




01概述
转向力矩波动是指在车辆转向过程中,转向力矩呈现出非恒定的变化现象。例如,正常情况下驾驶员转动方向盘时,期望转向力矩是相对平稳地随着转向角度变化而变化,但由于各种因素影响,实际的转向力矩可能会出现忽大忽小的波动情况。它可以是周期性的变化,也可能是不规则的变化。对于周期性波动主要与转向系统的十字万向节的不等速特性和布置方案有关。
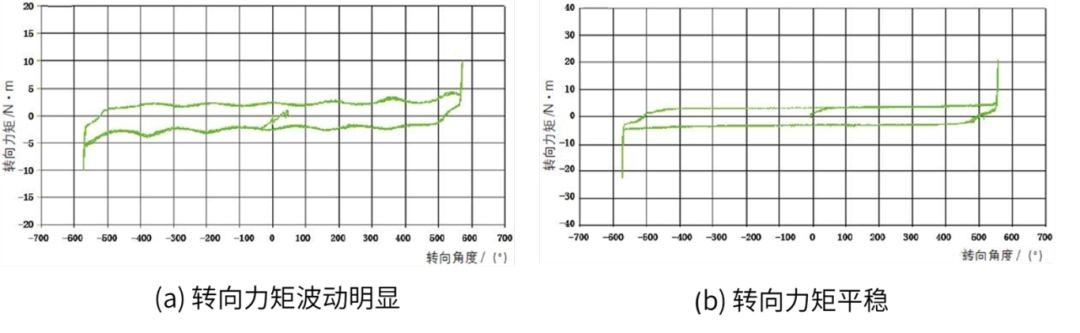
图1 原地转向方向盘转向力矩曲线图
02 转向力矩波动理论
对于单十字万向节,设主动叉由初始位置转过φ_1角,从动叉相应转过φ_2角,两轴夹角为α,则从动叉与主动叉转角关系为:
tan〖φ_1=tan〖φ_2∙cosα 〗 〗
则从动轴的角速度ω_2与主动轴的角速度ω_1的关系为:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1897
1897

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









