



一、概述:
散列技术:散列技术是一种通过哈希函数(散列函数)将关键字(Key)映射到存储位置的方法,目的是快速定位数据。其核心思想是将数据的存储位置与关键字建立直接关联,从而实现高效的查找、插入和删除操作。
散列表(哈希表):散列表是一种基于散列技术实现的数据结构,它通过哈希函数将关键字映射到数组的某个位置(槽,Slot),从而实现快速访问。
二、构造方法:
除留取余法:这是最常用的构造方法,对关键字取模,求出余数,让余数作为散列地址
公式:【f(key)=key%p(p<=散列表的长度)】
三、处理冲突的方法:
1、开放地址法:
当发生冲突时,通过某种规则寻找下一个空槽。常见的开放地址法有:
-
线性探测(Linear Probing):
- 公式:
f_i(key) = (f(key) + i) % m(i=1,2,3...) - 示例:
- 散列表长度 m=10,p=7,处理 29 和 15 的冲突:
- 29 初始地址为 1(冲突),探测下一个位置:
(1+1)%10=2(空槽,存入位置 2)。
- 29 初始地址为 1(冲突),探测下一个位置:
- 散列表长度 m=10,p=7,处理 29 和 15 的冲突:
- 问题:容易形成 “聚集”(Cluster),导致后续冲突频繁。
- 公式:
-
二次探测(Quadratic Probing):
- 公式:
f_i(key) = (f(key) + i²) % m(i=1,2,3...) - 示例:
- 冲突时,依次探测位置
f(key)+1², f(key)+2², f(key)+3²...。
- 冲突时,依次探测位置
- 优点:减少线性探测的聚集问题。
- 公式:
-
伪随机探测:
- 公式:
f_i(key) = (f(key) + random(i)) % m(random (i) 为随机数序列)。
- 公式:
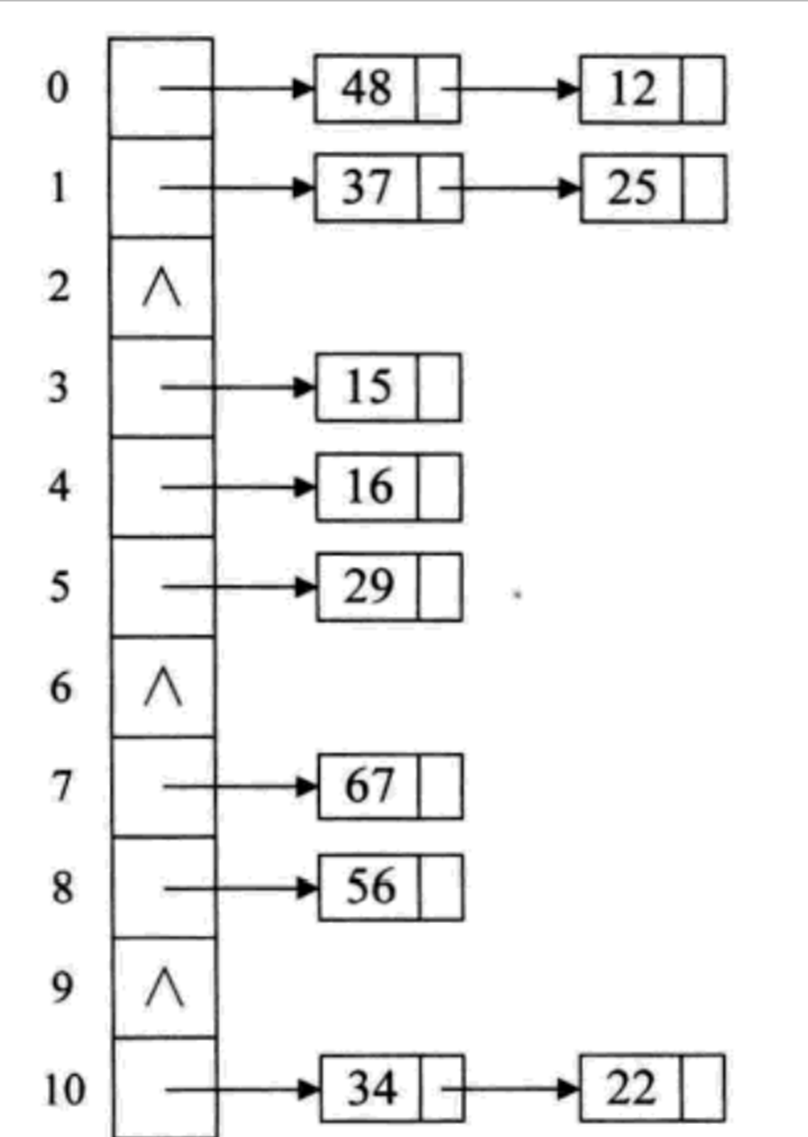
2、链地址法:将所有哈希地址相同的元素存储在同一个链表中。哈希表每个位置对应一个链表头节点,冲突的元素插入到对应链表中。
四、参考代码:
#include<iostream>
#define NULLKEY -32768 // 定义空键标记,用于初始化哈希表,表示该位置未存储数据
using namespace std;
// 哈希函数:使用除留取余法将关键字映射到哈希表位置
// 此处固定使用11作为模数
int Hash(int key){
int add;
add=key%11;
return add;
}
// 插入函数:将关键字插入哈希表
// 参数:h-哈希表指针,key-待插入的关键字
void InsertHash(int* h,int key){
int add=Hash(key); // 计算初始哈希位置
// 线性探测处理冲突:如果当前位置已被占用,则尝试下一个位置
while(h[add]!=NULLKEY){
add=(add+1)%11;
}
h[add]=key; // 找到空位置后插入关键字
}
// 查找函数:在哈希表中查找指定关键字
// 参数:h-哈希表指针,key-待查找的关键字
// 返回值:若找到返回关键字位置,未找到返回-1
int SearchHash(int* h,int key){
int add=Hash(key); // 计算初始哈希位置
int start=add; // 记录初始位置,用于判断是否遍历完整个哈希表
// 线性探测查找:如果当前位置不是目标关键字,则继续查找下一个位置
while(h[add]!=key){
add=(add+1)%11;
// 如果回到初始位置,说明已遍历完整个哈希表,未找到目标关键字,返回-1
if(add==start)
return -1;
}
return add; // 找到目标关键字,返回其位置
}
int main(){
int t;
cin>>t; // 输入测试用例数量
while(t--){
int m,n,i;
int *h;
cin>>m>>n; // m为哈希表大小,n为关键字数量
// 创建哈希表并初始化为NULLKEY
h=new int[m];
for(i=0;i<m;i++){
h[i]=NULLKEY;
}
// 输入n个关键字并插入哈希表
for(i=0;i<n;i++){
int key;
cin>>key;
InsertHash(h,key);
}
// 处理k次查询
int k;
cin>>k;
for(i=0;i<k;i++){
int key;
cin>>key;
cout<<SearchHash(h,key)<<endl;
}
delete[] h;
}
return 0;
}

















 1285
1285

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









