







1首先把python3设置为默认python
echo alias python=python3 >> ~/.bashrc
source ~/.bashrc
2直接pip安装
pip3 install opencv-python
pip3 install opencv-contrib-python中间报错:ModuleNotFoundError: No module named 'skbuild'
于是执行pip3 install skbuild
但还是不行,查百度,找到了解决方法
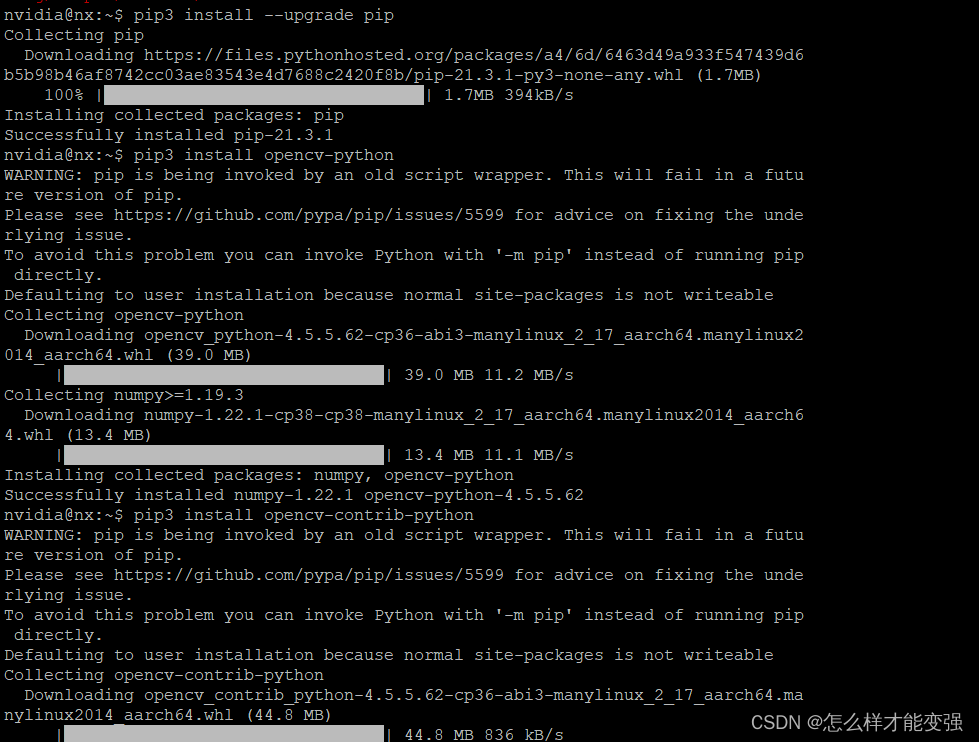
pip3 install --upgrade pip
再次执行
pip3 install opencv-python成功安装

(7条消息) 报错:ModuleNotFoundError: No module named ‘skbuild‘_GungnirsPledge的博客-优快云博客
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1042
1042

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











