






一.标定原理
基于标定球的线激光和结构光标定原理类似,都是通过算法拟合标定球的球心,通过
AX = XB公式求取手眼标定矩阵,在此对原理做简单说明:
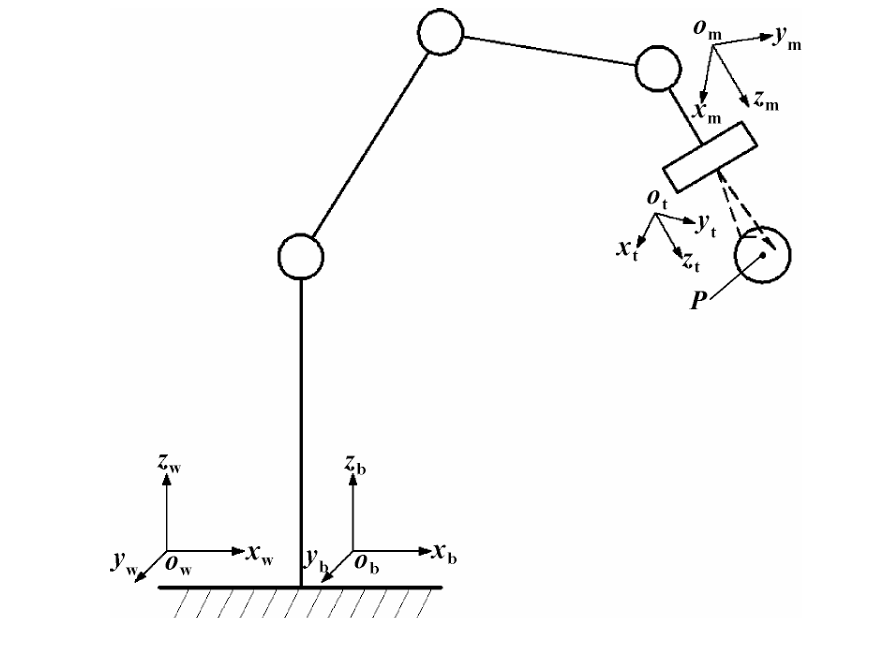 手眼结构简图
手眼结构简图
通过手眼标定原理我们可知有如下公式:
![]()
式子中的下标依据图示为准
通过AX = XB的求解方法,我们可以获取手眼标定的矩阵(,
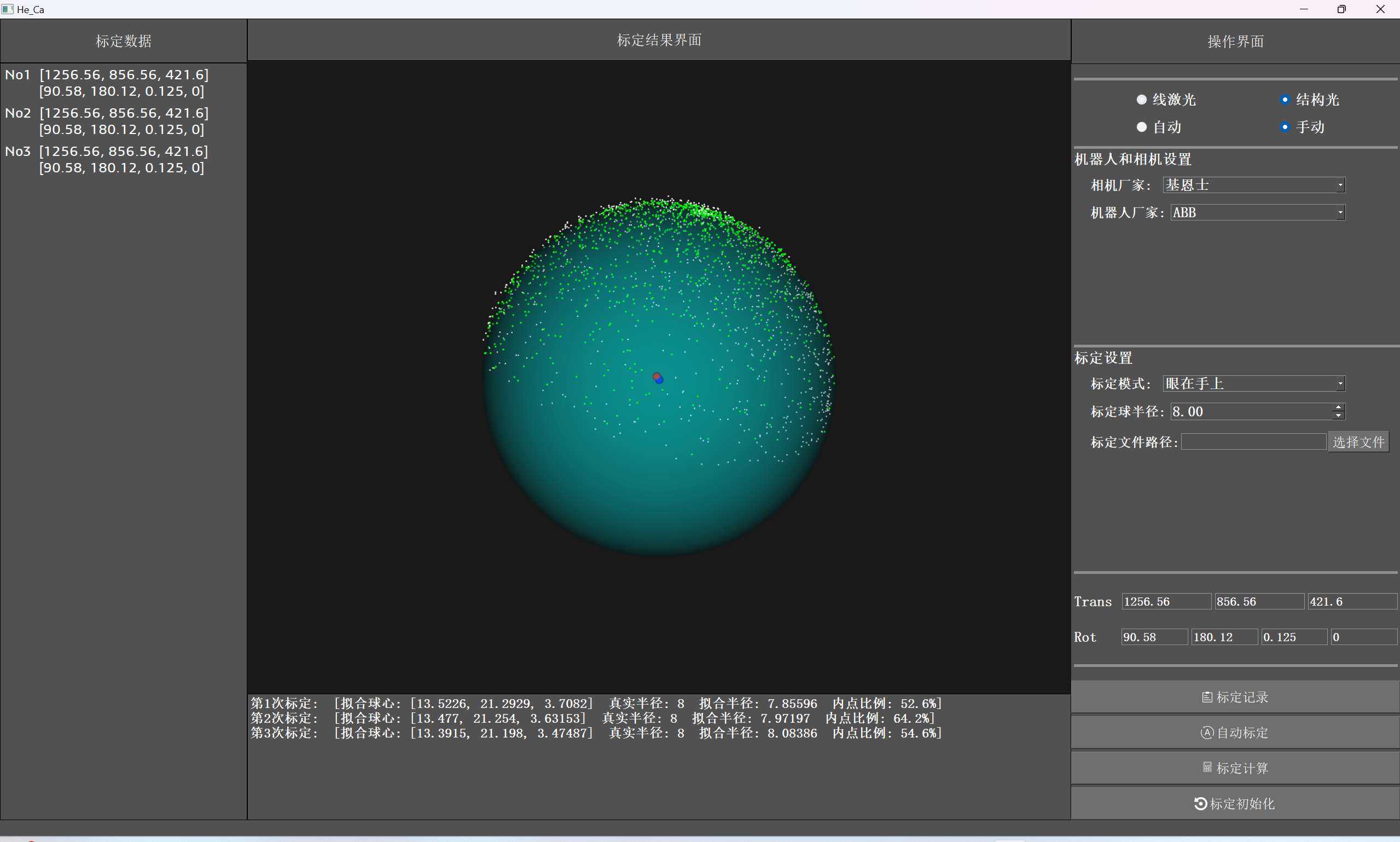
),我们利用Ransac算法和最小二乘法可以获得线激光拟合的球心和半径或结构光拟合的球心及半径,如下图所示:
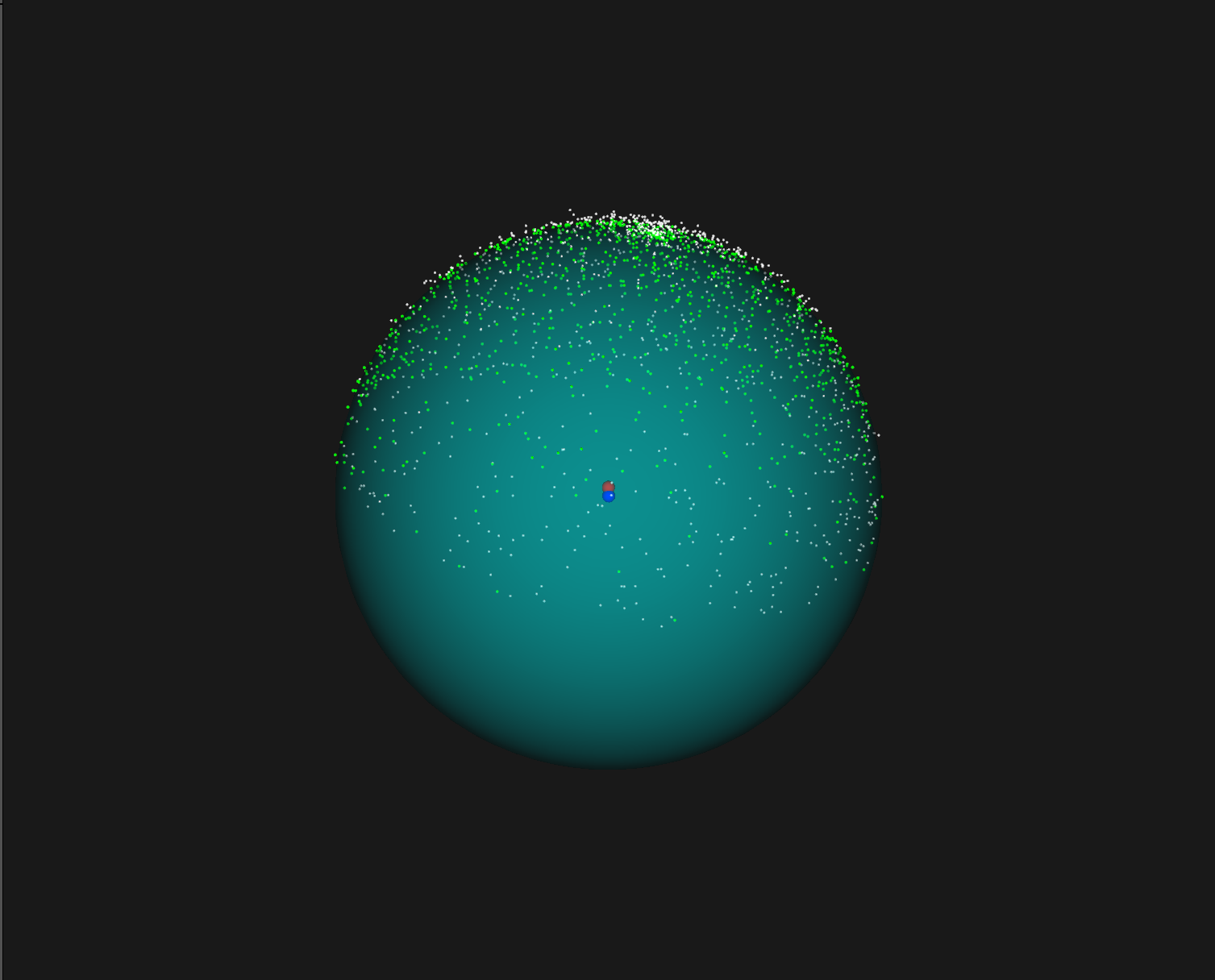 结构光拟合
结构光拟合
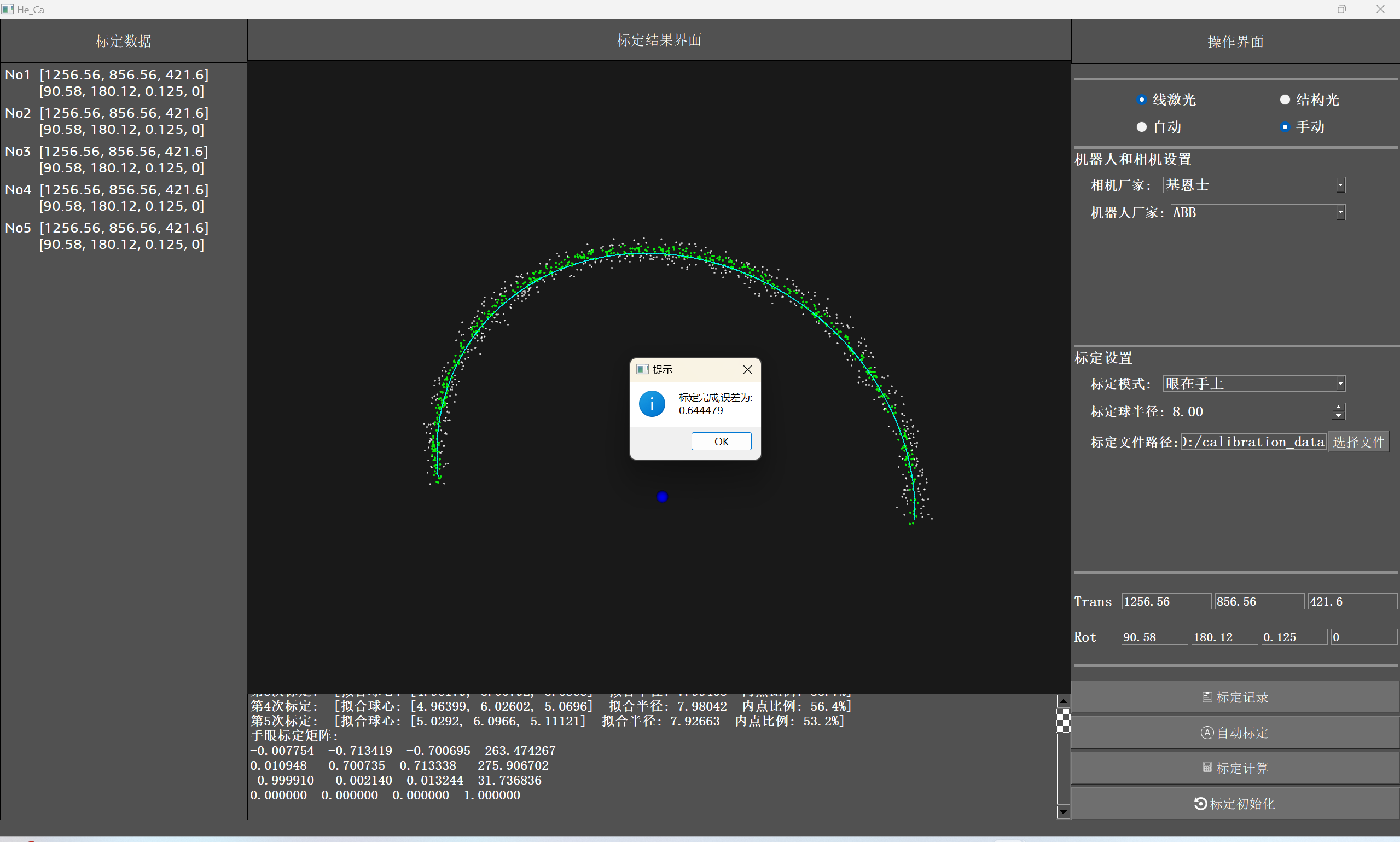
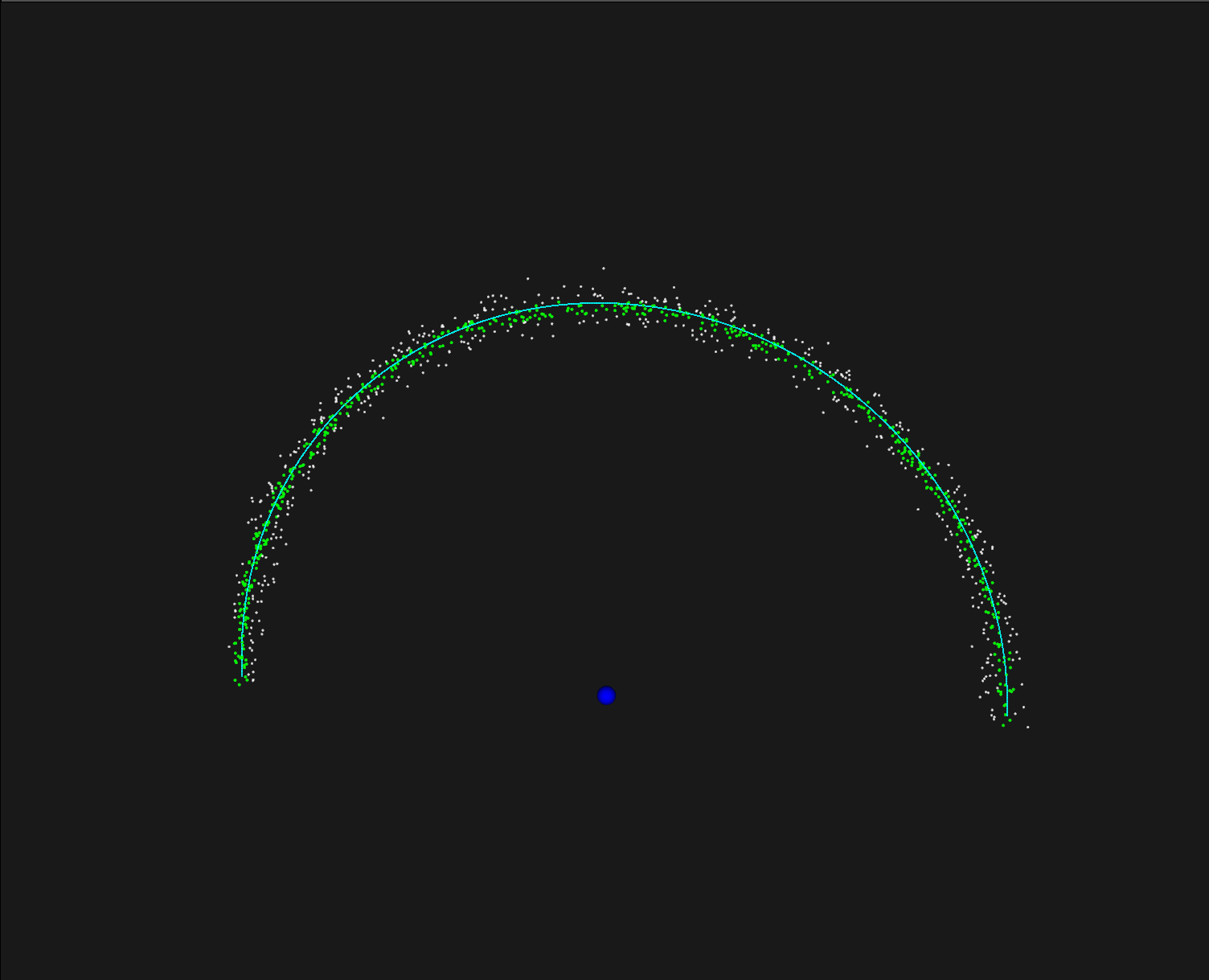 线激光拟合
线激光拟合
二.相关软件实现
软件界面如下图:
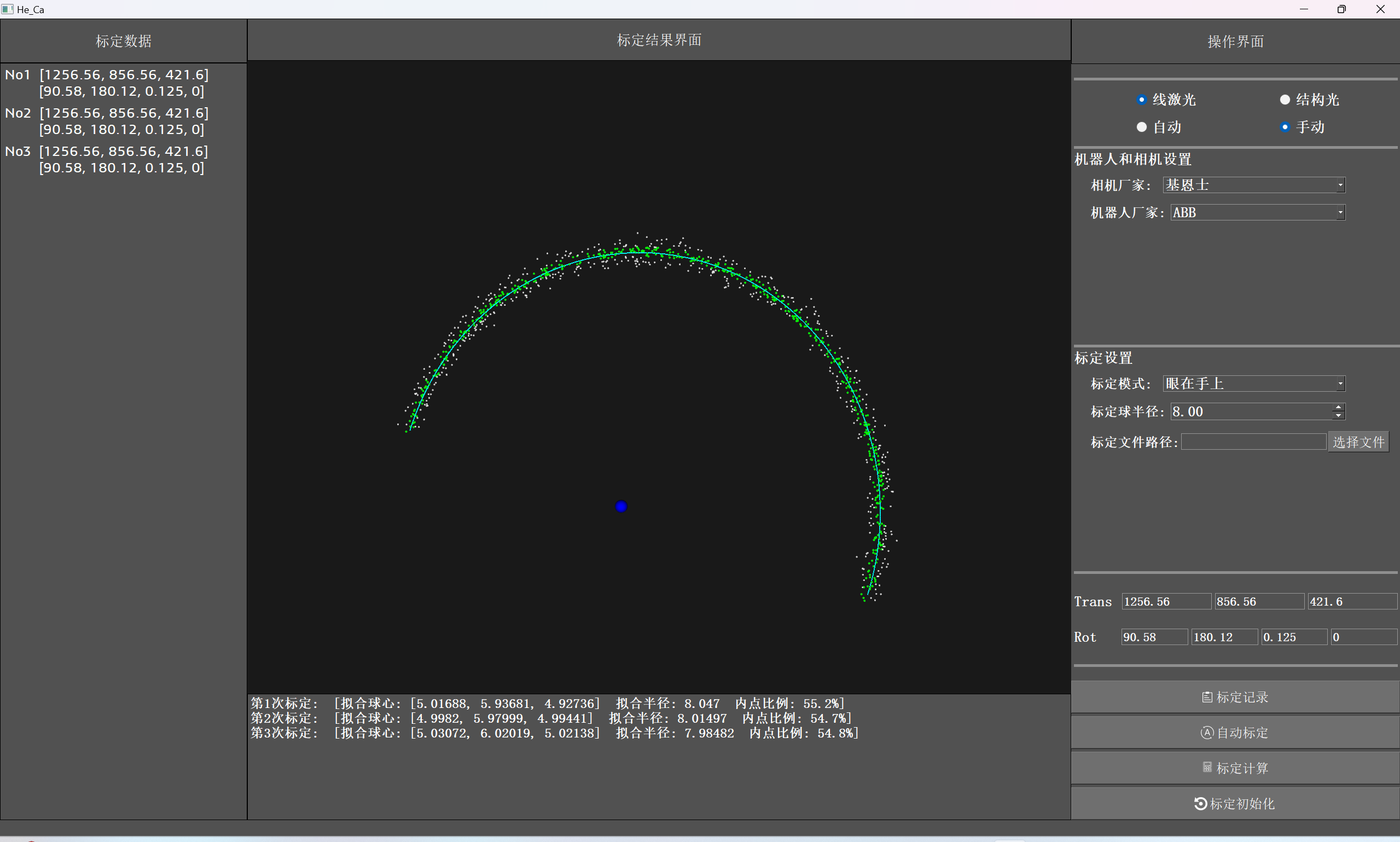
软件采用Qt及PCL和VTK在C++环境下进行开发,融合线激光手眼标定和结构光手眼标定两种场景
标定精度根据数据采集的精度和算法处理精度,基本可以保证在±0.8mm左右,如果标定数据更加精准,标定精度可以提高到±0.2mm左右

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









