




 本文档介绍了如何在Ubuntu18.04上安装ROS Melodic,包括设置软件源、安装过程、初始化rosdep、安装rosinstall、加载环境设置文件以及创建并初始化catkin工作目录,并提供了小海龟测试的步骤。
本文档介绍了如何在Ubuntu18.04上安装ROS Melodic,包括设置软件源、安装过程、初始化rosdep、安装rosinstall、加载环境设置文件以及创建并初始化catkin工作目录,并提供了小海龟测试的步骤。
设置软件源
国外源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'`
国内源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list' #中科大源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list' #清华源
设置最新密钥
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
安装
sudo apt-get update
sudo apt-get install ros-melodic-desktop-full
sudo apt-get install ros-melodic-rqt*
sudo apt install rospack-tools
sudo apt install net-tools
初始化rosdep
sudo rosdep init
rosdep update
安装rosinstall
sudo apt-get install python-rosinstall
加载环境设置文件
source /opt/ros/melodic/setup.bash
创建并初始化工作目录
ROS使用一个名为 catkin 的ROS专用构建系统。为了使用它,用户需要创建并初始化
catkin工作目录,如下所示。除非用户创建新的工作目录,否则此设置只需设置一次。
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
目前,只有src目录和CMakeLists.txt文件在catkin工作目录中,使用catkin_make命令来构建
cd ~/catkin_ws/
catkin_make
设置环境变量
# Set ROS melodic
source /opt/ros/melodic/setup.bash
source ~/catkin_ws/devel/setup.bash
# Set ROS Network
#ifconfig查看电脑ip地址
#打开~/.bashrc添加
export ROS_HOSTNAME=***.***.***.***
export ROS_MASTER_URI=http://${ROS_HOSTNAME}:12338
# Set ROS alias command 快捷指令
alias sdsb="source ./devel/setup.bash"
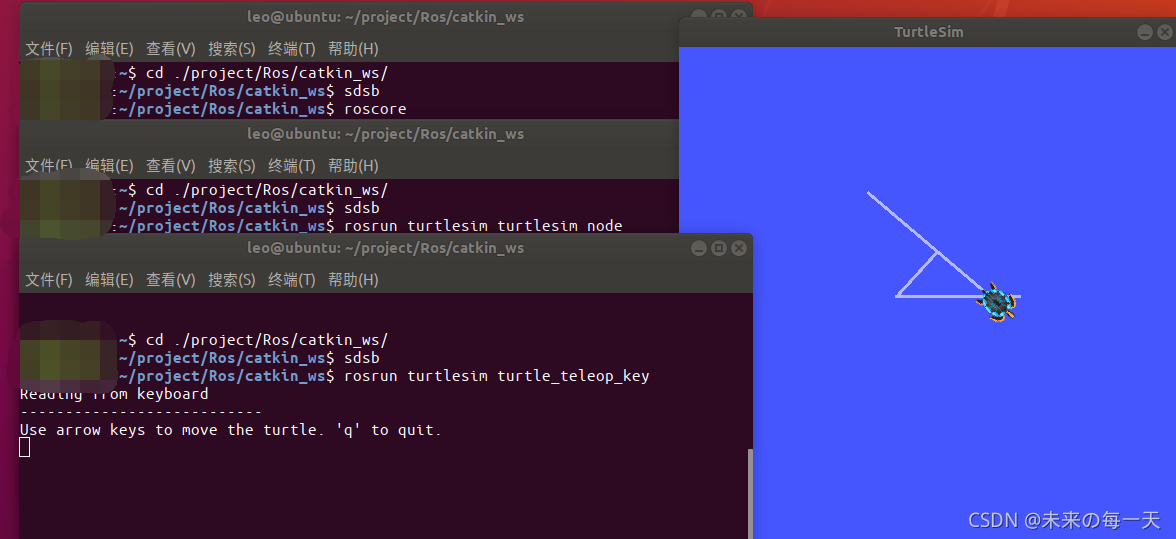
小海龟测试、打开三个终端
分别定位到工作目录
#终端1
sdsb
roscore
#终端2
sdsb
rosrun turtlesim turtlesim_node
#终端3
sdsb
rosrun turtlesim turtle_teleop_key

















 352
352

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









