





第3章 超越DDPM:流匹配与一致性模型
目录
3.1.1 随机微分方程(SDE)与常微分方程(ODE)采样
3.1.1.1 概率流ODE(Probability Flow ODE)的确定性采样
3.1.1.2 欧拉方法与高阶求解器(Heun, DPM-Solver)的误差分析
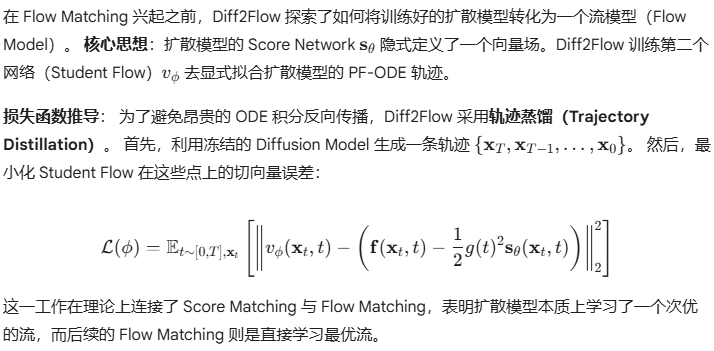
3.1.1.3 Diff2Flow:通过扩散对齐训练流匹配模型
3.2 流匹配(Flow Matching)与整流(Rectified Flow)
3.2.1 为什么SD3和Flux转向了Flow Matching?
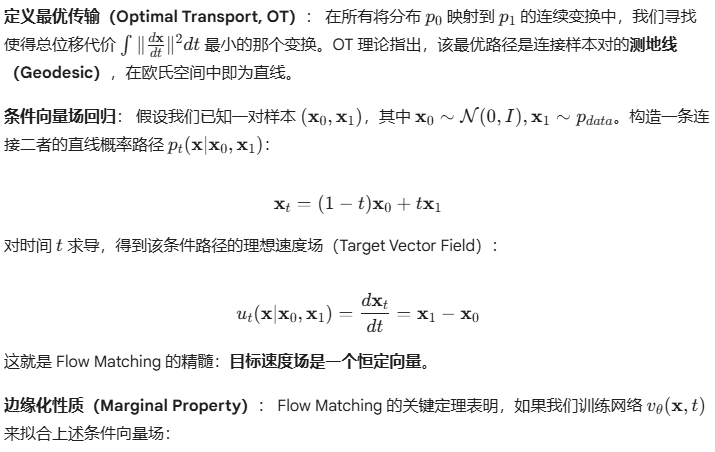
3.2.1.1 这里的“流”:源分布到目标分布的最优传输路径
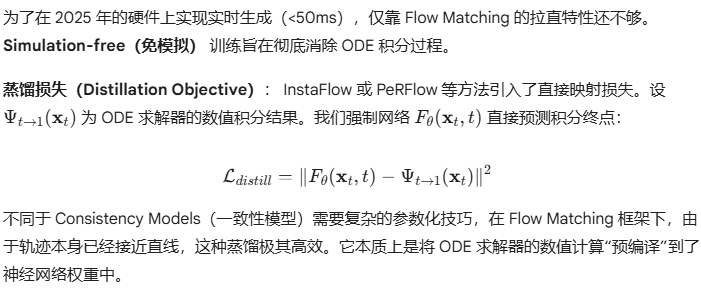
3.2.1.3 2025流匹配加速:模拟-free方法的单步生成
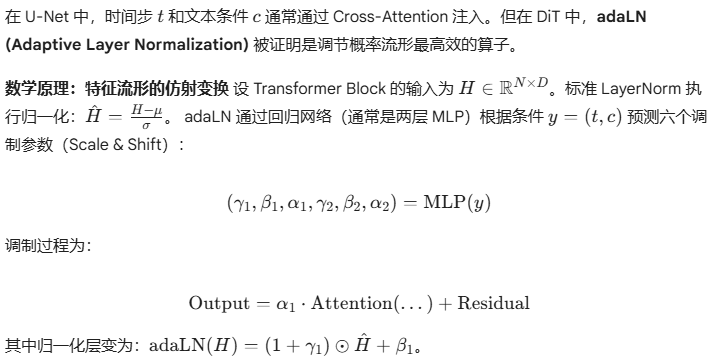
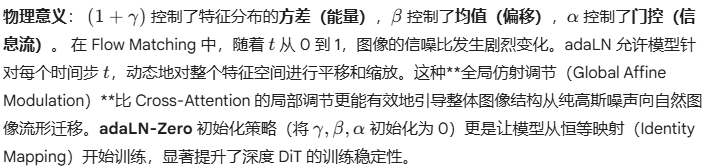
3.2.2.1 DiT 中的 Adaptive Layer Norm (adaLN) 详解
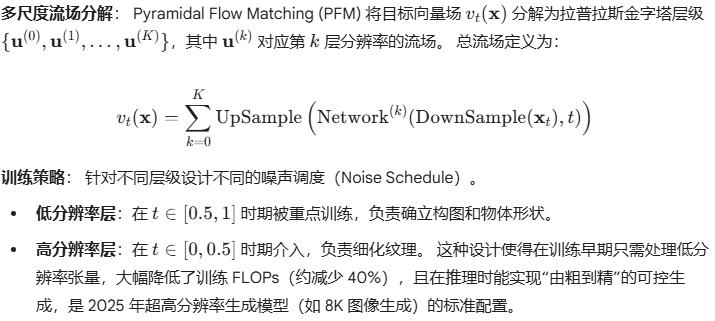
3.2.2.3 Pyramidal Flow Matching:高效的多尺度生成框架
(Chapter 3: Beyond DDPM – Flow Matching and Consistency Models)
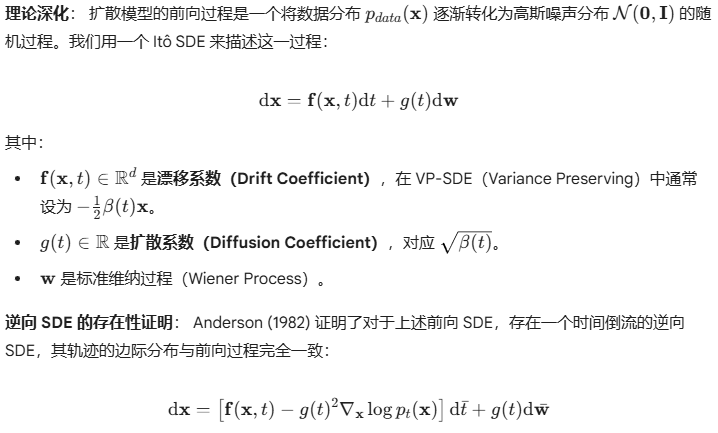
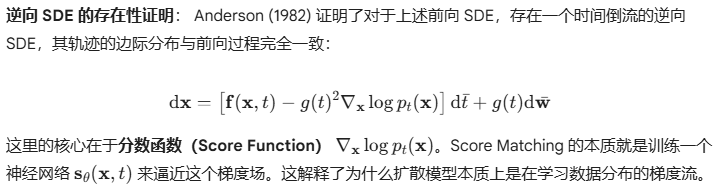
计算机视觉生成领域的范式正经历着一场深刻的数学重构:从基于随机热力学的去噪扩散概率模型(DDPM),全面转向基于确定性最优传输的流匹配(Flow Matching)。这一转变不仅是采样效率的提升,更是生成模型物理视角的根本切换。本章将从随机微分方程(SDE)的统一视角出发,严格推导流形生成的动力学方程,并剖析支撑 SD3 和 Flux 等 SOTA 模型的核心架构。
3.1 扩散模型的数学统一视角
经典的 DDPM 可以被视为 SDE 离散化的一种特殊形式。为了理解如何加速采样(如 DPM-Solver)以及如何实现确定性编辑,我们必须在连续时间域内严格定义扩散过程及其逆过程。
3.1.1 随机微分方程(SDE)与常微分方程(ODE)采样
3.1.1.1 概率流ODE(Probability Flow ODE)的确定性采样


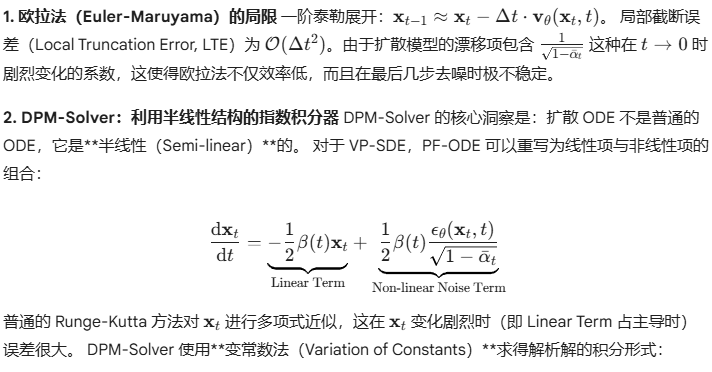
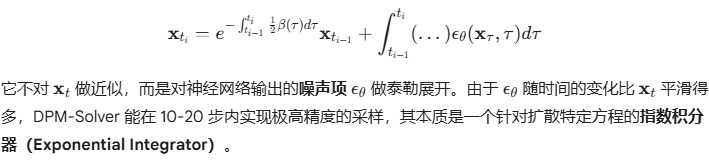
3.1.1.2 欧拉方法与高阶求解器(Heun, DPM-Solver)的误差分析
3.1.1.3 Diff2Flow:通过扩散对齐训练流匹配模型
3.2 流匹配(Flow Matching)与整流(Rectified Flow)
Stable Diffusion 3 和 Flux 的发布,标志着**条件流匹配(Conditional Flow Matching, CFM)**正式取代 DDPM 成为新一代生成模型的主流范式。
3.2.1 为什么SD3和Flux转向了Flow Matching?
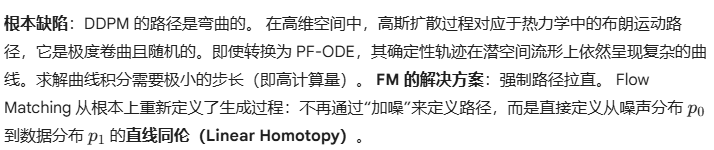
3.2.1.1 这里的“流”:源分布到目标分布的最优传输路径

3.2.1.2 线性插值与一步生成的理论可能性
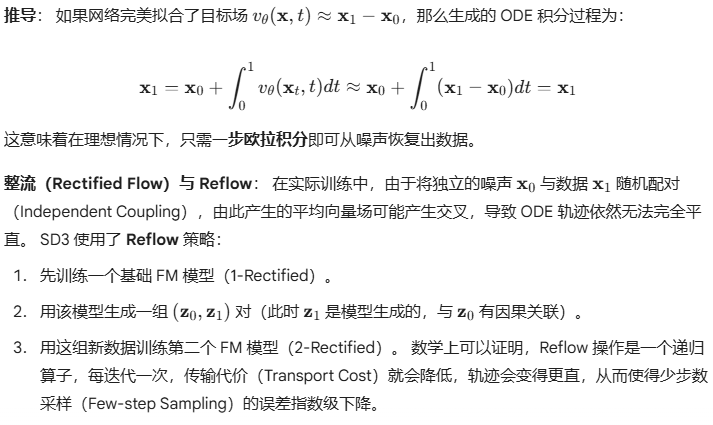
3.2.1.3 2025流匹配加速:模拟-free方法的单步生成
3.2.2 文本到图像(T2I)的最新架构
架构是算法的容器。SD3 和 Flux 抛弃了 U-Net,全面拥抱 DiT (Diffusion Transformer),并针对流匹配的特性进行了两项关键的数学化改进。
3.2.2.1 DiT 中的 Adaptive Layer Norm (adaLN) 详解
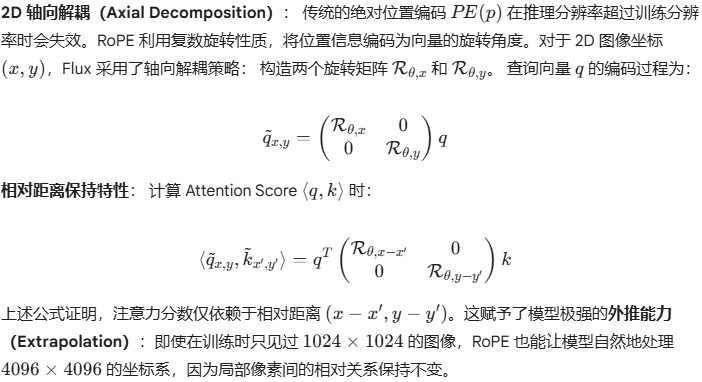
3.2.2.2 旋转位置编码(RoPE)在2D生成中的适配
3.2.2.3 Pyramidal Flow Matching:高效的多尺度生成框架
传统的 Flow Matching 假设所有频率的特征都以相同的速度从噪声演变为数据。这不仅计算浪费,也不符合视觉感知的物理规律(低频结构先形成,高频纹理后填充)。

















 4万+
4万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









