




 高德地图通过双端融合、组件化和研发中台建设,解决了代码耦合、平台工具落后等问题,实现了架构优化。通过下沉C++、动态UI框架和组件化,提升了App的稳定性和开发效率,减少了发版周期和崩溃率。未来,高德将进一步探索业务动态化,实现从公车到Feature Team的转变,提高灵活性和并行性。
高德地图通过双端融合、组件化和研发中台建设,解决了代码耦合、平台工具落后等问题,实现了架构优化。通过下沉C++、动态UI框架和组件化,提升了App的稳定性和开发效率,减少了发版周期和崩溃率。未来,高德将进一步探索业务动态化,实现从公车到Feature Team的转变,提高灵活性和并行性。
讲师介绍
郝仁杰,高德地图无线开发专家。在7月13日落幕的2019年ArchSummit峰会上就高德地图近几年的App架构演化和实践进行了分享。
背景概述
高德是国内领先的数字地图内容、导航和位置服务解决方案提供商,端上分手机和车机两条主线。近年来,高德业务迅猛发展,人员规模急速扩张,代码量急剧膨胀,如何提高团队高效并行作战的能力,端架构在一致性和动态性方面做了很多尝试:从最初的双端原生单体架构,到地图引擎下沉C++,再到动态UI框架的建设,收到了一定的成效,但面对业务持续的高速发展,依然还有很多方面需要继续完善。
为了让业务开发有节奏的进行,项目上每年会制定一些公车计划。公车就是每个App版本,货物就是对应的产品功能,货物组装就是功能开发,公车计划即每年的发版计划,公车按照指定的时间来,把组装好的货物拉走。但由于双端代码差异较大、耦合严重、复用率低、职责不清晰、平台工具简陋等问题,公车并无法按照计划拉走货物,货物组装慢且质量差,迫使公车等待,导致整个版效周期长达3个月,崩溃率也高达万分之八,公车变成了伪公车。
执行方案
为了使伪公车变为真公车,需要解决双端差异问题、代码耦合问题和平台工具落后等问题,来提高稳定性、并行性和高效性。2018年端上通过双端融合、组件化和研发中台建设来达到目标。
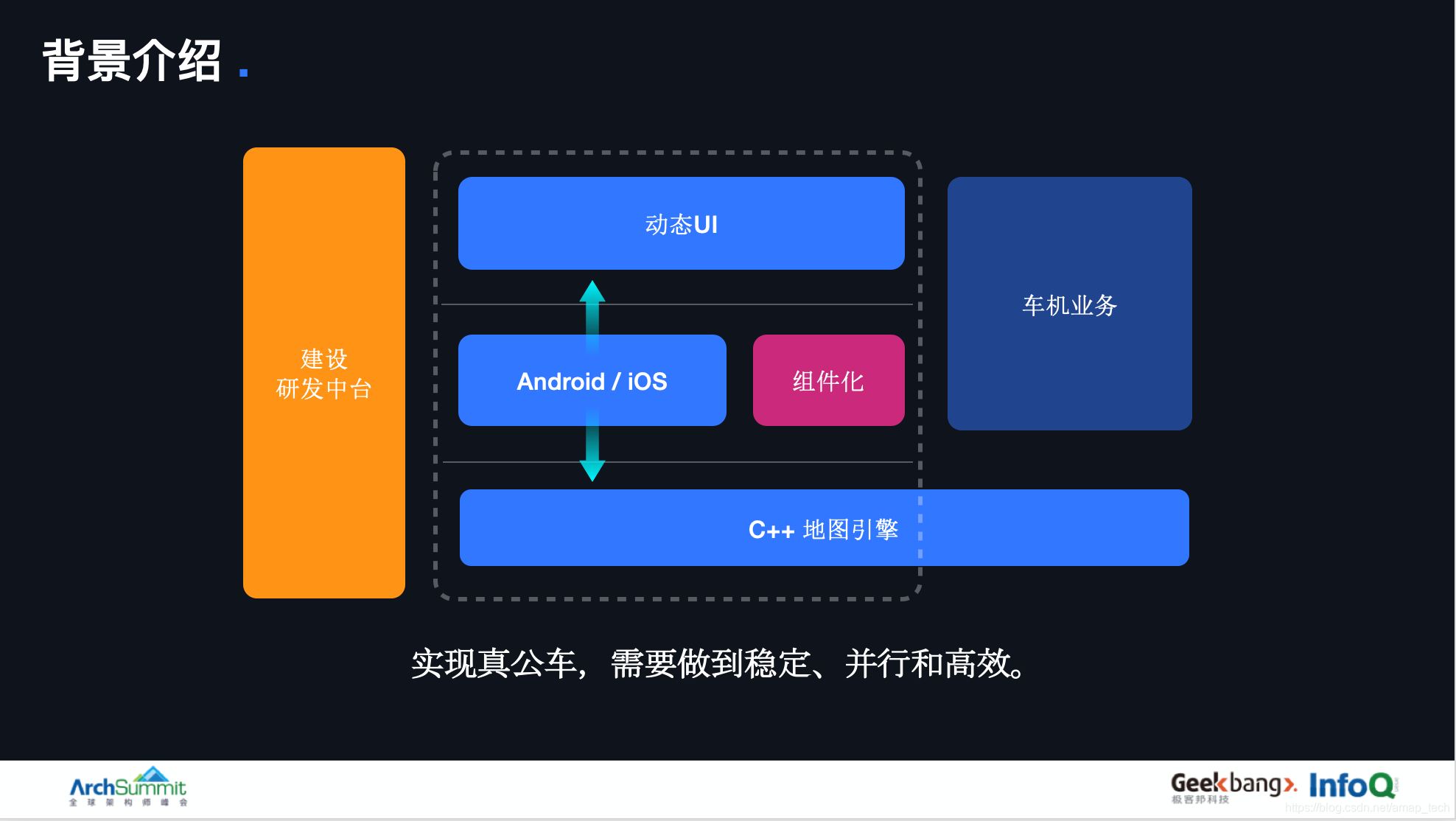
双端融合采用下沉C++、上漂动态UI和双端拉齐的方式来实现。下沉C++,实现了跨端的同时提高了性能;上漂动态UI同样实现了跨平台,且降低了开发门槛,让开发更简单,效率更高,同时也为未来动态化做好铺垫;双端拉齐更多的是借鉴双端的优势做到融合,同时保留双端的差异作为扩展,做到尽量保持一致的同时,也很好地兼容了Android/iOS平台的特性。
组件化参考了手淘Atlas、BeeHive和网易LDBusMediator等成熟的容器方
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 452
452

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









