







这两个滤波器的作用和用法自己去别的地方了解,这里只讲如何设计出符合所需要求的滤波器。
超前滞后滤波器
超前(lead)滤波器
H ( s ) = T ⋅ s + 1 A ⋅ T ⋅ s + 1 H(s) = \frac{T \cdot s + 1}{A \cdot T \cdot s + 1} H(s)=A⋅T⋅s+1T⋅s+1
滞后(lag)滤波器
H
(
s
)
=
A
⋅
T
⋅
s
+
1
T
⋅
s
+
1
H(s) = \frac{A \cdot T \cdot s + 1}{T \cdot s + 1}
H(s)=T⋅s+1A⋅T⋅s+1
其中
A
=
1
−
s
i
n
(
ϕ
180
π
)
1
+
s
i
n
(
ϕ
180
π
)
T
=
1
ω
m
⋅
A
\begin{aligned} A &= \frac{1 - sin(\frac{\phi}{180}\pi)}{1 + sin(\frac{\phi}{180}\pi)} \\ T &= \frac{1}{\omega_m \cdot \sqrt{A}} \end{aligned}
AT=1+sin(180ϕπ)1−sin(180ϕπ)=ωm⋅A1
ϕ
\phi
ϕ 是所需超前或者滞后的相位(degree)。
ω
m
\omega_m
ωm 是所需超前或者滞后的频率位置(rad)。
这两个滤波器的 ±3dB 截至频率为
1
T
⋅
1
−
2
⋅
A
2
\frac{1}{T \cdot \sqrt{1 - 2 \cdot A^2}}
T⋅1−2⋅A21。
举例
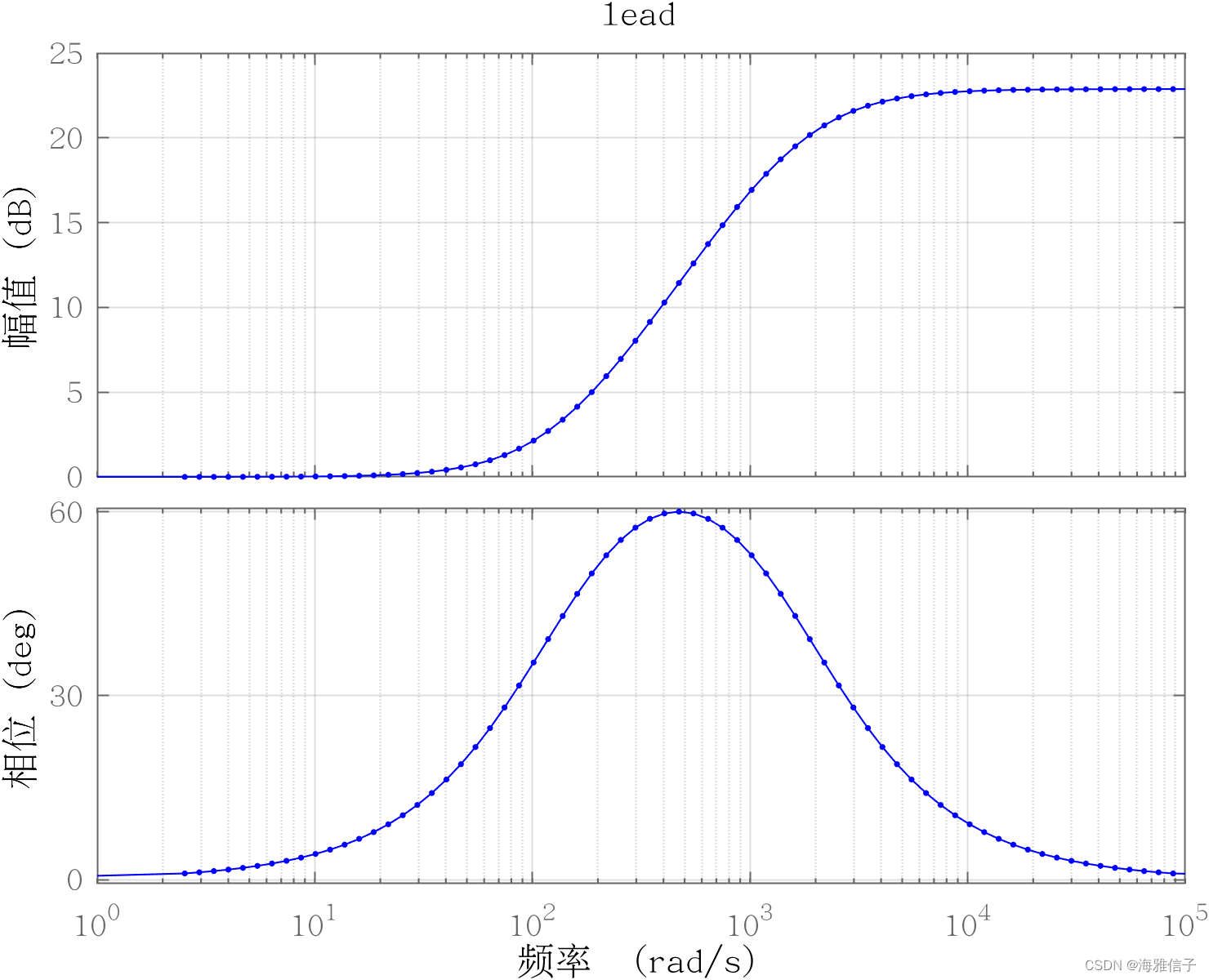
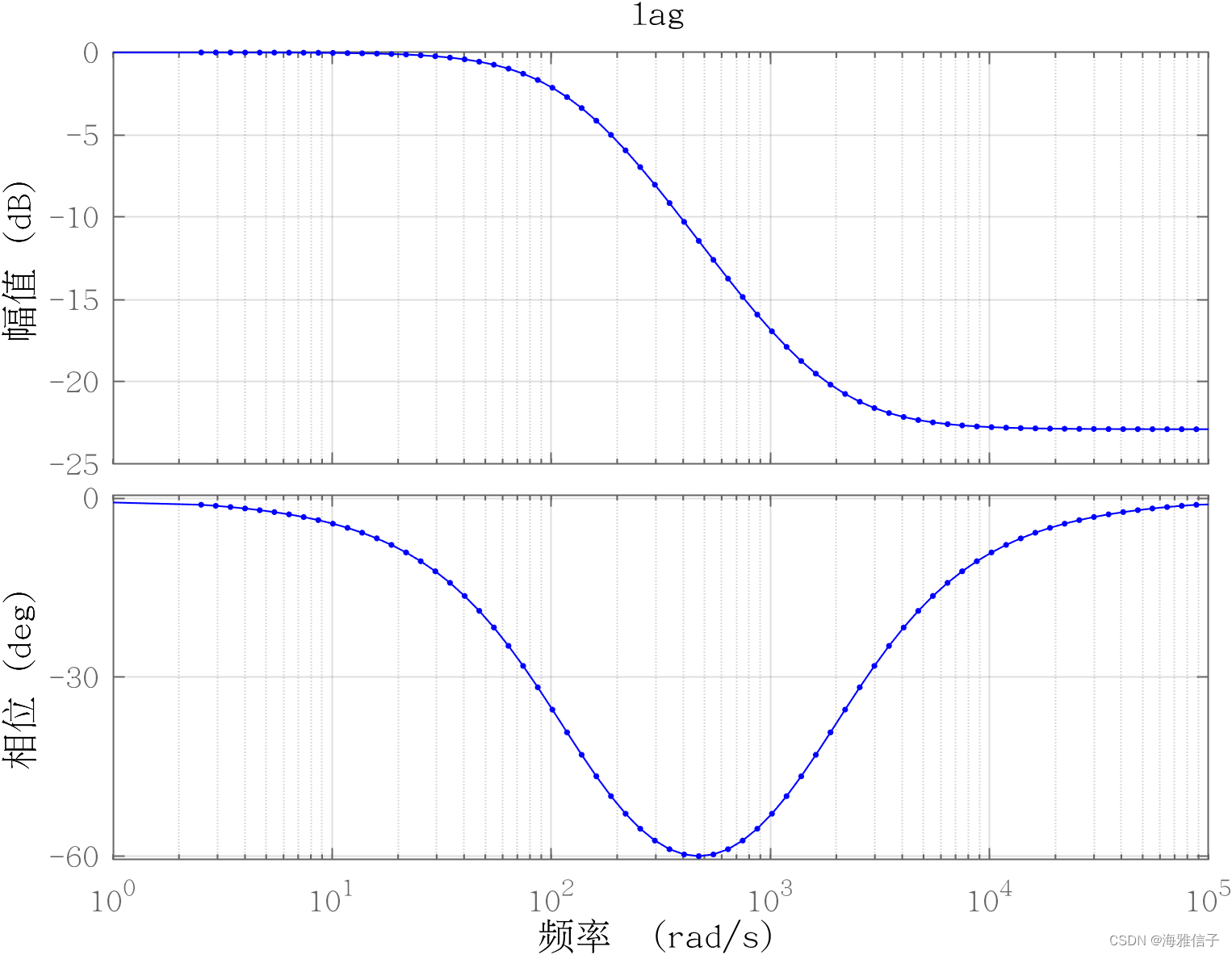
所需的滤波器需要在 75Hz 处提供 60° 相位的超前或滞后,则参数设置为:
ϕ
=
60
,
ω
m
=
75
⋅
2
⋅
π
\phi = 60, \omega_m = 75 \cdot 2 \cdot \pi
ϕ=60,ωm=75⋅2⋅π。
滤波器 bode 图如下:
超前
滞后


















 3753
3753

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









