




 本文详细阐述了一种算法,用于精确解读机械旋转编码器在开关弹跳问题下的输出,通过软件逻辑消除干扰并计算精确位移。介绍了编码器工作原理、处理机制以及Python和Arduino代码实现。
本文详细阐述了一种算法,用于精确解读机械旋转编码器在开关弹跳问题下的输出,通过软件逻辑消除干扰并计算精确位移。介绍了编码器工作原理、处理机制以及Python和Arduino代码实现。
操作原理
旋转编码器是通常将轴的角运动转换为数字输出信号的设备。有许多 Web 资源解释了这些设备的机制以及如何将它们连接到微型计算机,但本页并非完整的概述。这个想法是提出另一种算法来正确读取机械旋转编码器的输出。
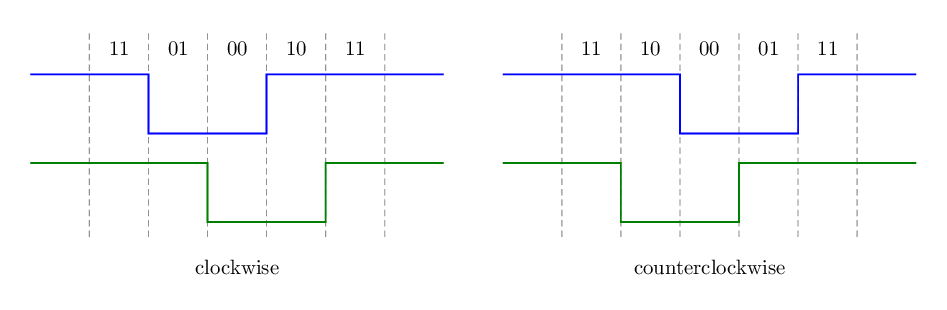
原则上,常见的旋转编码器通过交替闭合两个开关来产生信号,如上图所示。根据连接,中性状态可以是高 (1) 或低 (0)。我们在这里假设中性状态为高的最常见连接。对于顺时针运动,第一个开关的动作先于第二个开关的动作,而逆时针运动则相反。如果我们将每个状态表示为二进制数,两位数字表示两个开关的状态,则中性状态表示为11, 顺时针旋转由状态链表示11→01→00→10→11逆时针旋转由状态链表示11→10→00→01→11.
开关弹跳
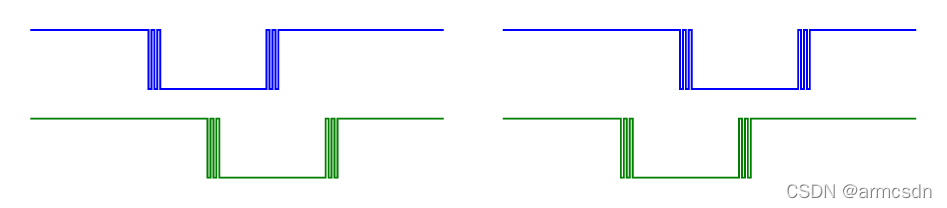
问题是机械电气开关不完善,所以会出现开关弹跳的现象。当切换开关时,触点必须从一个位置物理移动到另一个位置。当开关的组件进入新位置时,它们会机械弹跳,导致底层电路多次打开和关闭。得到的信号如上图所示。
这个问题可以通过硬件或软件来解决。在软件的情况下,这涉及到某个主观确定的保持时间,在此期间开关的活动被忽略。然而,在旋转开关的情况下,我们可以完全避免保持时间。由于这对开关经过四个连续的状态,我们原则上可以准确地定义操作何时完成。
算法
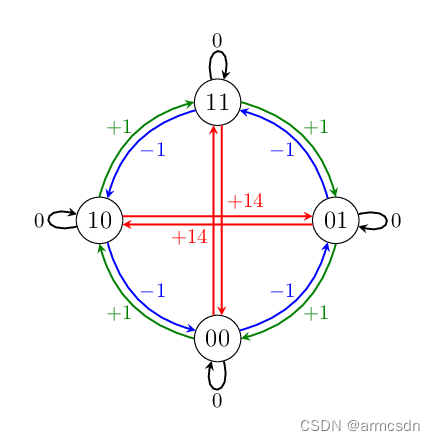
微处理器一共可以读出四种不同的状态,连续两次读出总共给出了十六种可能的转换,如上图所示。四个过渡代表没有移动,四个过渡代表向右四分之一移动,四个过渡代表向左四分之一移动,四个过渡代表理论上不可能的过渡。
让我们将一个完整的周期定义为一个以中性状态开始和结束的过程。通过分配 0 表示没有移动,+1 表示向右移动四分之一,-1 表示向左移动四分之一,我们得到 +4 的总和表示向右一个完整的周期,-4 的总和表示一个完整的循环循环向左,总和为 0 表示没有移动。特别是,每个单独的开关弹跳,无论是向左还是向右,总和为 0,对结果没有影响。此外,聚合和 4 的模数为我们提供了确切的状态。例如,如果模数为零,则当前状态为中性状态。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 6119
6119

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











