝声响,
就昨天,特斯拉向国内部分用户推送了FSD,

第一批针对的是搭载HW4.0的车,
也就2024年2月之后的Model Y/3,以及新款ModelS/X
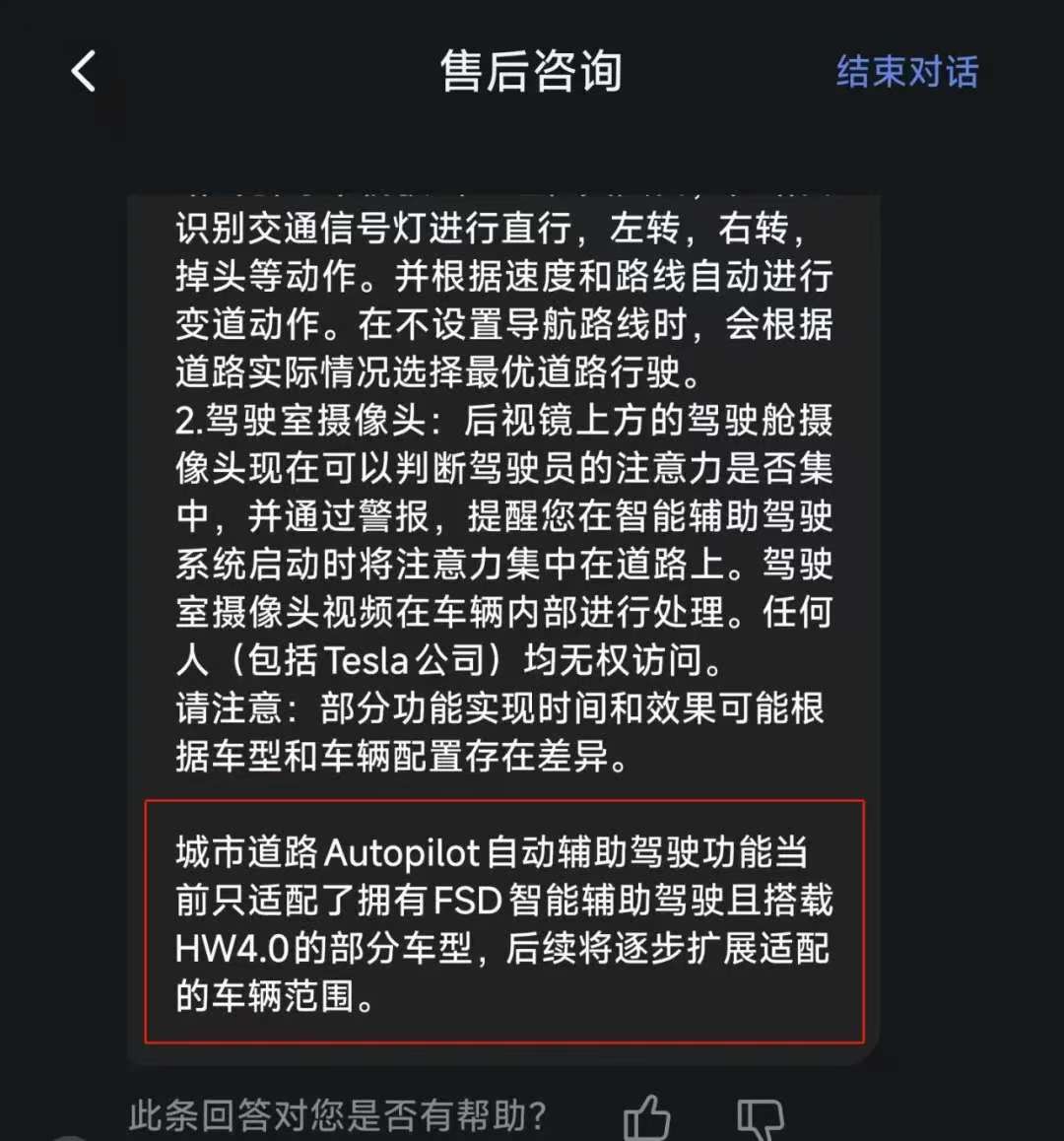
升级后有城市道路自动辅助驾驶NOA功能,
就是国内华为、小鹏常说的高阶智驾,
这一功能让车可以自动出入匝道,掉头、红绿灯自动停车、起步。
但是啊,狼虽然来了,估计也抢不到肉了,
就刚刚,第一批升级FSD的车主路测视频已经出来了,
直行道左转,左转道直行,十字路口试图逆行进入对向车道,
这样子也不像水土不服啊,更像一个弱智,

要知道,这些能城区用智驾的车主,可是花6.4万买的,
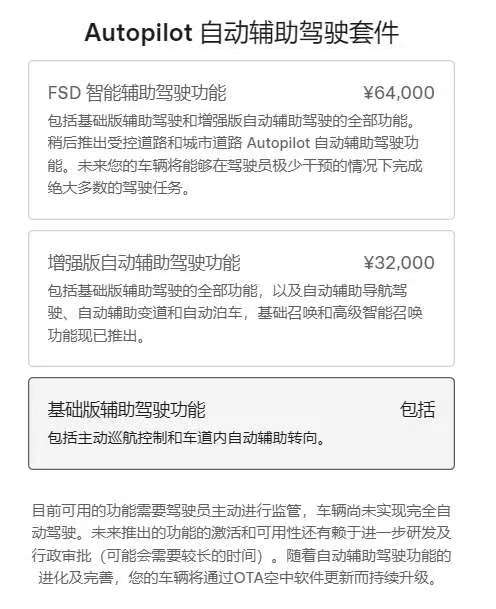
你再看国内,定价最高的是华为ADS3.0,
也才3万块,但是这一价格很少实施,
大多数车主买车给送权益,
实际掏钱也就1万块就能永久买断,
我开问界M9那么多回,城区智驾已经非常精准,
像特斯拉FSD这种表现,
基本是国内华为、小鹏2022年左右的水平,
其他车企比如比亚迪、小鹏、理想,都是直接标配,无需花钱买,
比亚迪用“智驾平权”打价格战,
7万块的车配高阶智驾,直接卷死同行,

再看特斯拉,一款卖23.55万的低配Model3,
再陶6.4万买FSD,价格就来到30万了 ,
你真要有这个钱,已经可以买小米SU7的顶配了,
还有在Model3上你想都别想的魔毯悬架、空气悬架、2.9秒零百加速,
以及800公里的纯电续航。
各位,特斯拉FSD入华,像极了当年苹果iPhone进中国,
骂它贵,骂它智障,但没人敢忽视它。
特斯拉数据本土化以后,力量也不可忽视,
我说过,买智驾是买预期 ,
特斯拉FSD能进国内,以特斯拉的AI能力,
它的智驾本土化的前景不会差,
但是今天国产车也不是五年前了,
智驾、硬件都是靠性价比碾压特斯拉,
我给大家一句话:硬件决定下限,软件决定上限,
FSD或许会很聪明,但最根本的安全问题,
我还是相信有激光雷达的方案,
它们至少不会犯低级错误,
就跟车评人陈震去美国试驾特斯拉的Cybertruck,
用自动泊车时这车居然直接撞了护栏,
这就是硬件不足导致的下限太低了。
而带激光雷达的下限更高,就这么个意思。
好了,买车比价钱,你买我推荐。
*本文图片均来源于网络
聚焦智能汽车,助力关键决策。

















 145
145

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









