



更新视频记录250605:
Webots
使用注意要点:
安装webot-ros包:
sudo apt install ros-jazzy-webots-ros2
sudo apt install ros-jazzy-webots-ros2
sudo apt install ros-jazzy-webots-ros2Reading package lists... Done
Building dependency tree... Done
Reading state information... Done
ros-jazzy-webots-ros2 is already the newest version (2025.0.0-1noble.20250520.223418).
20250520新鲜出炉。
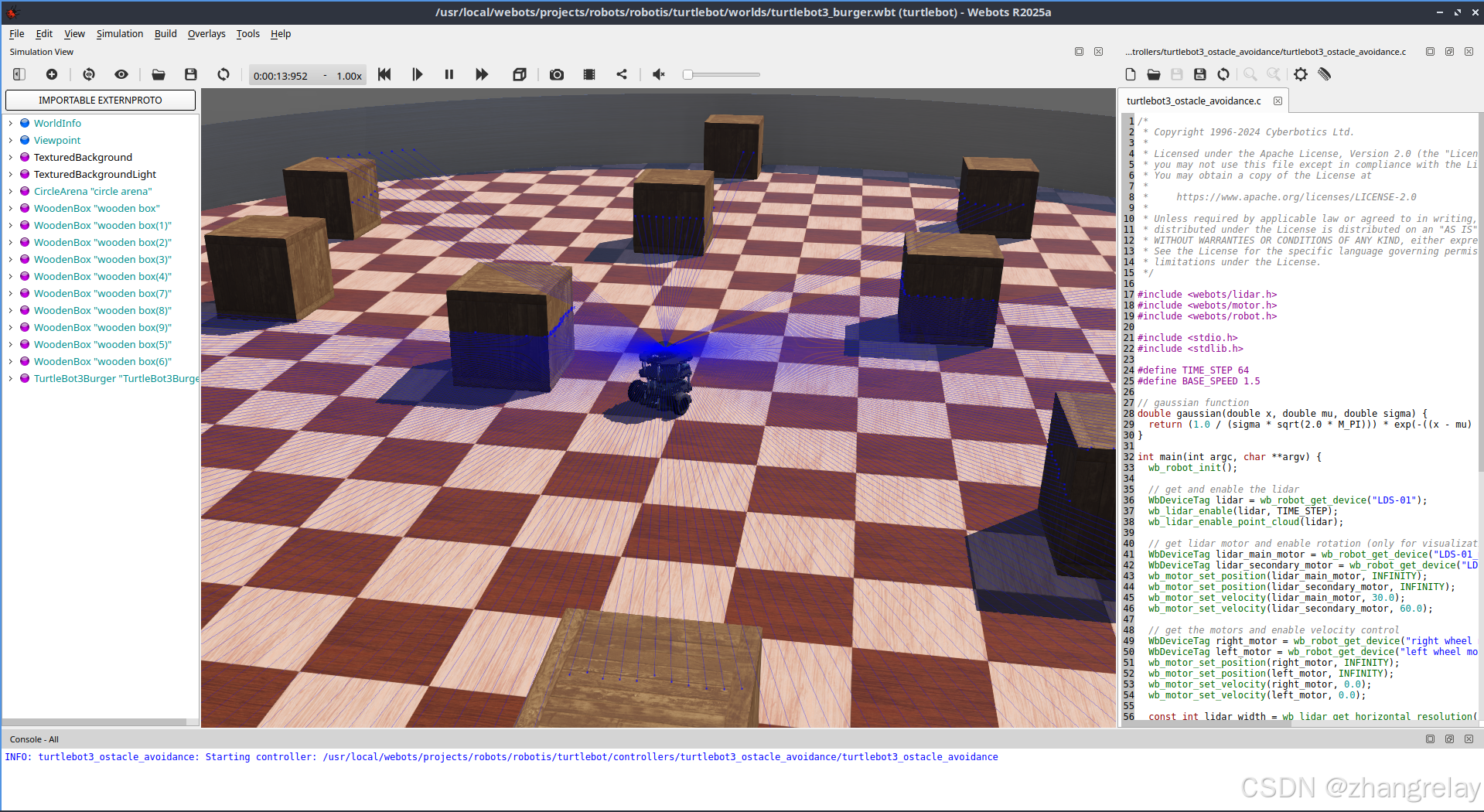
运行:
任选一个案例就可以:
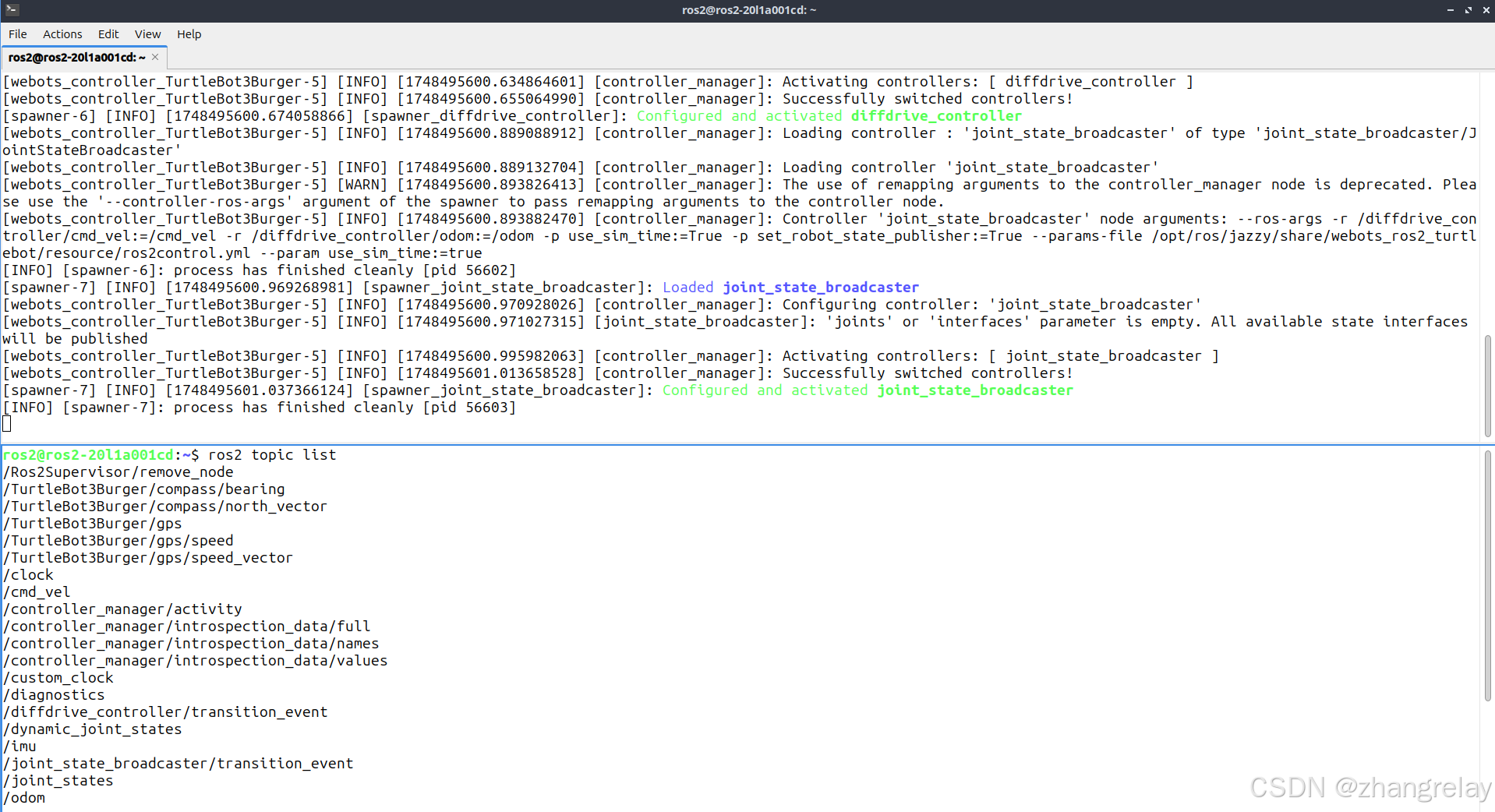
ros2 launch webots_ros2_turtlebot robot_launch.py
ros2 launch webots_ros2_turtlebot robot_launch.py
ros2 launch webots_ros2_turtlebot robot_launch.py这时候会提示需要安装的webots版本,然后再选择对应下载,否则webot-ros2接口和下载webots不匹配,那会浪费一些时间的。
ros2 launch webots_ros2_turtlebot robot_launch.py
[INFO] [launch]: All log files can be found below /home/ros2/.ros/log/2025-05-29-12-48-40-903644-ros2-20l1a001cd-55586
[INFO] [launch]: Default logging verbosity is set to INFO
Webots R2025a was not found in your system.
- If you want to manually install Webots R2025a please download it from https://github.com/cyberbotics/webots/releases/tag/R2025a.
- If you already have Webots R2025a installed please then specify the `WEBOTS_HOME` environment variable.
Do you want Webots R2025a to be automatically installed in /home/ros2/.ros ([Y]es/[N]o)?: n
Missing Webots version R2025a
ros2 launch webots_ros2_turtlebot robot_launch.py
[INFO] [launch]: All log files can be found below /home/ros2/.ros/log/2025-05-29-12-48-40-903644-ros2-20l1a001cd-55586
[INFO] [launch]: Default logging verbosity is set to INFO
Webots R2025a was not found in your system.
- If you want to manually install Webots R2025a please download it from https://github.com/cyberbotics/webots/releases/tag/R2025a.
- If you already have Webots R2025a installed please then specify the `WEBOTS_HOME` environment variable.
Do you want Webots R2025a to be automatically installed in /home/ros2/.ros ([Y]es/[N]o)?: n
Missing Webots version R2025a
uGet下载webots
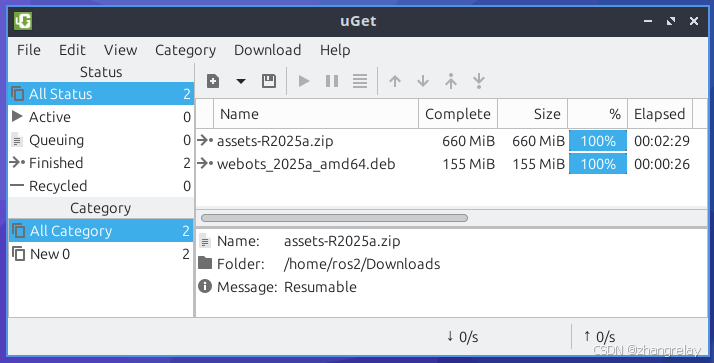
速度还可以的。软件和资源都下载,否则后续加载资源很慢。
安装webots
sudo dpkg -i webots_2025a_amd64.deb
(Reading database ... 527761 files and directories currently installed.)
Preparing to unpack webots_2025a_amd64.deb ...
Unpacking webots (2025a) over (2025a) ...
Setting up webots (2025a) ...
Processing triggers for desktop-file-utils (0.27-2build1) ...
资源需要导入,否则在线加载,非常慢
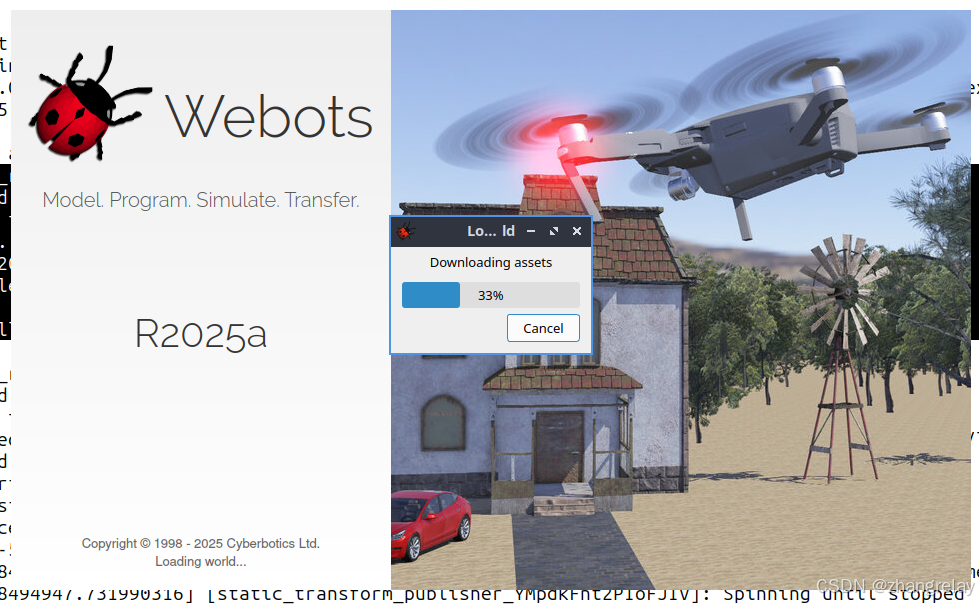
10分钟就下载了这一点点:
离线加载assets
将之前下载的直接导入这里就行。
具体目录如何查看,在本文后面章节,查看一下就ok。
本文介绍了在Ubuntu 24.04系统下安装和使用Webots与ROS2的详细指南。主要内容包括:1. 安装步骤:通过apt命令安装webots-ros2包,需注意版本匹配问题;2. 运行示例:演示如何使用ros2 launch命令启动turtlebot案例;3. Webots R2025a版本特性:介绍该版本的新机器人模型、ROS2支持优化等核心改进;4. 资源管理:详细说明如何离线导入assets资源包以提高加载效率;5. 版本分析:探讨Webots的版本发布策略,包括2025a与历史版本的比较。文章还提供了常见问题的解决方案和相关资源链接。
Webots 2025a 版本发布
发布时间:2025年2月4日
版本代号:R2025a
开发者:Cyberbotics
核心亮点:
- 新增机器人模型
- R2025a版本引入了全新的机器人模型,扩展了Webots的机器人库,支持更多类型的机器人仿真需求。
- 新增演示场景(Demos)
- 提供了更多预设的演示场景,帮助用户快速上手并理解Webots的功能,适用于教学、测试和展示。
- 改进ROS 2支持
- 增强了与ROS 2(Robot Operating System 2)的兼容性和集成度,提升了机器人开发流程的效率,特别是针对需要与ROS 2交互的用户。
- 其他多项改进
- 性能优化:提升了仿真运行效率,减少了资源占用。
- 用户界面改进:优化了界面布局和交互体验,使用户操作更加直观。
- 稳定性提升:修复了已知问题,提高了软件的稳定性和可靠性。
- 文档更新:更新了官方文档,提供了更详细的教程和API参考,方便用户学习和使用。
官方建议:
- 推荐更新:建议用户升级到R2025a版本,以获得最新的功能和改进。
- 查看详细信息:用户可以访问官方公告和完整的变更日志,了解更多关于R2025a版本的详细信息。
下载与支持:
- 下载链接:提供了适用于Windows 10(64位)、Linux(64位,包括Ubuntu 22.04 & 24.04)和macOS的安装包。
- 技术支持:用户可以通过官方论坛、GitHub issue页面或邮件联系开发团队,获取技术支持和反馈问题。
总结
Webots 2025a版本是一次重要的更新,带来了新的机器人模型、演示场景和ROS 2支持的改进,同时对性能、用户界面和稳定性进行了全面优化。官方推荐用户升级到该版本,以提升机器人仿真和开发的效率。用户可以通过官方渠道下载安装包,并参考详细的变更日志了解更多更新内容。
在Webots中导入assets r2025a.zip资源,可通过以下步骤操作:
- 下载资源包:从Webots官方GitHub的release界面下载assets r2025a.zip离线包。
- 定位缓存目录:在文件资源管理器中找到Webots的缓存目录,路径通常为
C:/Users/<USER>/AppData/Local/Cyberbotics/Webots/cache。 - 复制资源文件:将下载的assets r2025a.zip压缩文件内的二进制缓存文件复制到上述缓存目录中。
- 验证导入结果:完成复制后,启动Webots,检查资源是否已成功导入并可正常使用。
在Ubuntu 24.04中导入Webots的assets r2025a.zip资源,可按以下步骤操作:
- 下载资源包:
- 访问Webots的官方GitHub发布页面,找到对应版本的资源包assets r2025a.zip并下载。
- 定位缓存目录:
- 在Ubuntu 24.04中,Webots的缓存目录通常位于用户主目录下的隐藏文件夹中,路径为
~/.local/share/Cyberbotics/Webots/cache。可通过文件资源管理器(如Nautilus)的快捷键Ctrl+H显示隐藏文件和文件夹,或直接在终端中使用cd命令导航到该目录。
- 在Ubuntu 24.04中,Webots的缓存目录通常位于用户主目录下的隐藏文件夹中,路径为
- 复制资源文件:
- 将下载的assets r2025a.zip文件解压(如果它是压缩包形式,但根据描述,这里假设它是可以直接复制的二进制缓存文件或已解压的资源集合)。如果是压缩包,使用
unzip命令解压到指定目录。如果资源已经是解压后的文件,直接复制这些文件到缓存目录中。
- 将下载的assets r2025a.zip文件解压(如果它是压缩包形式,但根据描述,这里假设它是可以直接复制的二进制缓存文件或已解压的资源集合)。如果是压缩包,使用
- 验证导入结果:
- 启动Webots,检查资源是否已成功导入。可以在Webots的界面中浏览可用的模型、场景或其他资源,确认新导入的资源是否在其中。
在Ubuntu系统中,Webots的assets文件(如机器人模型、场景、材质等资源)通常存储在Webots的安装目录或用户特定的缓存目录中。以下是一些可能的位置:
- 安装目录:
- 如果你通过包管理器(如
apt)安装了Webots,assets文件可能位于Webots的安装目录下,具体路径可能因安装方式和版本而异。 - 例如,在某些情况下,assets可能位于
/usr/share/webots或类似的目录中,但这并不是绝对规则,因为Webots的安装结构可能随版本而变化。
- 如果你通过包管理器(如
- 用户缓存目录:
- Webots通常会在用户的主目录下创建一个隐藏的缓存目录,用于存储下载的assets文件、用户自定义的模型和场景等。
- 在Ubuntu上,这个目录通常位于
~/.local/share/Cyberbotics/Webots/下。在这个目录中,你可以找到projects、resources等子目录,其中可能包含assets文件。 - 特别是,如果你下载了如
assets r2025a.zip这样的资源包,并将其解压或复制到了Webots的缓存目录中,那么这些资源就会出现在这里。
- 自定义目录:
- 用户也可以选择将assets文件存储在自定义的目录中,并在Webots中通过文件浏览器或命令行指定这些目录的位置。
如何查找assets文件:
- 使用文件管理器:
- 打开文件管理器,启用“显示隐藏文件”选项(在Nautilus中,可以通过Ctrl+H快捷键实现)。
- 导航到
~/.local/share/Cyberbotics/Webots/目录,查看其中是否包含你需要的assets文件。
- 使用终端:
- 打开终端,使用
cd命令导航到~/.local/share/Cyberbotics/Webots/目录。 - 使用
ls命令列出目录中的文件和子目录,查找assets文件。
- 打开终端,使用
- 检查Webots设置:
- 在Webots中,你可以通过“File”菜单下的“Preferences”或类似选项来检查资源路径的设置,了解Webots当前正在使用哪些目录来存储和查找assets文件。
相关教程早已开发完成,但为何没有发布呢?
重要链接:
001:
https://github.com/cyberbotics/webots/releases
002:
https://docs.ros.org/en/jazzy/Tutorials/Advanced/Simulators/Webots/Installation-Ubuntu.html
总结篇:
- Webots与ROS1、ROS2接口变迁-2024-_webots 2024-优快云博客
- CoppeliaSim(V-Rep)与ROS1、ROS2接口变迁-2024--优快云博客
- Gazebo与ROS1、ROS2接口变迁-2005-2024-_gazebo版本-优快云博客
更多内容,参考之前博客。
不确定性高,学习和研究沉默成本高是核心原因。
2025年已经走出这个阶段了。
Webots在提供的信息中确实没有直接列出2024年的版本,要深入分析为何没有2024版本,我们可以从以下几个方面进行详细探讨:
1. 版本发布策略与节奏
- 发布周期:从提供的资料中可以看出,Webots的版本发布并不遵循严格的年度周期。例如,R2025a在2025年2月发布,而之前的R2023b在2023年6月发布,R2023a在2023年11月发布。这表明Webots的版本发布可能更加灵活,取决于开发进度和重大功能的完成情况。
- 维护版本与主要版本:Webots不仅发布主要版本(如R2025a、R2023b等),还会发布维护版本(如R2020b-rev1、R2020a-rev1等)来修复已知问题和添加小规模改进。这种策略可能导致主要版本的发布不那么频繁。
2. 开发进度与资源分配
- 开发资源:软件的开发需要人力、时间和资金等资源。如果Webots的开发团队在2024年将资源集中在了其他项目上,或者遇到了技术挑战,那么可能会导致2024年没有发布新版本。
- 技术挑战:在软件开发过程中,可能会遇到技术难题或需要重构代码以支持新功能,这些挑战可能导致版本发布延迟。
3. 市场需求与反馈
- 用户需求:Webots的开发团队可能会根据用户反馈和市场需求来决定新版本的发布。如果用户对现有版本的功能和性能满意,且没有迫切的新功能需求,那么开发团队可能会选择继续优化现有版本而不是急于发布新版本。
- 竞争环境:机器人仿真软件市场竞争激烈,Webots的开发团队可能会根据竞争对手的动态来调整自己的发布策略。如果竞争对手在2024年没有发布重大更新,Webots的开发团队可能会选择保持低调,继续积累技术和功能。
4. 版本命名与规划
- 版本命名:从提供的资料中可以看出,Webots的版本命名并不完全遵循年份。例如,R2025a并不意味着它是在2025年发布的唯一版本,而是表示它是该年份的一个主要版本。因此,没有2024版本并不意味着2024年没有发布任何更新。
- 长期规划:Webots的开发团队可能有长期的版本规划,这些规划可能受到多种因素的影响,包括技术趋势、市场需求、开发资源等。因此,2024年没有发布新版本可能是长期规划的一部分。
5. 每日构建与预发布版本
- 每日构建:Webots提供了每日构建版本(Nightly Builds),这些版本可能包含最新的功能和修复,但也可能不稳定。用户可以选择使用这些每日构建版本来体验最新功能,而无需等待正式版本的发布。
- 预发布版本:除了每日构建版本外,Webots还可能发布预发布版本(如Pre-release),这些版本在发布前会经过一定程度的测试,但仍然可能包含未解决的问题。预发布版本的发布也可能影响正式版本的发布时间。
6. 其他可能的因素
- 团队变动:开发团队的变动(如人员离职、新成员加入等)可能影响版本发布的进度。
- 外部环境:如全球经济环境、政策变化等也可能对Webots的版本发布产生影响。
1. Webots R2020b-rev1(维护版本)
- 发布日期:2020年9月2日
- 特点:
- 修复了多个问题,特别是改进了URDF导出功能。
- 加速了物理计算(ODE)。
- 修复了多个错误,包括一些崩溃问题。
- 推荐:建议进行此更新以获得更稳定和优化的体验。
- 下载文件:提供了Windows 10 64-bit、Linux 64-bit(包括Ubuntu 16.04、18.04 & 20.04的多种格式)和macOS的安装包。
2. Webots R2020b(主要版本)
- 发布日期:2020年7月29日
- 特点:
- 添加了新的机器人模型。
- 更好地与ROS2集成。
- 包含了许多新功能。
- 推荐:建议进行此更新以利用新功能和改进。
- 下载文件:提供了Windows 10 64-bit、Linux 64-bit和macOS的安装包。
3. Webots R2020a revision 1(维护版本)
- 发布日期:2020年1月14日
- 特点:
- 修复了多个问题,特别是清理了libcontroller以移除所有外部依赖,以避免可能的冲突。
- 推荐:建议进行此更新以解决已知问题。
- 下载文件:提供了Windows 10 64-bit、Linux Ubuntu 16.04 & 18.04 64-bit和macOS的安装包。
4. Webots R2020a(主要版本)
- 发布日期:2019年12月19日
- 特点:
- 添加了新的机器人模型。
- 修复了与AI和ML应用相关的多个问题。
- 推荐:建议进行此更新以利用新机器人模型和修复的问题。
- 下载文件:提供了Windows 10 64-bit、Linux Ubuntu 16.04 & 18.04 64-bit和macOS的安装包。
5. Webots R2019b revision 1(维护版本)
- 发布日期:2019年10月3日
- 特点:
- 修复了多个问题。
- 添加了许多新资源,包括DJI Mavic 2 PRO无人机。
- 更新了一些依赖项,并添加了新的设备示例。
- 推荐:建议进行此更新以获取新资源和修复的问题。
- 下载文件:提供了Windows 10 64-bit、Linux Ubuntu 16.04 & 18.04 64-bit和macOS的安装包。
6. Webots R2019a revision 1(维护版本)
- 发布日期:2019年2月14日
- 特点:
- 修复了多个问题,包括与某些显卡相关的崩溃问题。
- 推荐:建议进行此更新以解决已知问题,特别是与显卡相关的崩溃问题。
- 备注:此页面未提供该版本的下载文件链接,但提到了它是维护版本并修复了问题。
7. Webots R2019a 及更早版本
- 发布日期:2018年12月18日(对于R2019a)
- 特点:
- Webots R2019a是第一个在Apache 2.0开源许可证下发布的Webots版本。
- 提供了对多个平台的支持。
- 备注:此部分主要介绍了Webots R2019a的开源许可和平台支持,未详细列出更早版本的具体特点,但提到了R2019a作为开源版本的起点。
附加信息
- 对于每个版本,都提供了查看完整变更日志的链接,以便用户了解更多详细信息。
- 页面上可能还包含了用户对版本的反应(如点赞、评论等),虽然这些在文本描述中未具体列出,但通常是GitHub发布页面的一部分。
这个发布页面的第二页继续为用户提供了Webots的历史版本信息,包括维护版本和主要版本,以及每个版本的详细特点和下载链接(对于可下载的版本)。用户可以根据自己的需求选择合适的版本进行下载和安装。
1. Webots Nightly Builds(每日构建版本)
- 描述:这些是Webots的每日构建版本,通常从
master分支构建,可能包含最新的功能和修复,但也可能不稳定。 - 版本示例:
- Webots Nightly Build (28-5-2025)
- Webots Nightly Build (27-5-2025)
- Webots Nightly Build (26-5-2025)
- 特点:
- 每日更新。
- 可能包含最新功能。
- 可能不稳定,建议使用最新官方稳定版本。
2. 官方稳定版本(Official Releases)
- R2025a
- 发布日期:2025年2月4日
- 特点:包含新的机器人模型、新的演示、改进的ROS 2支持等。
- 推荐:建议进行此更新。
- R2023b
- 发布日期:2023年6月28日
- 特点:包含许多改进,如新的机器人、新的设备和新的节点。
- 推荐:建议进行此更新。
- R2023a
- 发布日期:2023年11月28日
- 特点:包含新的机器人、新的资源和全新的Python API。
- 推荐:建议进行此更新。
- R2022b
- 发布日期:2022年9月13日
- 特点:未提供详细更新内容,但列出了该版本。
- R2022a
- 发布日期:2022年12月17日
- 特点:转换为FLU/ENU轴系统,新的皮肤节点,用户界面增强。
- 注意:由于FLU/ENU的变化,可能需要手动更新现有的世界和proto文件。
- 下载文件:提供了Windows、Linux和macOS的安装包。
- R2021b
- 发布日期:2021年7月16日
- 特点:扩展了电机和关节功能,改进了强化学习支持,新的机器人和传感器模型,改进了ROS/ROS2支持,新的网页渲染引擎,并且包大小大幅减少。
- 下载文件:提供了Windows、Linux和macOS的安装包。
- R2021a
- 发布日期:2021年12月15日
- 特点:新的摄像头分割功能,更好的ROS2集成,新的API函数,支持Python 3.9,以及其他改进和错误修复。
- 下载文件:提供了Windows、Linux和macOS的安装包。
3. 下载文件
- 对于每个官方稳定版本,都提供了不同操作系统的下载文件,包括Windows 10 64-bit、Linux 64-bit(包括Ubuntu 18.04和20.04的多种格式)和macOS。
4. 附加信息
- 每个版本都提供了查看官方公告和完整变更日志的链接,以便用户了解更多详细信息。
- 用户反应(Reactions)显示了每个版本发布后用户的反馈数量,虽然这只是一个简单的计数,但可以反映用户对版本的关注程度。
这个发布页面为Webots用户提供了全面的版本信息,包括每日构建版本和官方稳定版本,以及每个版本的详细特点和下载链接。用户可以根据自己的需求选择合适的版本进行下载和安装。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











