




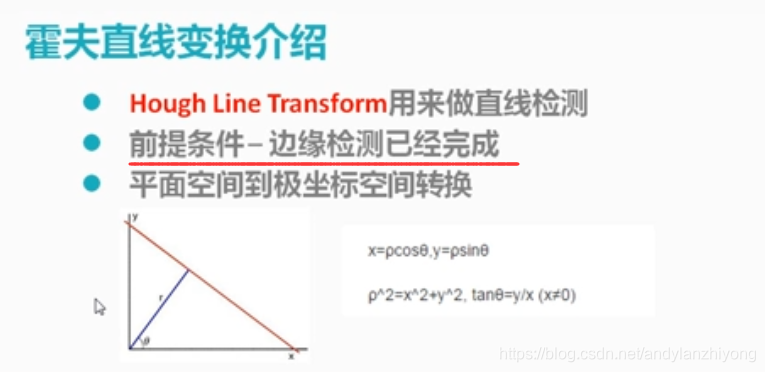
 本文介绍了一种使用Hough变换进行直线检测的方法。通过读取图片并应用Canny边缘检测,然后利用Hough标准直线变换找出图像中的直线,并将检测到的直线在原图像上标记出来。
本文介绍了一种使用Hough变换进行直线检测的方法。通过读取图片并应用Canny边缘检测,然后利用Hough标准直线变换找出图像中的直线,并将检测到的直线在原图像上标记出来。
示例代码:
Mat src, src_gray, dst;
src = imread("D:/vcprojects/images/lines.png");
if (!src.data) {
printf("could not load image...\n");
return -1;
}
char INPUT_TITLE[] = "input image";
char OUTPUT_TITLE[] = "hough-line-detection";
namedWindow(INPUT_TITLE, CV_WINDOW_AUTOSIZE);
namedWindow(OUTPUT_TITLE, CV_WINDOW_AUTOSIZE);
imshow(INPUT_TITLE, src);
// extract edge
Canny(src, src_gray, 150, 200);
cvtColor(src_gray, dst, CV_GRAY2BGR);
imshow("edge image", src_gray);
vector<Vec2f> lines;
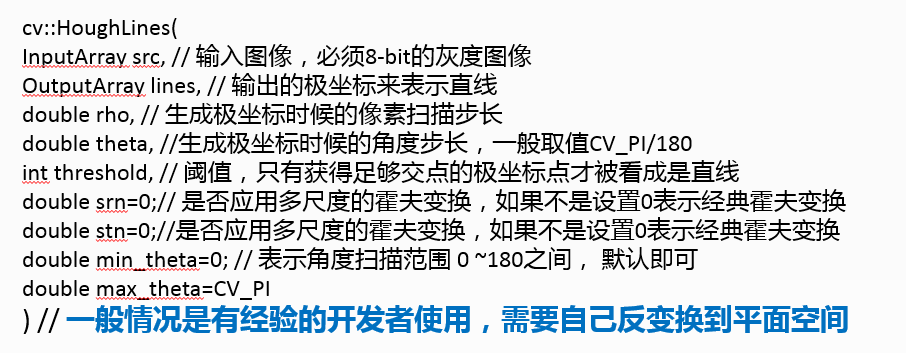
HoughLines(src_gray, lines, 1, CV_PI / 180, 150, 0, 0);
for (size_t i = 0; i < lines.size(); i++) {
float rho = lines[i][0]; // 极坐标中的r长度
float theta = lines[i][1]; // 极坐标中的角度
Point pt1, pt2;
double a = cos(theta), b = sin(theta);
double x0 = a*rho, y0 = b*rho;
// 转换为平面坐标的四个点
pt1.x = cvRound(x0 + 1000 * (-b));
pt1.y = cvRound(y0 + 1000 * (a));
pt2.x = cvRound(x0 - 1000 * (-b));
pt2.y = cvRound(y0 - 1000 * (a));
line(dst, pt1, pt2, Scalar(0, 0, 255), 1, CV_AA);
}
/*
vector<Vec4f> plines;
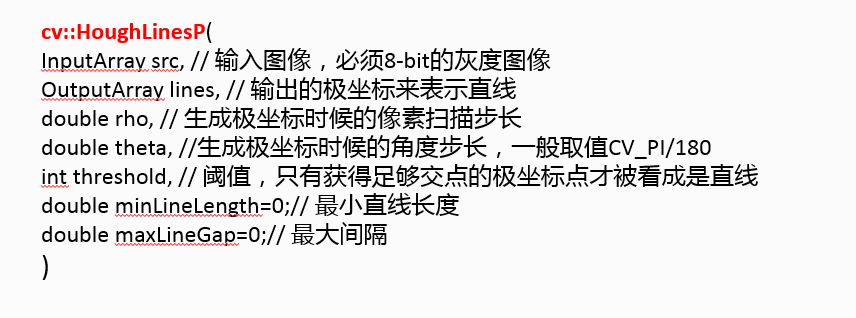
HoughLinesP(src_gray, plines, 1, CV_PI / 180.0, 10, 0, 10);
Scalar color = Scalar(0, 0, 255);
for (size_t i = 0; i < plines.size(); i++) {
Vec4f hline = plines[i];
line(dst, Point(hline[0], hline[1]), Point(hline[2], hline[3]), color, 3, LINE_AA);
}*/
imshow(OUTPUT_TITLE, dst);
程序结果:


















 5380
5380

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









