




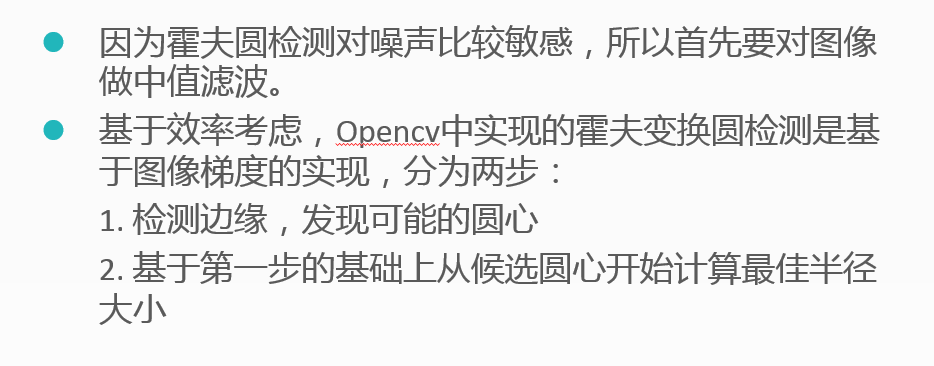
 本文展示了一个使用OpenCV进行霍夫圆变换检测圆形的示例代码。首先通过中值滤波减少噪声,并将图像转换为灰度图像,然后利用霍夫圆检测算法找出图像中的圆形,最后在原图上标记出检测到的圆。
本文展示了一个使用OpenCV进行霍夫圆变换检测圆形的示例代码。首先通过中值滤波减少噪声,并将图像转换为灰度图像,然后利用霍夫圆检测算法找出图像中的圆形,最后在原图上标记出检测到的圆。
Mat src, dst;
src = imread("D:/vcprojects/images/circle.png");
if (!src.data) {
printf("could not load image...\n");
return -1;
}
char INPUT_TITLE[] = "input image";
char OUTPUT_TITLE[] = "hough circle demo";
namedWindow(INPUT_TITLE, CV_WINDOW_AUTOSIZE);
namedWindow(OUTPUT_TITLE, CV_WINDOW_AUTOSIZE);
imshow(INPUT_TITLE, src);
// 中值滤波
Mat moutput;
medianBlur(src, moutput, 3);
cvtColor(moutput, moutput, CV_BGR2GRAY);
// 霍夫圆检测
vector<Vec3f> pcircles;
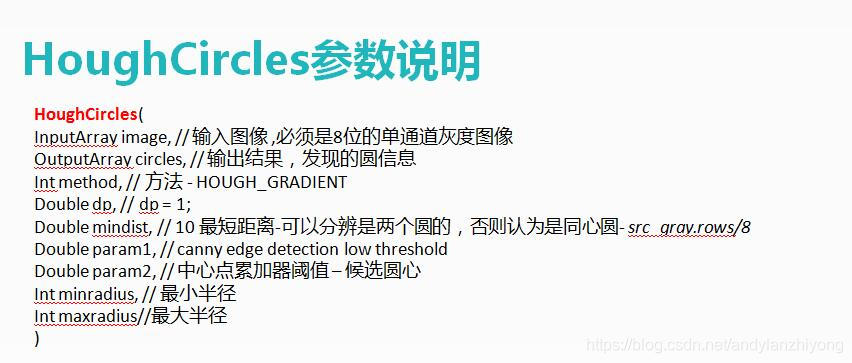
HoughCircles(moutput, pcircles, CV_HOUGH_GRADIENT, 1, 10, 100, 30, 5, 50);
src.copyTo(dst);
for (size_t i = 0; i < pcircles.size(); i++) {
Vec3f cc = pcircles[i];
circle(dst, Point(cc[0], cc[1]), cc[2], Scalar(0, 0, 255), 2, LINE_AA);
circle(dst, Point(cc[0], cc[1]), 2, Scalar(198, 23, 155), 2, LINE_AA);
}
imshow(OUTPUT_TITLE, dst);

















 4071
4071

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









