



Windsurf 刚推出的时候(24年10-11月份的时候),其 agentic 模式,给人非常惊艳的感觉 ,我当时还写了篇文章:AI辅助编程:Agentic 火,要跟进么?但是考虑到当时的模型真正组合使用工具的能力还不够强(比如windsurf 是通过很多工程努力来完成agentic模式,而不是依赖大模型原生的这个能力的),所以我们当时决定不跟进。
auo-coder.chat 本身提供了 /chat(代码设计,信息获取) /coding(编程) /conf(对软件系统自身的配置) ,项目索引地图以及自动生成命令执行等相关能力,但是这些原子性的能力需要用户自己组合使用的。但我内心深处一直觉得,应该可以上层再加一层,来让 auto-coder.chat 自己来决定如何组合这些原子能力最后完成编码工作。
随着R1和V3的发布,我当时敏感的意识到了中国辅助编程之路已经开启 AI辅助编程, 2025在中国正式起航, 并且整个春节无休快速完成了R1 的整合: 全球第一款内置 Deepseek R1 + V3 组合的AI辅助编程工具来了。但是整个春节期间,一直没有一个稳定的 R1/V3 供应商,导致我们的 agentic 模式用起来并不流畅,直到2月 喧嚣之后,2月份谁是 R1/V3 供应商的王者, 终于有了稳定的供应商,于是我们也能开发和测试我们这个能力了。我们通过 R1 来完成了指令的组合能力(类似cline,但比cline的tool 高阶很多)。
现在给大家看一个推理实例,效果应该是超过 windsurf 之类的agentic 的另外,windsurf 因为agentic最初的设计缺陷,导致现在集成 R1后工作效果非常不好,需要有不少调整。
先给大家一个结论,R1 在 auto-coder.chat 中带来的 agentic 编程体验,已经完全到了“生产”可用阶段。
下面来看,我提了一个需求后,R1 是如何自主使用 auto-coder.chat 提供的指令来完成全流程工作的。
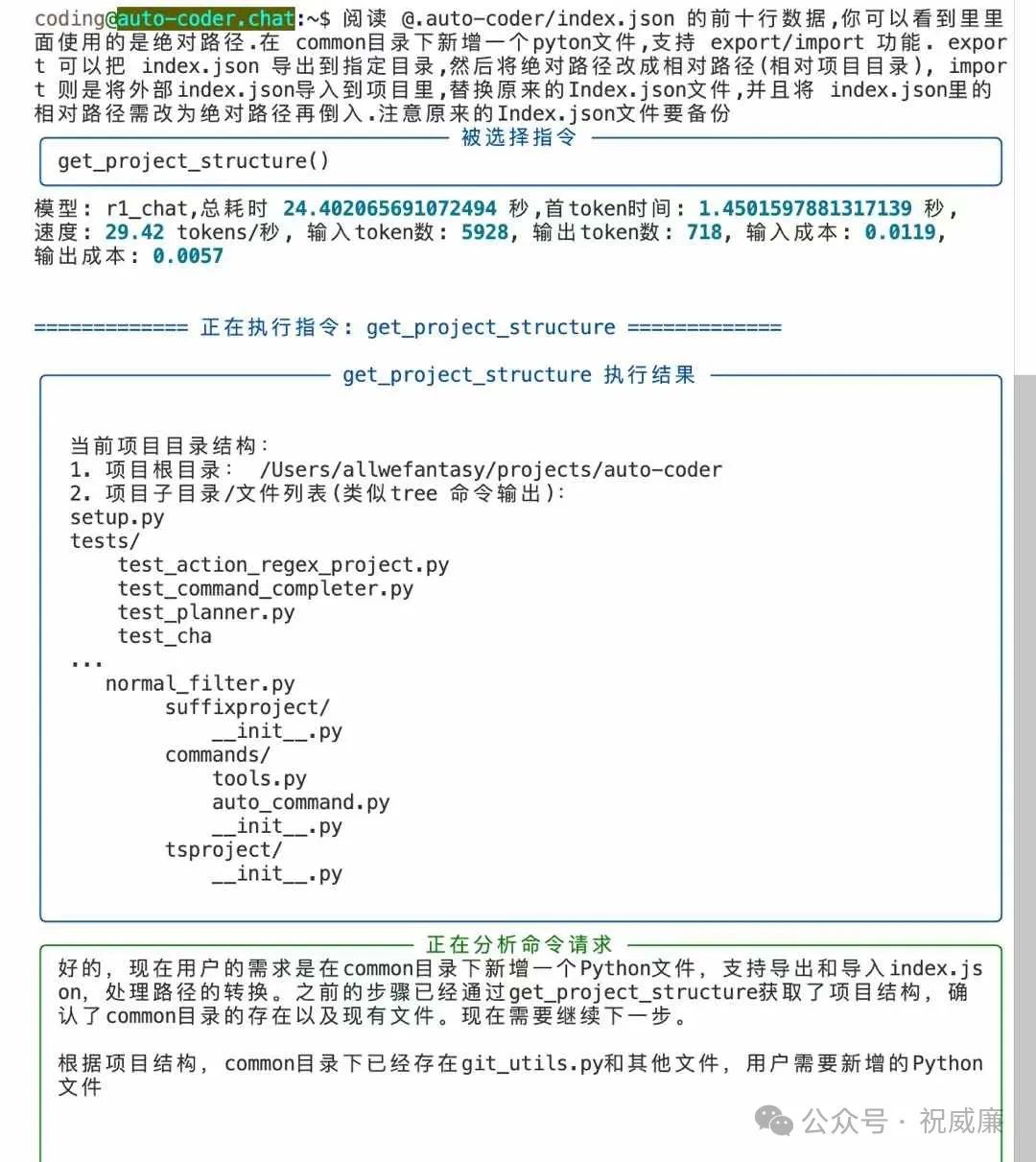
先看需求:

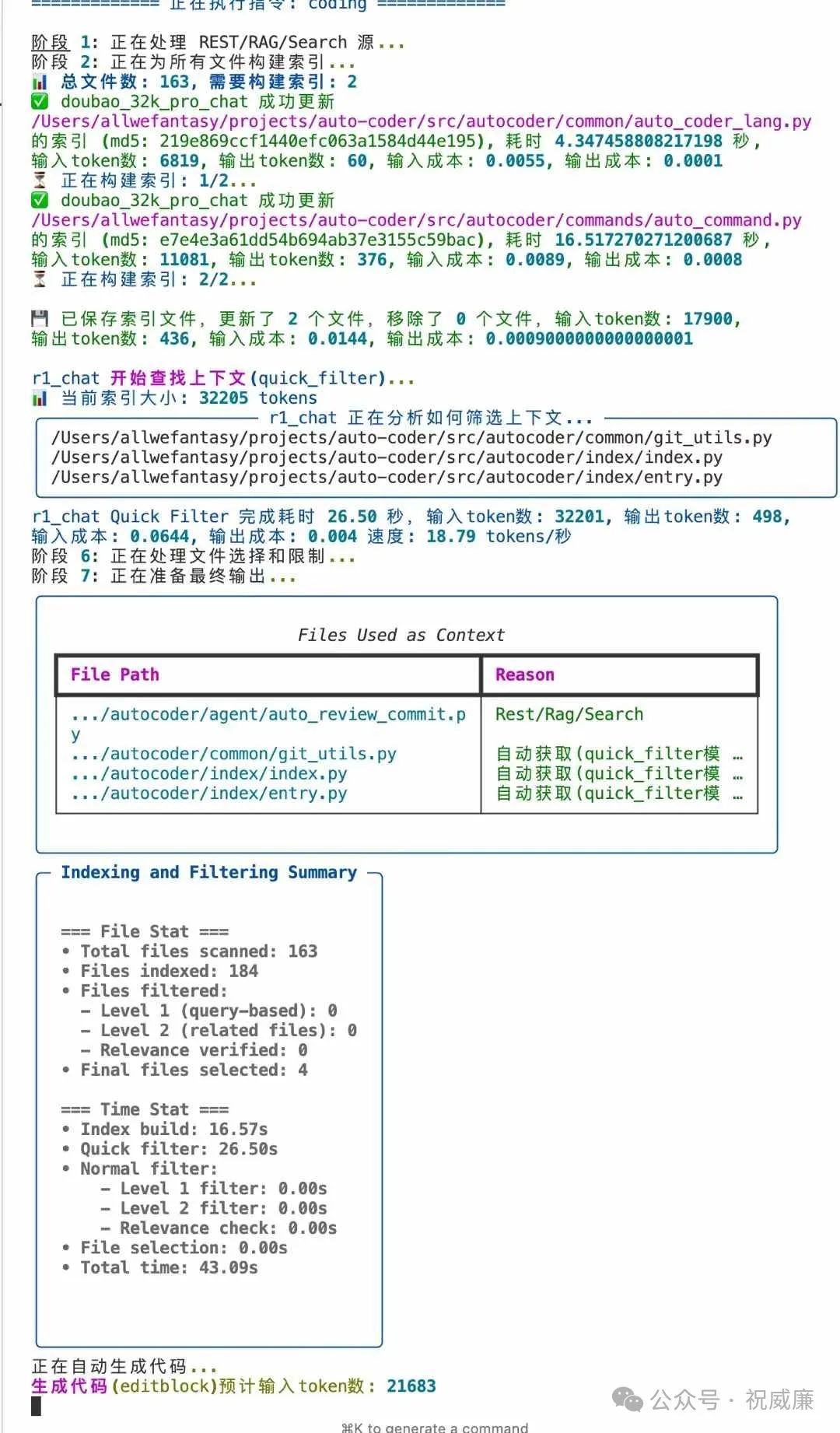
R1 的自动工作流程:
1. 获取整个项目的目录树,查看用户提的文件是否在。因为目录树排除了 .auto-coder 目录,所以他没找到。
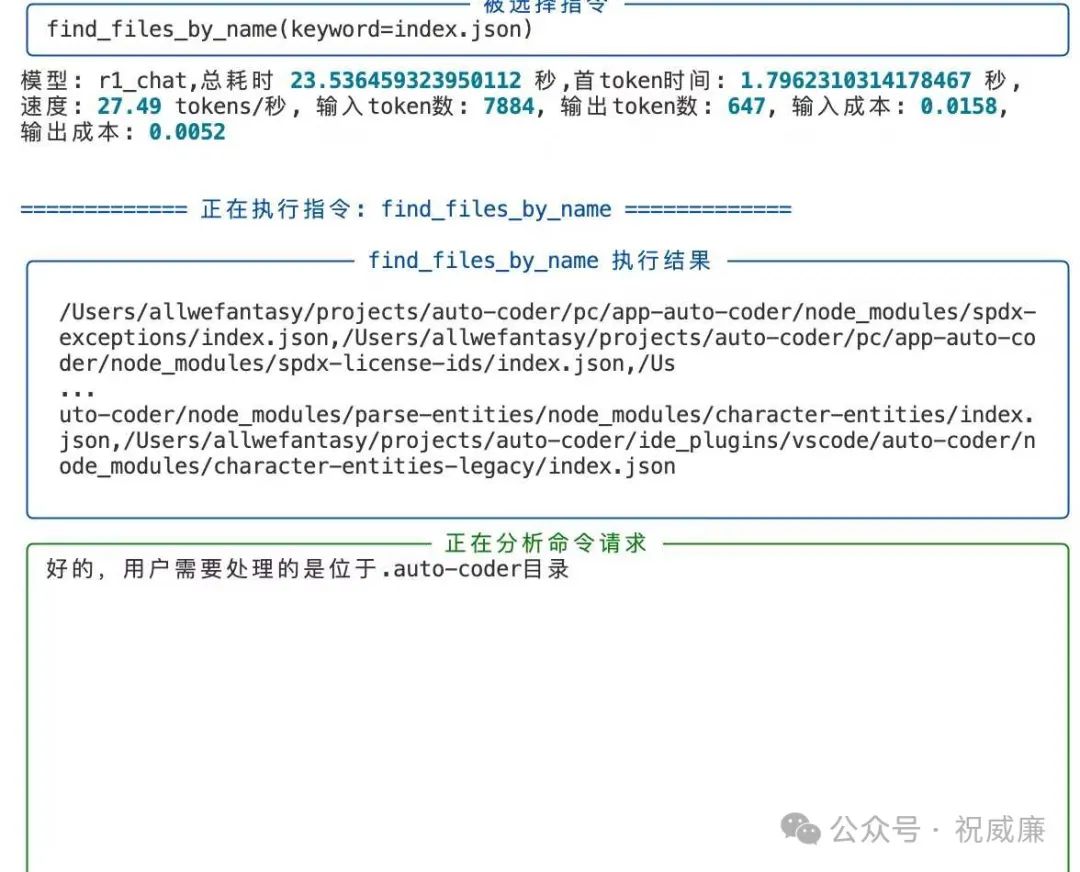
2. 接着他没放弃,通过文件名来查找,得到了文件列表
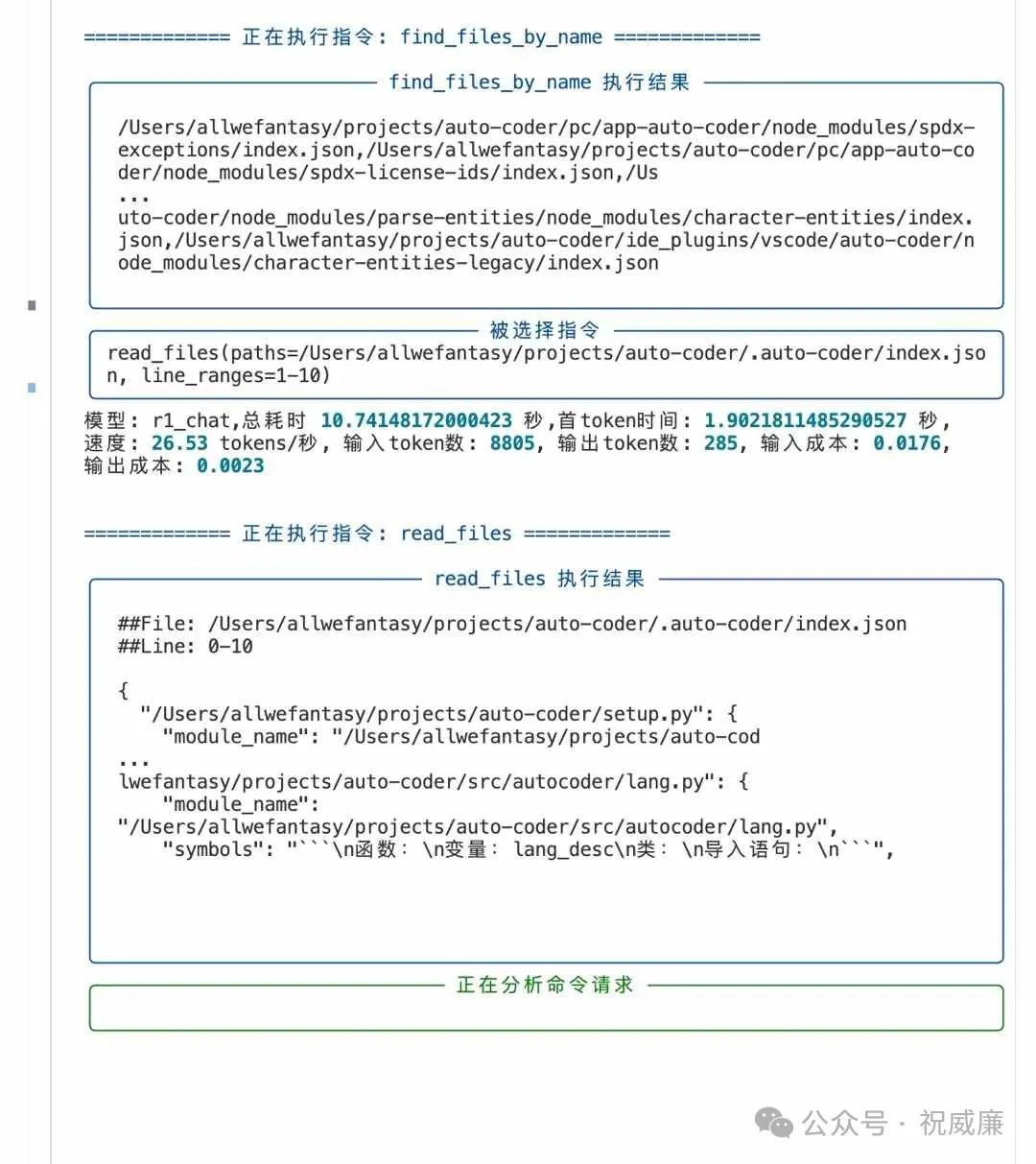
3. 自动选择了最匹配的那个,然后打开查看前面十行,发现确实是我描述的那样。
4. 调用coding 进行编程,并且根据他已经获得的信息,重新改写了我的需求然后调用了 coding 执行编程动作
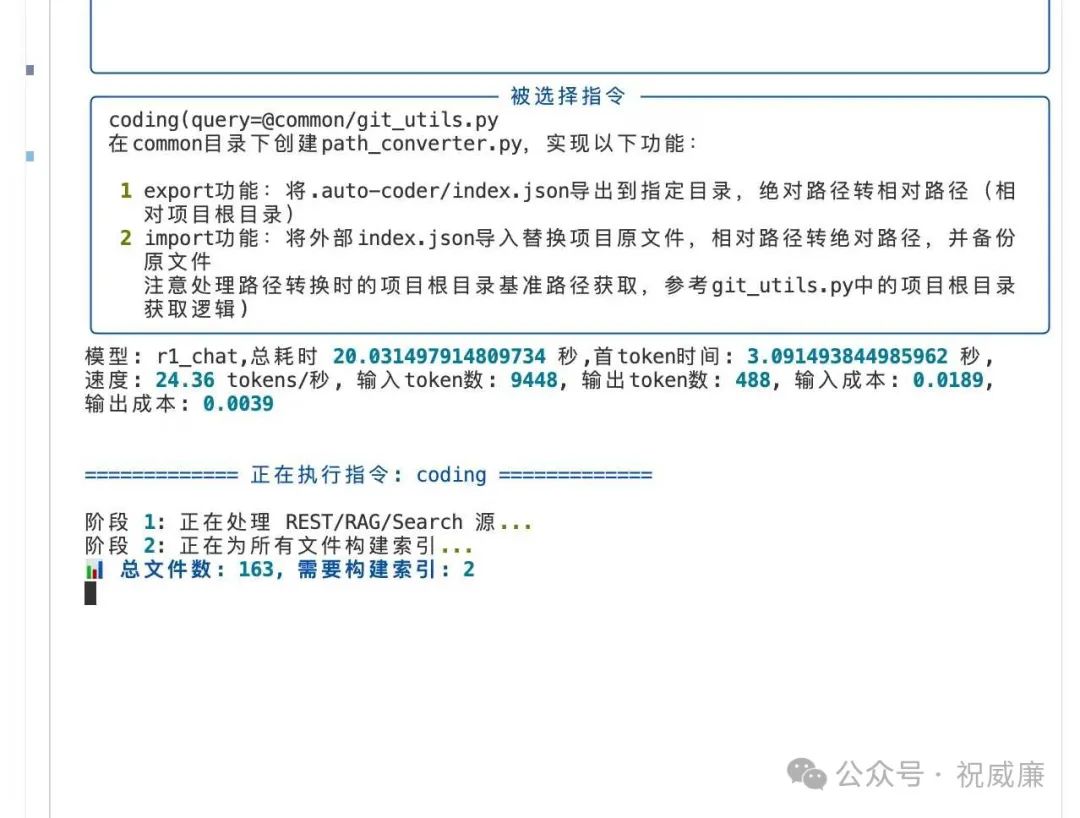
5. 现在开始执行编程
6. 代码完成合并
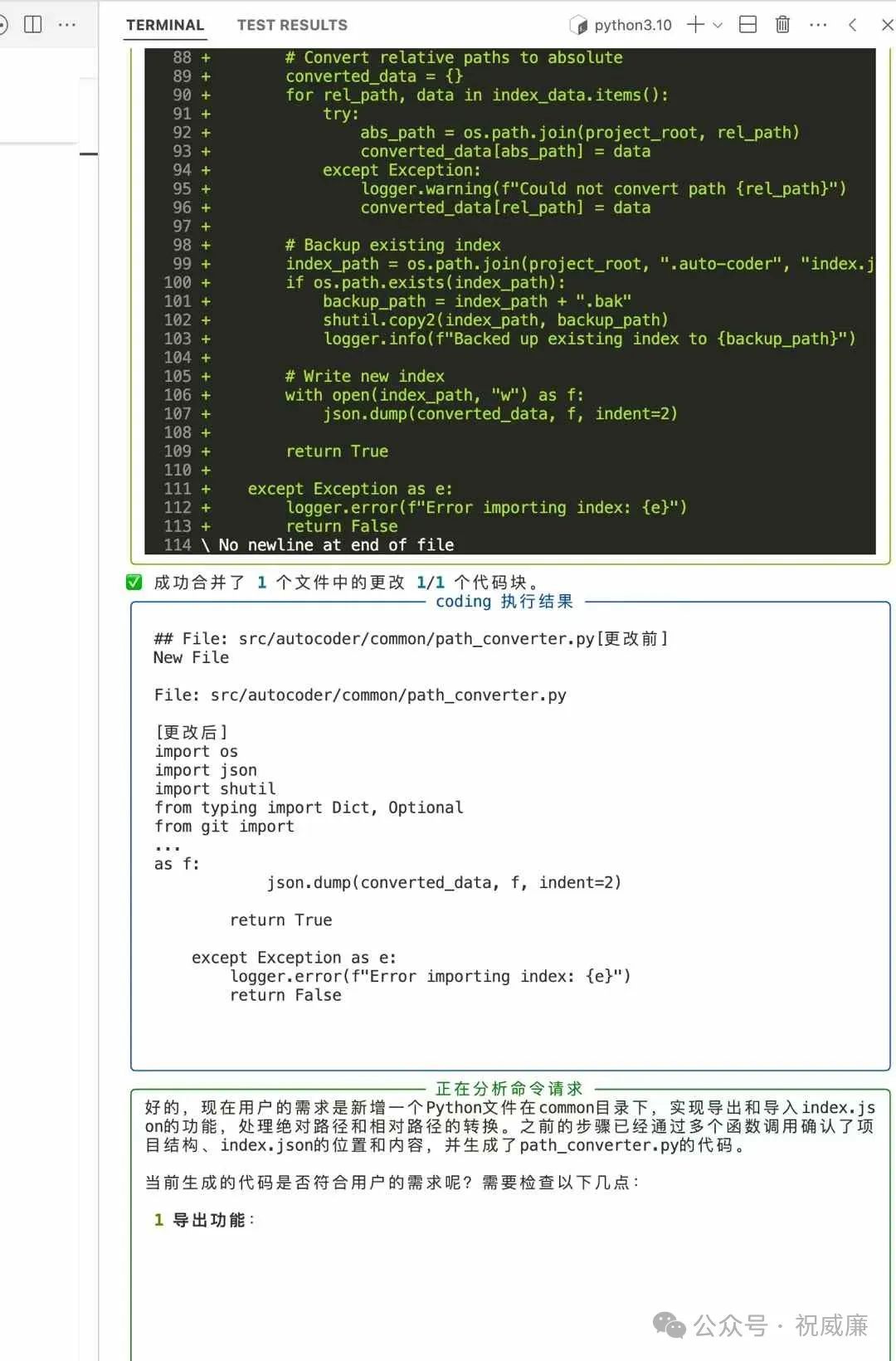
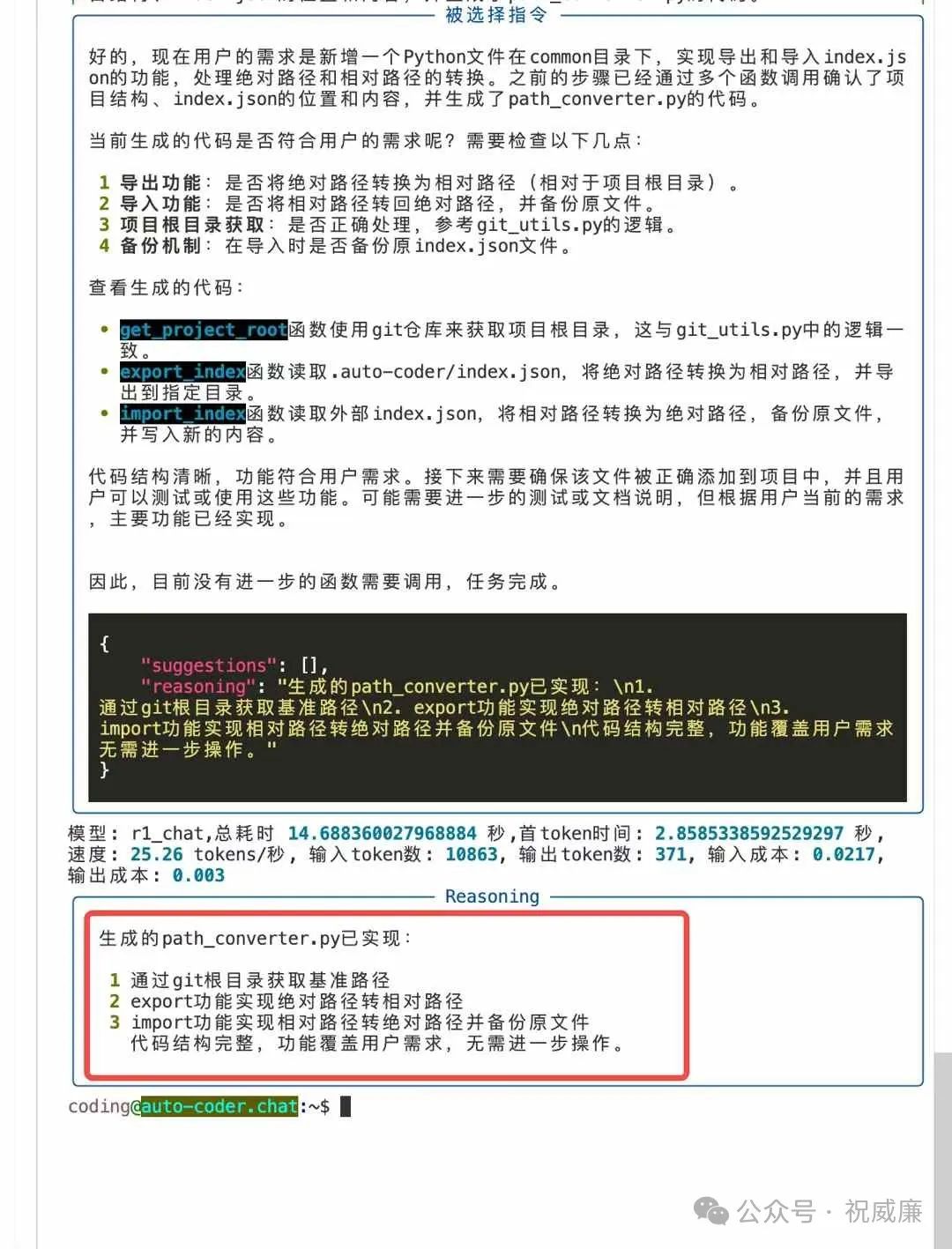
7. 会查看修改前后的代码,确定是否满足需求,这里他觉得满足了,所以停止运行。
如果多尝试几次,你会发现类似的需求,推理流程实际发生会发生变化,但基本都能解决最后的问题。
比如有的时候他会找到多个文件(当然,这里主要是因为我只提供过了index.json, 然后确实存在多个同名的文件)他会主动寻求用户帮助:

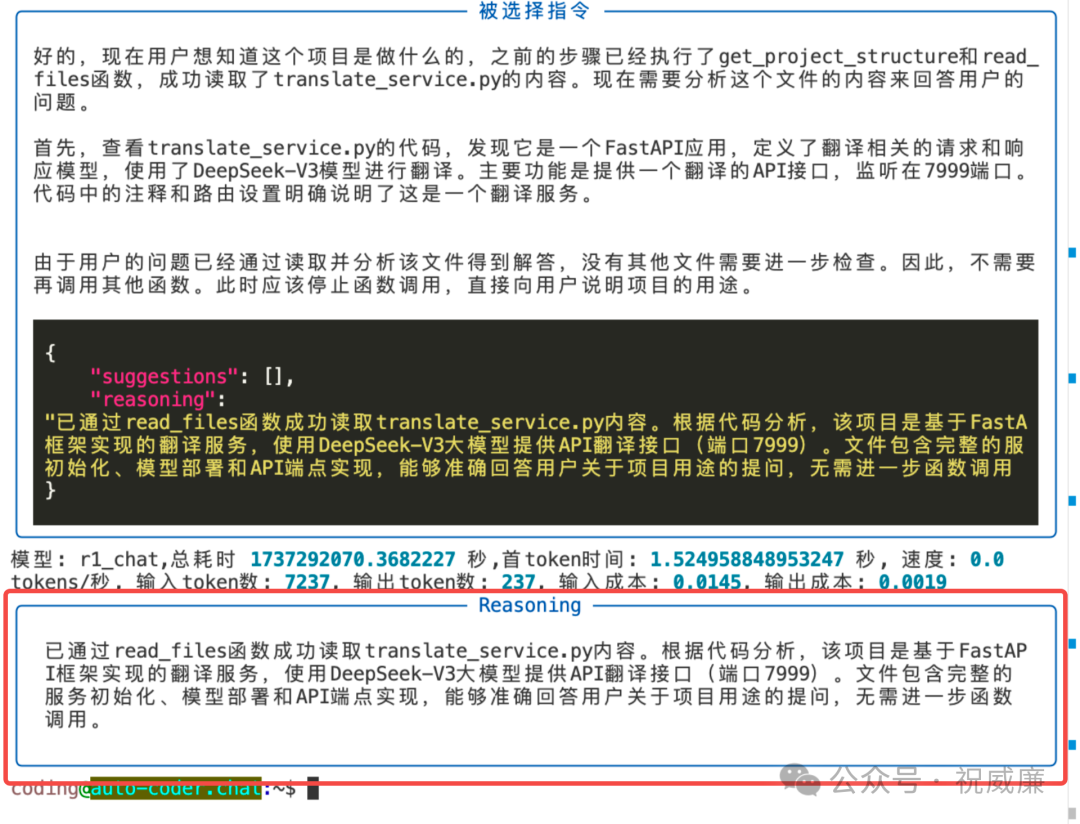
此外,R1 的意图猜测能力也足够强,能够非常好的自主选择非编程类的任务的响应。
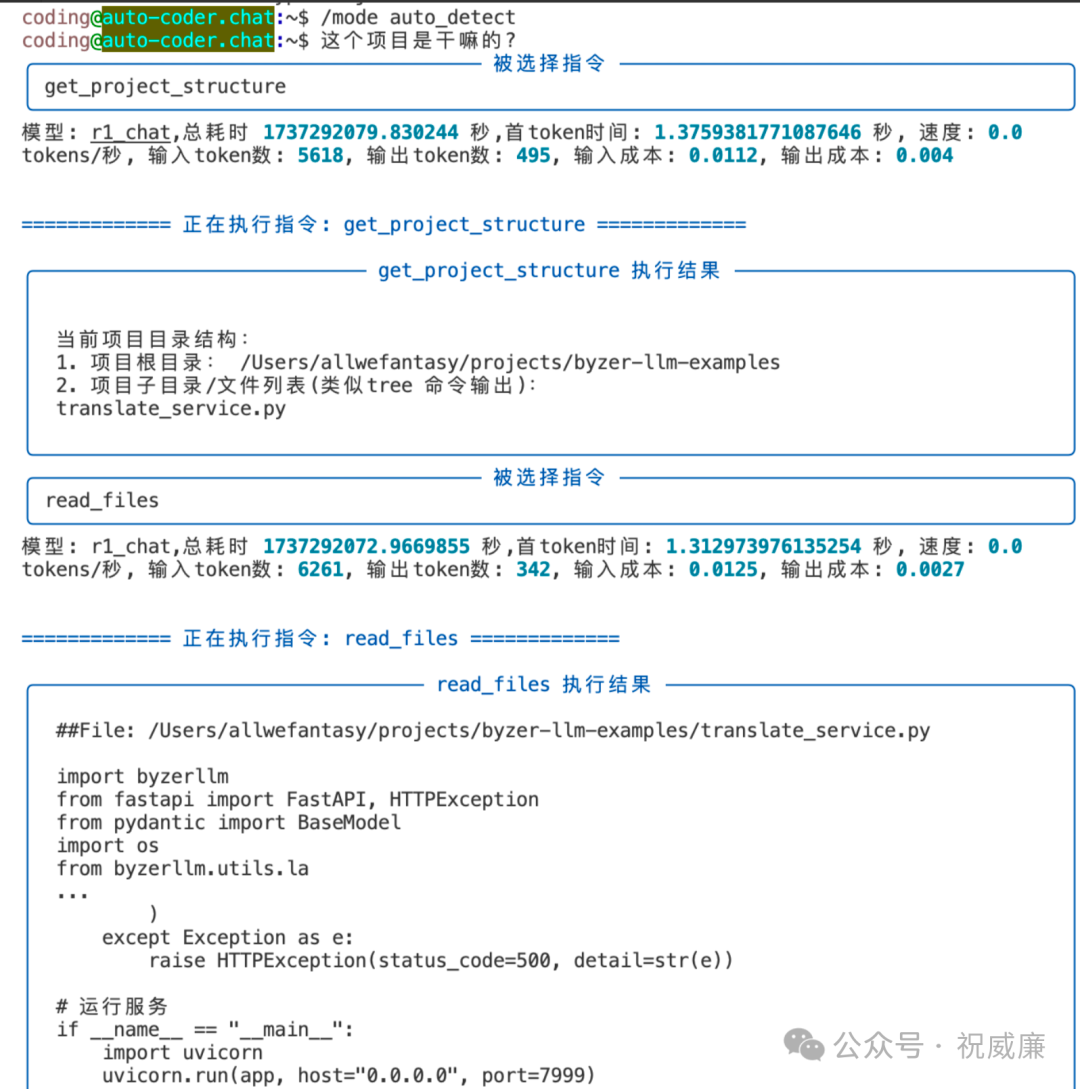
比如问一个项目是干嘛的(远比我以前实现的/ask 效果好,/ask于 软模拟cot 实现的)他会自主读取目录结构,然后尝试查看README, 以及相关的代码文件,最后给出项目描述:
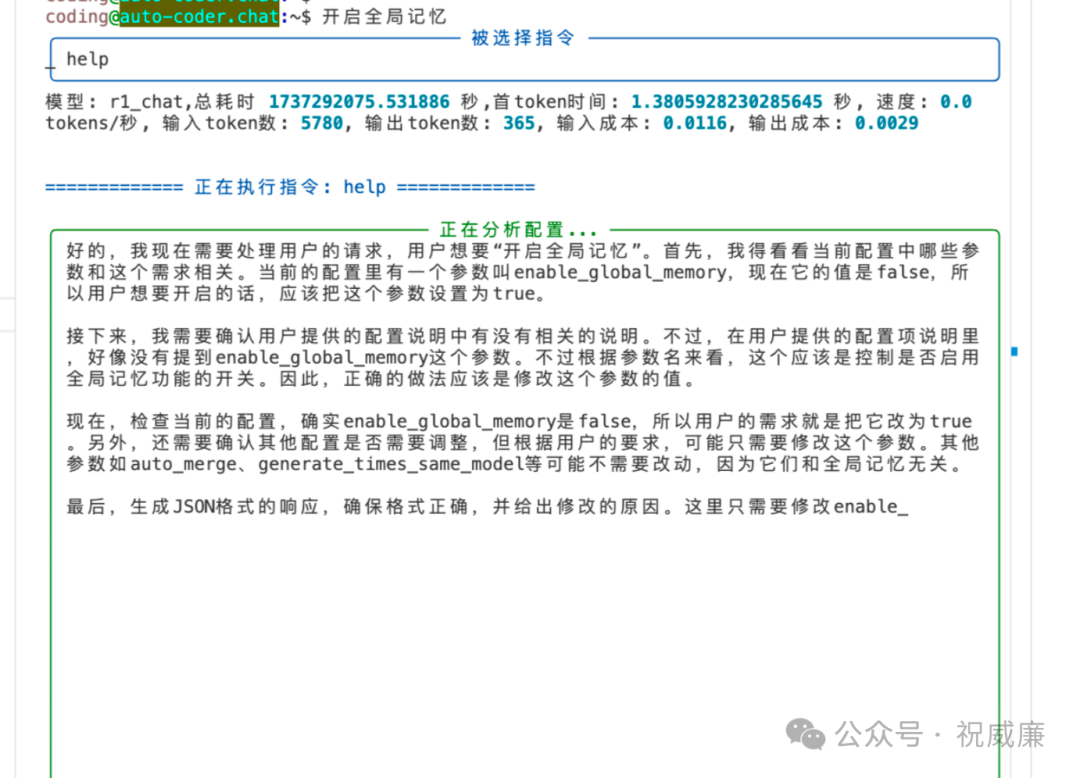
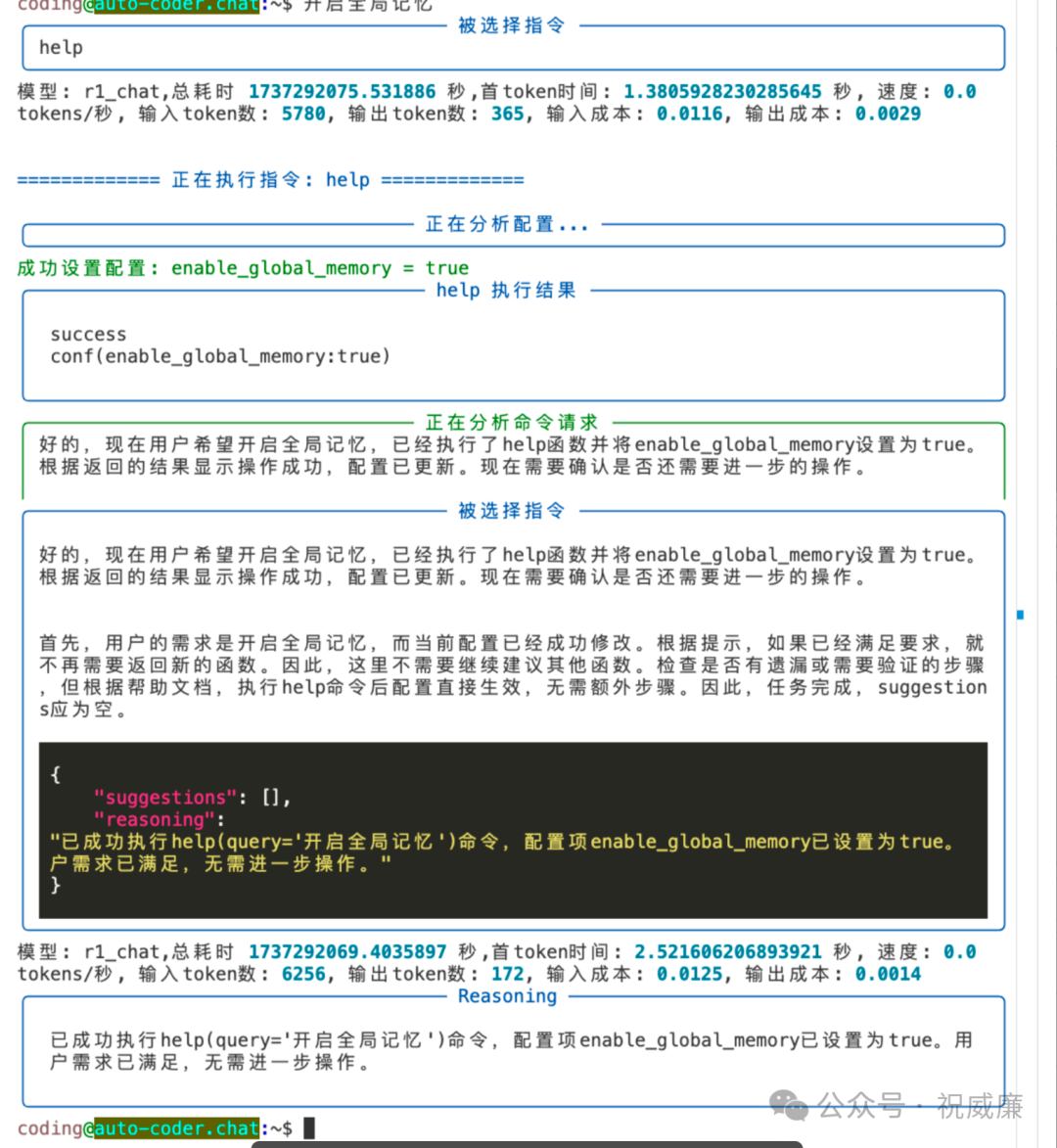
然后你还可以让他帮助你完成auto-coder.chat的配置:
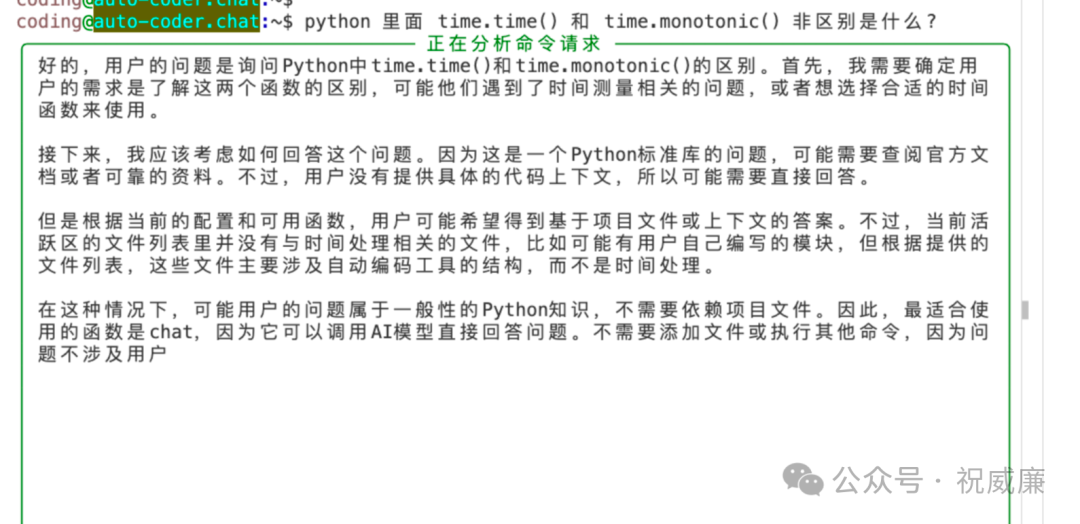
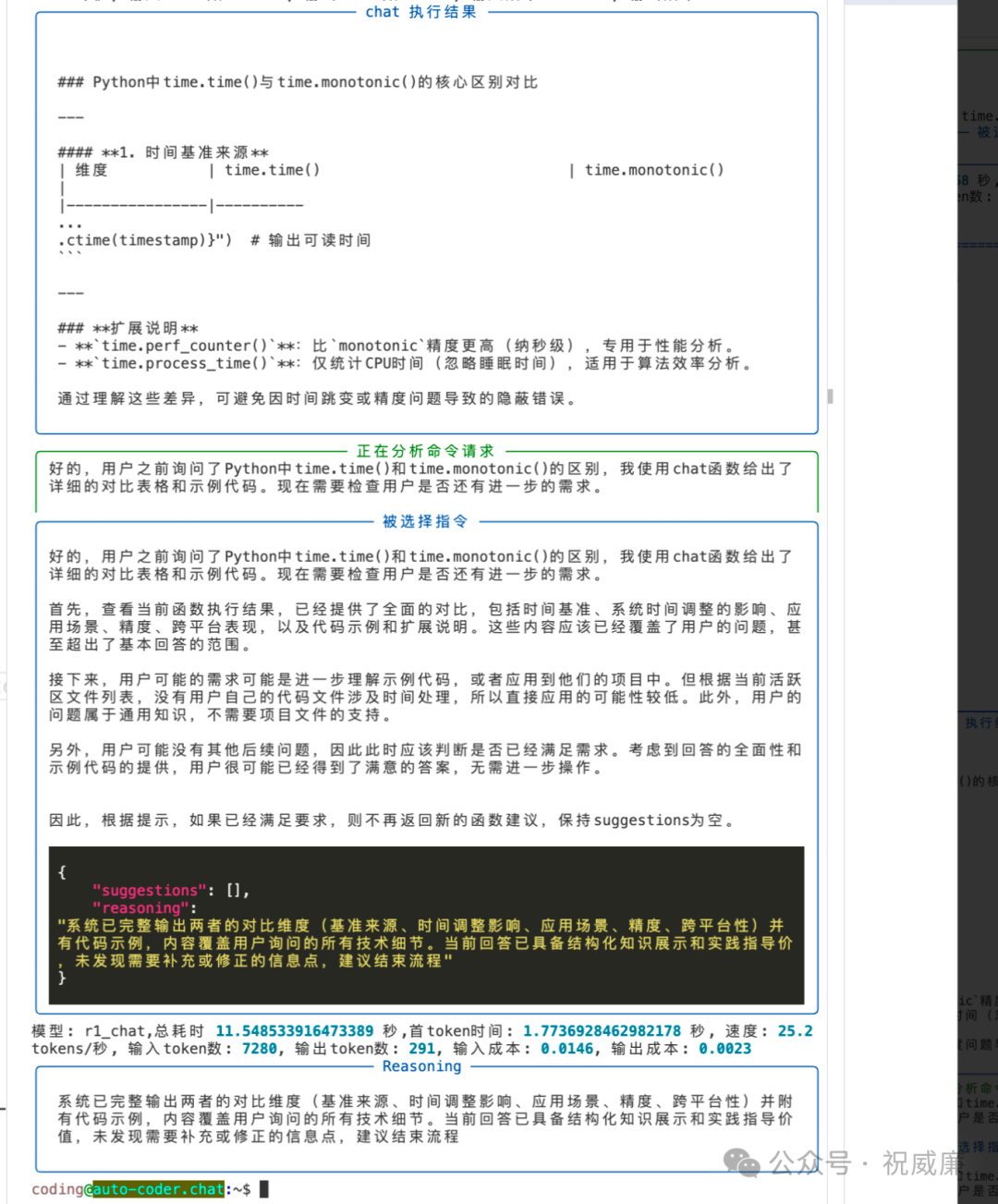
或者询问他问题,他会自动选择 chat 指令来和你交互:
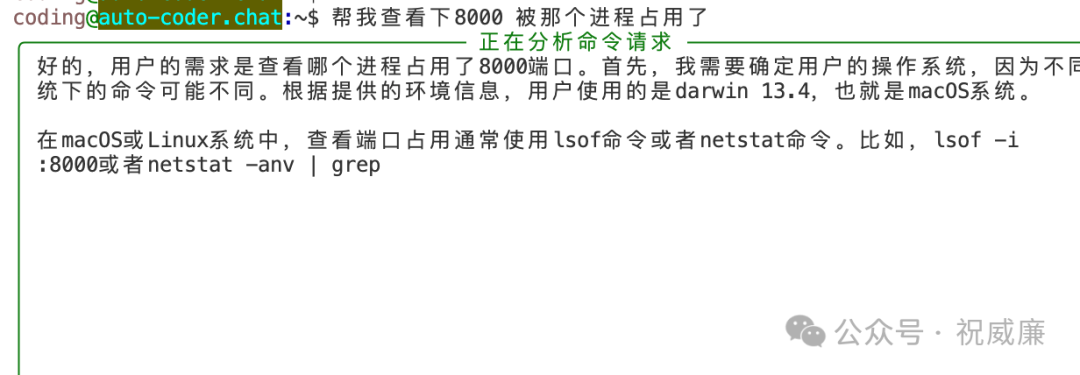
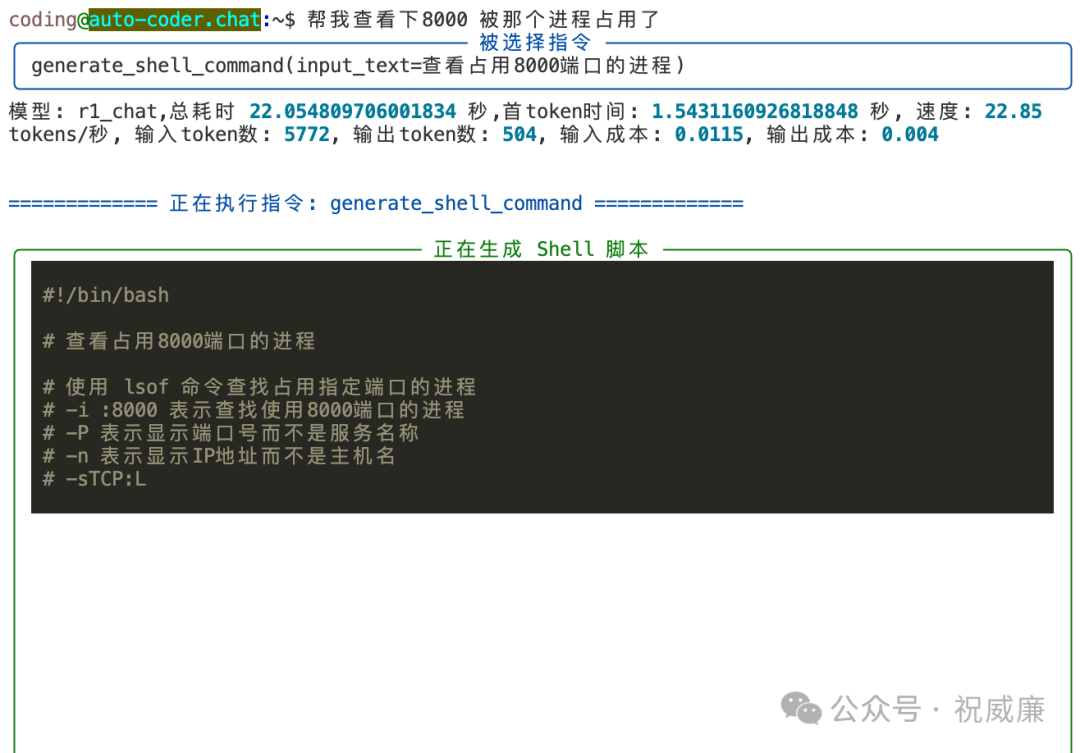
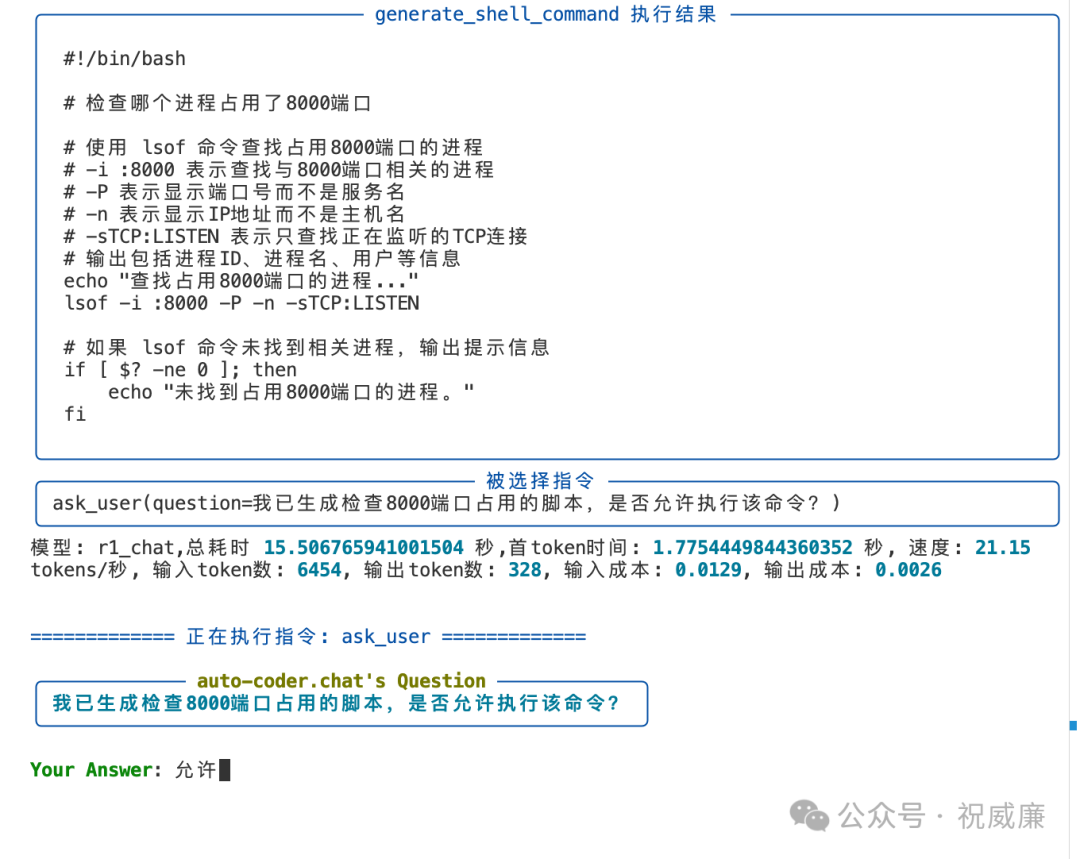
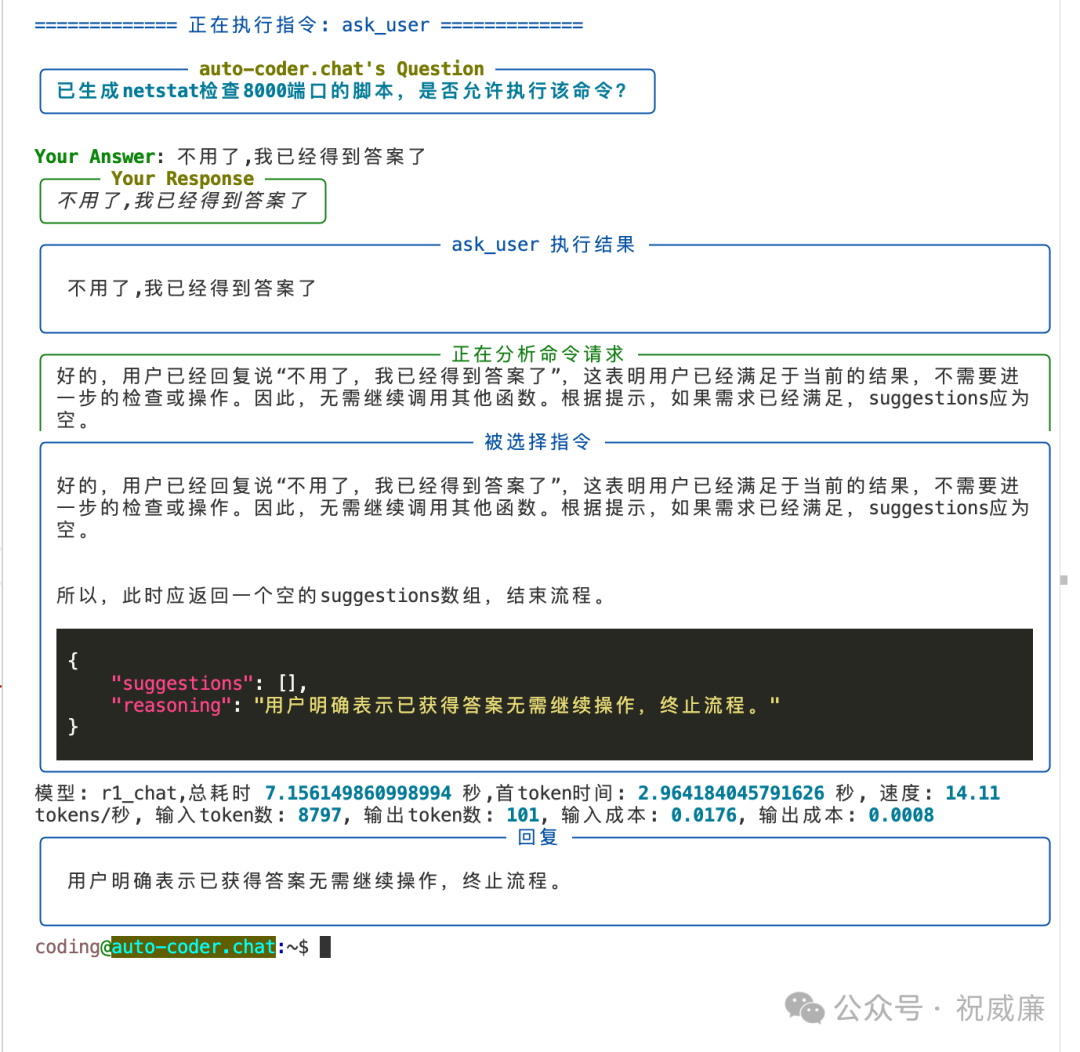
或者让他帮检查端口,启动应用等等各种繁琐的事情:
另外,得到为空,他还会交叉验证,此时你喊停止就可以:
最后的结论: R1 带来的Agentic 编程体验已经相当于可以“量产”了。大家可以使用 auto-coder.chat 体验和复现。
https://uelng8wukz.feishu.cn/wiki/NhPNwSRcWimKFIkQINIckloBncI?fromScene=spaceOverview

















 1022
1022

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









