



仿生虾桨式机构及其实现
摘要
本文介绍了一种新型水下机器人机构,用于探索海底及其他海洋养殖应用。目前,各种受真实鱼类启发的仿生鱼技术已较为先进,而本文则另辟蹊径,提出一种受虾游泳方式启发的仿生虾机构。聚焦于虾划水肢体的游泳方式,提出一种桨式推进方法,该方法利用虾游泳时腹部的运动。最后,通过开发的原型对推进运动进行了实验,结果得到了表达,并分析了推进力的提升情况。
索引术语
腹足,仿生虾,水下机器人,相位差
一、引言
由于日本是一个四面环海的海洋国家,其海洋资源远比陆地资源丰富。因此,海底勘探正受到科学家和工程师越来越多的关注,以进一步观测水下资源。目前,多种仿生机器鱼正在被开发,旨在为水下机器人[1]的阶段性评估做出贡献。当今用于水下探测的主要推进装置是螺旋桨,其具有多种变体形式,例如不同形状的设计以及可改变叶片方向的类型,已被广泛应用于各种场景。
另一方面,螺旋桨存在一些局限性,例如通过减轻叶片负载可能会加剧空化现象,最大效率的工作范围较小,且当海洋生物接触桨叶时可能对其造成伤害。因此,开发了仿生虾桨式机构,旨在降低风险,该推进装置模仿虾的游泳行为,可在浅水区域无问题地使用。由于虾通过肢体划水前进,这种游泳方式无需高速旋转,不会产生空化现象。
II. 问题描述与提出的解决方案
桨式推进方法以外环船和挖泥船为代表,通过利用虾类划水的相位差来提高推进力,且不高速旋转,因此不会产生空化现象,航行时的推进效率也不会下降。然而,桨式推进装置存在效率低于螺旋桨的问题。因此,采用类似切割器竞赛中特定操作模式的方法,以从桨式推进装置中获得高驱动力。
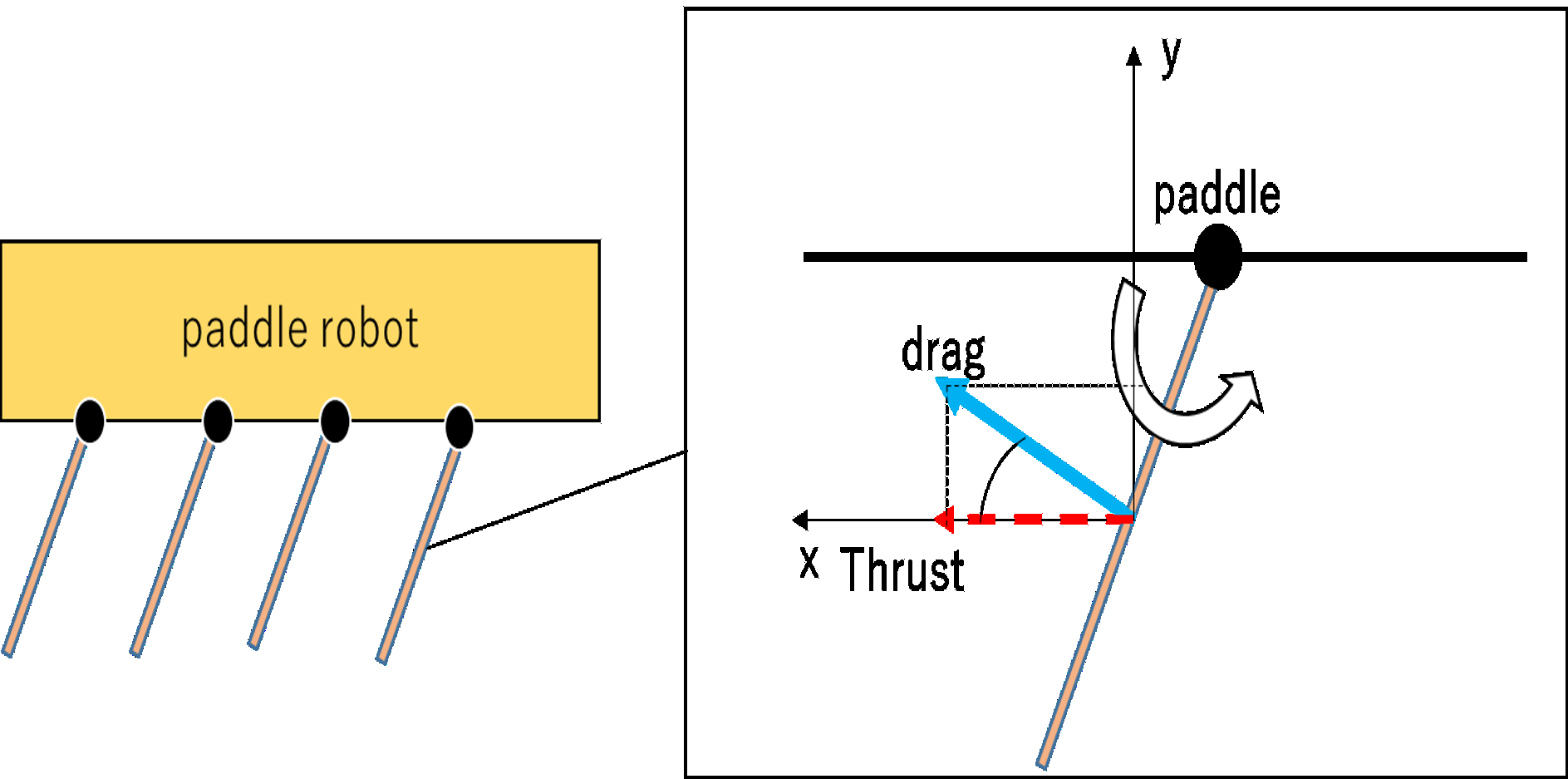
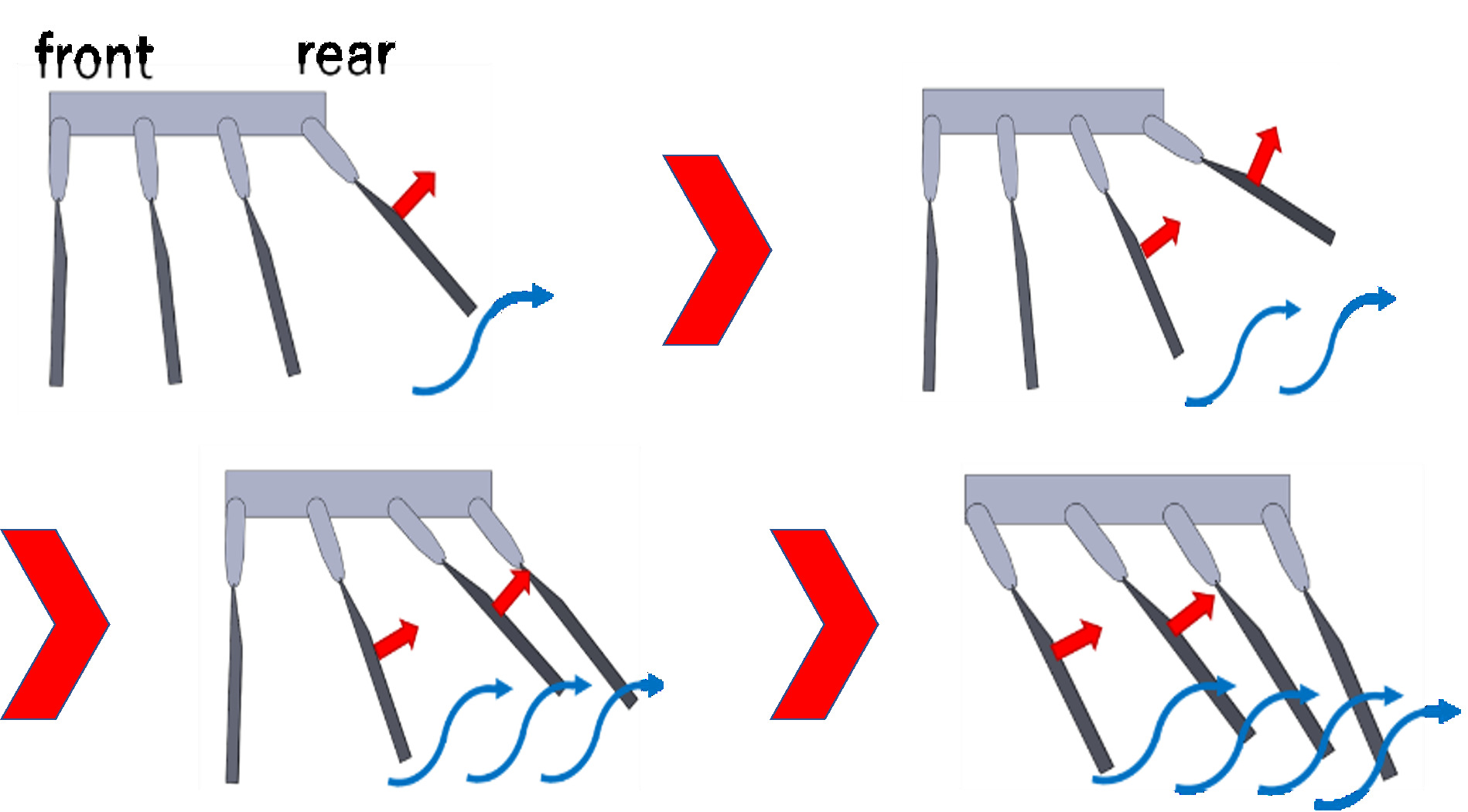
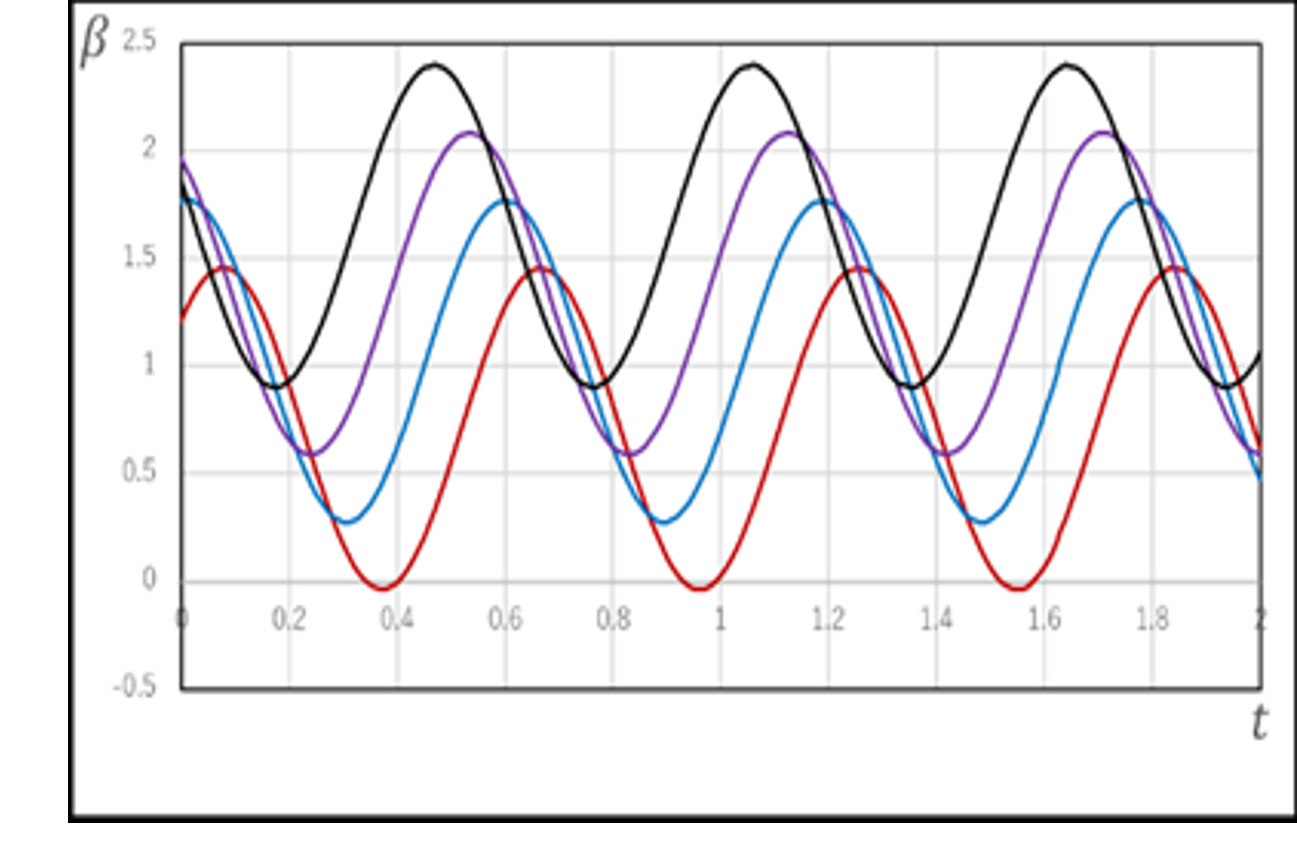
与利用升力的螺旋桨不同,划桨式依靠阻力运动。阻力通常是作用在物体表面并阻碍其运动的力。与升力类似,阻力与划水速度的平方成正比,并在与划水方向相反的方向上产生。划桨式利用该力作为驱动力推动物体前进。我们在图1的坐标系中将划桨中心设为原点。虾从后侧开始依次运动游泳腿,角度变化存在相位差,如图2所示。为了对上述运动进行建模,游泳腿模型基于参考生物学研究论文[3]建立。由此生成机械运动,并设计出原型。利用该原型,我们将在二维平面上进行一系列运动实验,例如前进和转向,以验证其有效性。游泳腿角度与时间的关系图如图3所示。
III. 控制设计与实验结果
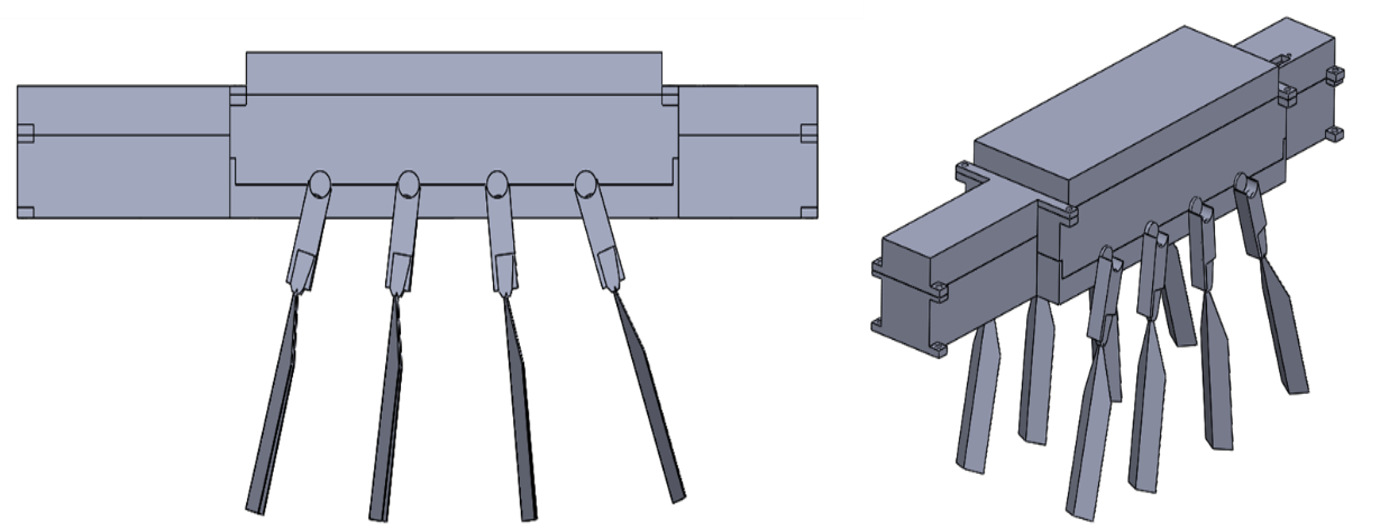
由于目标是在二维平面上收集实验数据,因此设计的原型(图4)被认为在水中工作,从而应用了聚苯乙烯泡沫。控制由计算机执行,微控制器控制总共八个伺服电机。准备了一条显示原型轨迹的路径,以验证二维运动的有效性。当时测得的阻力定义为原型的推进力。
描述了原型机动性的验证实验。将带有浮子的主体从乙烯基泳池的水面出发,通过计算机控制进行二维运动,并在乙烯基泳池两端架设三脚架,从正上方拍摄其运动情况,并在中心悬挂一个带小型相机的方框。描述了原型机动性速度提升的验证测试结果。图5中的图表显示了各条操作轨迹的结果。该图是以部件为原点的xy坐标图。
从图中可以看出,所提出的推进装置能够按照轨迹路径移动,并按预期控制运行。
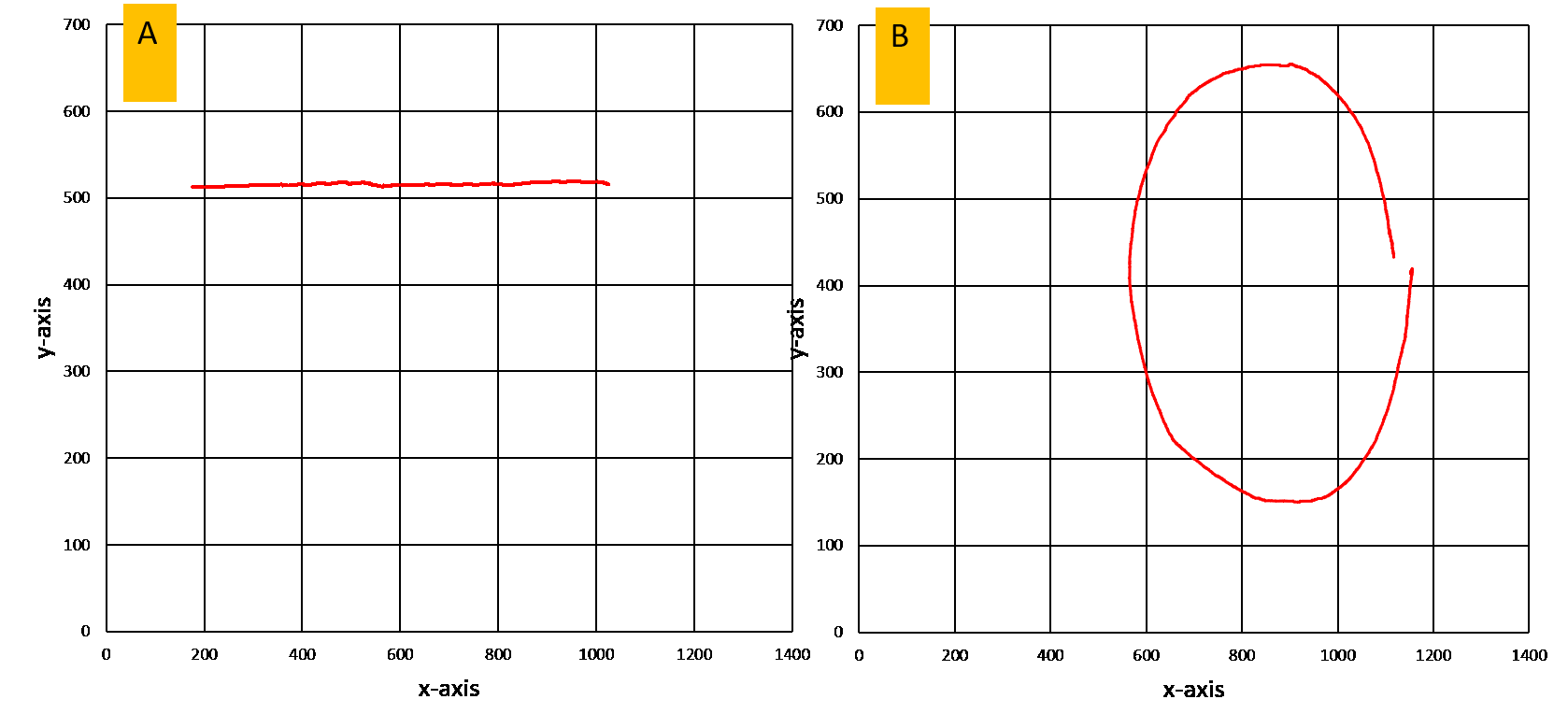 直行轨迹 (B) 转弯轨迹)
直行轨迹 (B) 转弯轨迹)
IV. 结论
本文介绍了一种可控制运动的划桨式推进装置,重点研究了虾类划水的相位差对推进力提升的影响。为了验证所提出的划桨式推进装置的机动性,我们利用开发的原型进行了操作实验,包括二维运动轨迹分析和推进力测量,并评估了该推进方法的有效性。实验还验证了虾的游泳运动中的相位差在提高推进力方面的有效性。仿虾机器人可在图像处理应用领域发挥作用,如水生动物的图像识别、目标检测以及海底水下状况的观测。未来,我们计划将三维要素引入研究内容,并将其发展为可在水下作业的推进装置。


















 770
770

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









