




4.1 引言与问题定义

本节推导一种结合物理约束的深度学习框架——物理信息神经网络(Physics-Informed Neural Network, PINN)。该框架不仅拟合观测数据,还将控制断层滑动的物理定律(速率-状态摩擦定律,Rate-and-State Friction, RSF)以及声学监测数据与物理状态之间的本构关系作为正则化项嵌入损失函数,从而在小样本条件下实现高精度的状态预测与参数反演。
4.2 控制方程与物理约束
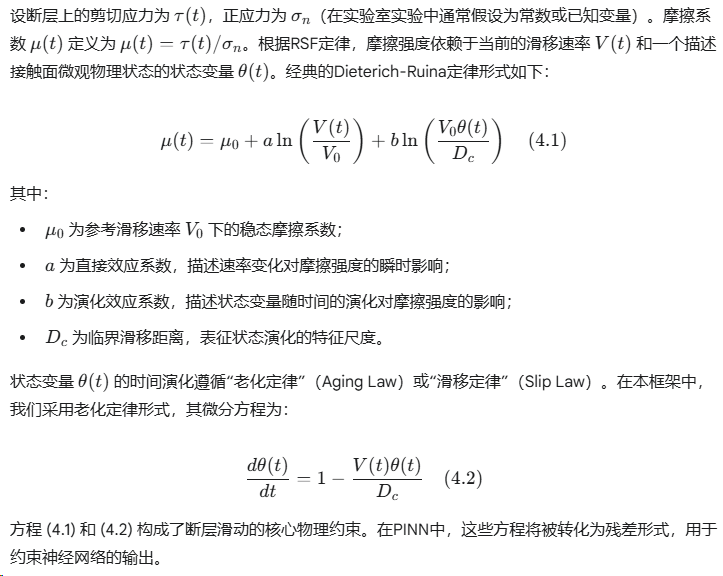
断层的力学行为由速率-状态摩擦定律(RSF)控制,这是描述断层从闭锁到滑动失稳过程的经典本构方程。为了构建PINN的物理残差,我们首先定义控制系统的状态变量与演化方程。
4.2.1 速率-状态摩擦定律(RSF)
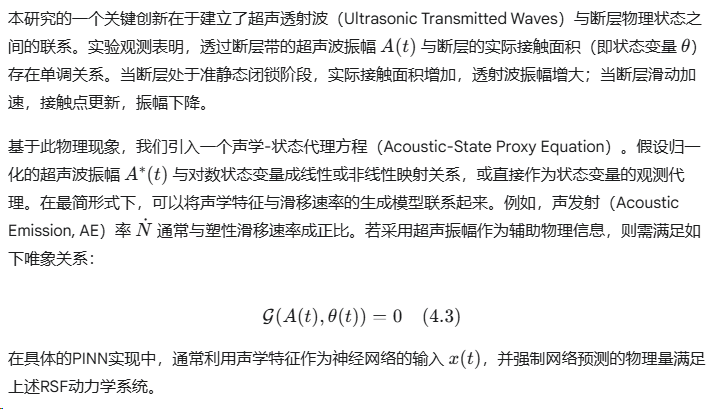
4.2.2 声学监测数据的物理关联
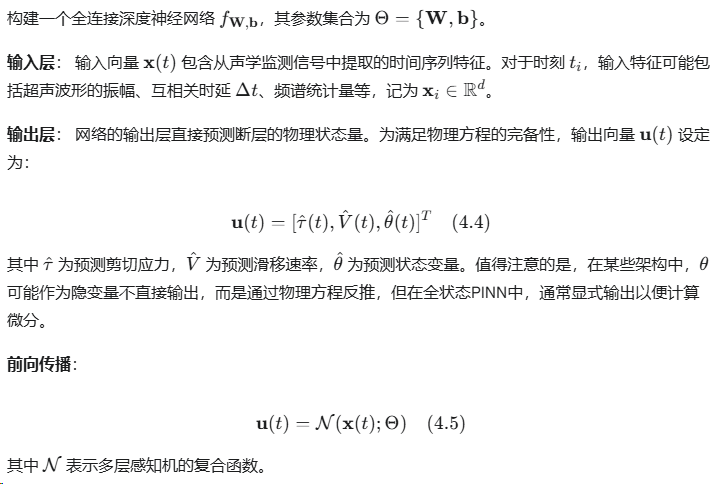
4.3 神经网络架构与前向传播
4.4 损失函数的推导与构建

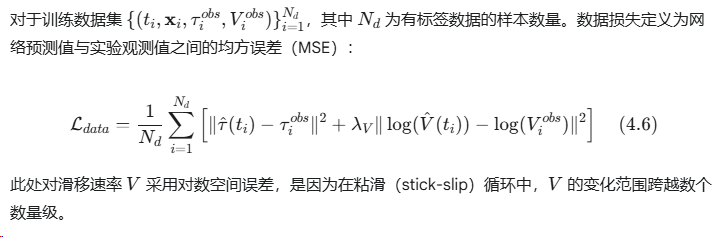
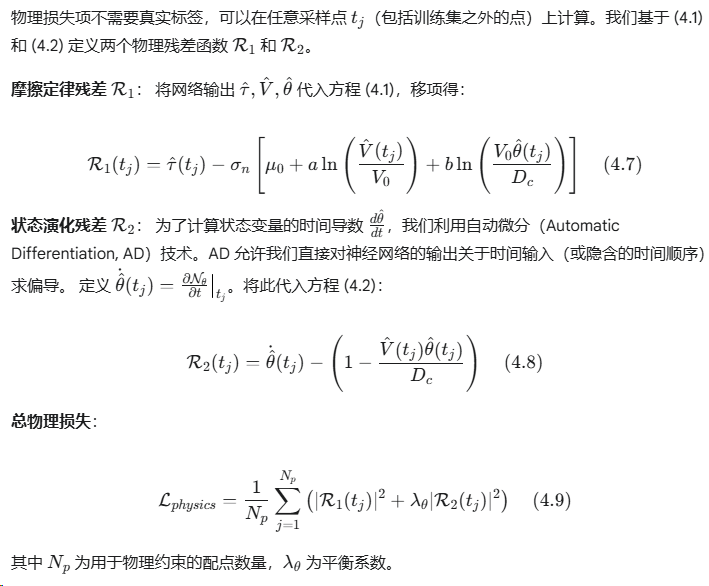
4.4.1 数据驱动损失 ($\mathcal{L}_{data}$)
4.4.2 物理驱动损失 ($\mathcal{L}_{physics}$)
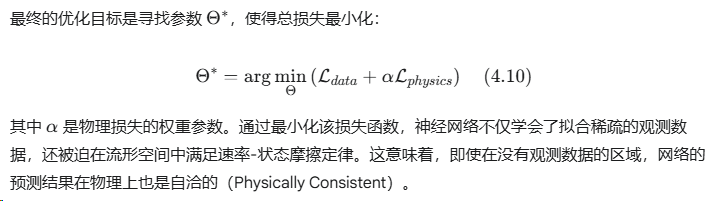
4.4.3 总优化目标
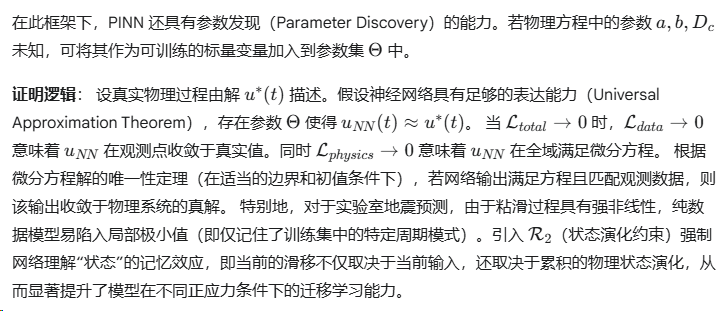
4.5 算法收敛性与参数反演证明
==============================================
全流程 RSF-PINN 求解器设计
6.1 设计思路与工程架构
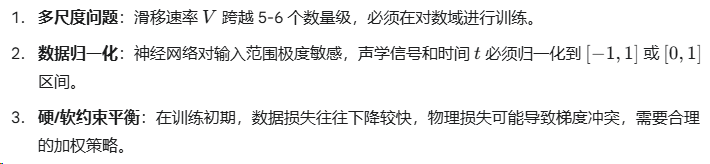
在实际科研中,仅仅定义损失函数是不够的。为了复现 Nature Communications 中的结果,必须解决以下工程挑战:
本代码库包含以下四个核心类:
-
DataNormalizer: 处理物理量纲与无量纲神经网络空间之间的映射。 -
PhysicsInformedNN: 深度残差网络架构(更利于梯度传播)。 -
RSF_PhysicsEngine: 封装物理定律与自动微分逻辑。 -
PINN_Trainer: 集成训练、验证与参数反演的主控流程。
6.2 完整代码实现
import torch
import torch.nn as nn
import torch.optim as optim
import numpy as np
import matplotlib.pyplot as plt
from torch.utils.data import DataLoader, TensorDataset
# 设置随机种子以确保可复现性
torch.manual_seed(42)
np.random.seed(42)
# ==========================================
# 模块 1: 数据归一化与预处理 (Data Handler)
# ============ 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1553
1553

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









