




目录
坐标系类型
右手笛卡尔坐标系,单位基向量为e,|e| = 1。定义以下坐标系:
惯性坐标系I
惯性坐标系I,{OI,eI},可看作绝对坐标系,可作为加速度的评价;
移动坐标系B
移动坐标系B,{OB,eB},车辆轨迹即为移动坐标系的空间曲线,原点OB沿给定轨迹的速度切线移动。也称Frent坐标系。
参考坐标系R
参考坐标系R,{OR,eR}。与移动坐标系B相关,原点OR和第一个单位基向量与移动坐标系一致,即OR = OB,e1R = e1B;第二个单位基向量e2R平行于轨道。
自身坐标系i
与物体固定的坐标系i,{Oi,ei},位于物体质心的坐标系,可看出车辆坐标系。
坐标变换
在车辆工程中,存在三种角度:α侧倾角(绕e1i),β俯仰角(绕e2i),γ横摆角(绕e3i)
itoI
设正旋转阵为,三轴对应的正旋转阵分别为下图:
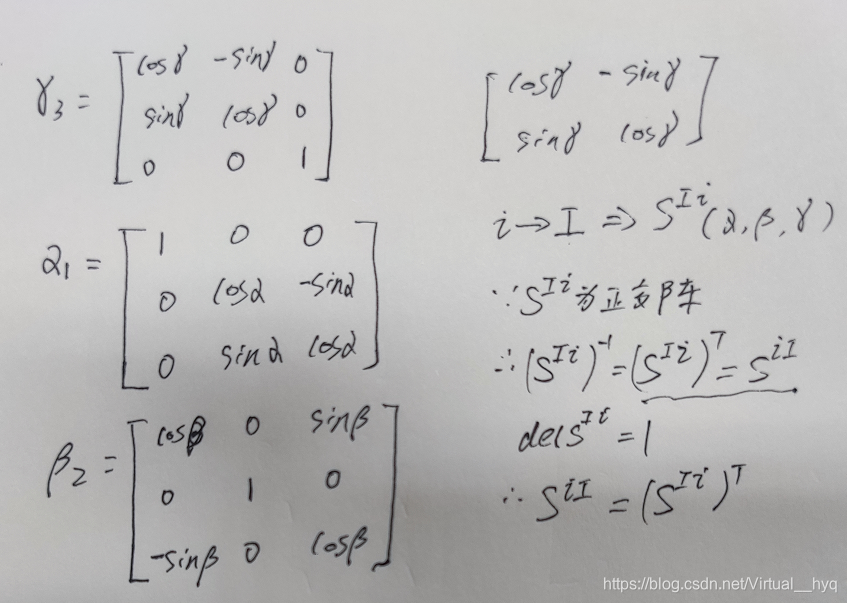
注:二阶可逆矩阵,求逆技巧为:主对调,次换号,除以行列式。
参考文献
1.车辆系统动力学手册 第一卷 基础知识理论和方法

















 1592
1592

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









