 Sim-to-Real迁移策略综述
Sim-to-Real迁移策略综述




11.1 域随机化与对抗扰动设计
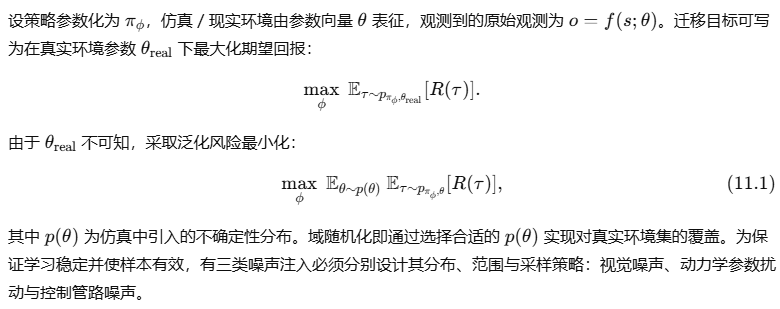
域随机化与对抗扰动的目标在于通过构造仿真域内的多样性和极端情形,使学习到的策略在现实中保持鲁棒性。理论上可将迁移问题表述为对参数不确定集和观测变换下性能的最小化风险问题,并通过随机化采样与最坏情形优化(min–max)两类方法分别降低偏差与提升极端稳健性。以下首先给出形式化的优化目标,然后逐项推导视觉、动力学与控制噪声注入的设计要点,最后推导对抗场景生成的数学框架与试验床构建准则。
11.1.1 视觉、动力学与控制噪声注入要点
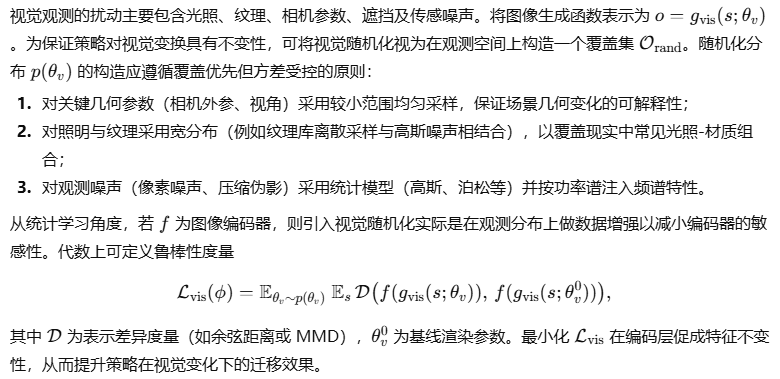
(一)视觉噪声的设计
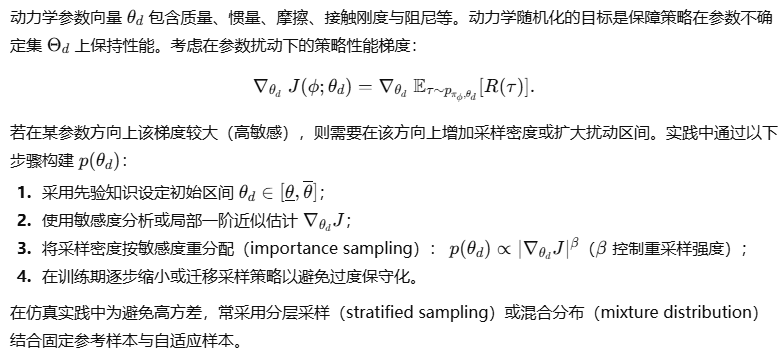
(二)动力学参数扰动的设计
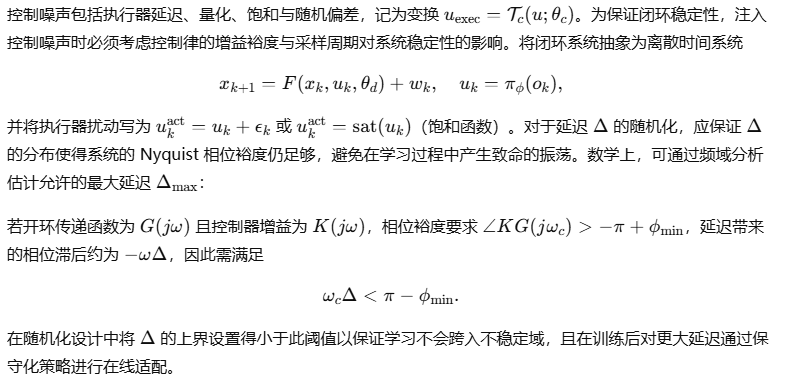
(三)控制噪声与执行管路不确定性的建模
11.1.2 对抗场景生成与鲁棒性试验床
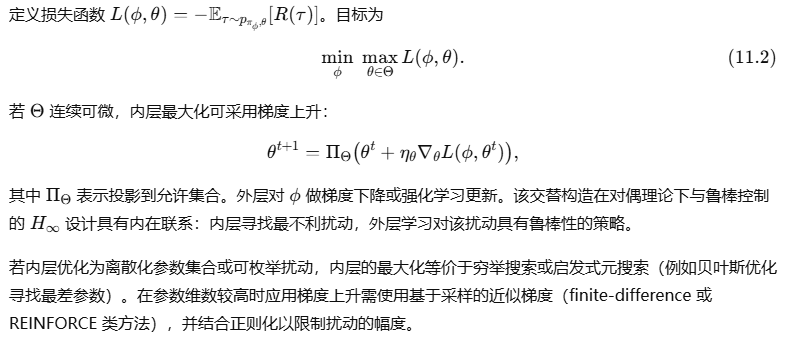
域随机化覆盖的是“典型”变化,而对抗扰动寻求识别并强化“最差情况”。对抗场景生成以 min–max 形式刻画:对给定策略 πϕ\pi_\phiπϕ,寻找参数 θ\thetaθ 使得损失(或负回报)最大化;对抗训练即交替求解该 min–max 问题。
(一)min–max 优化框架的推导
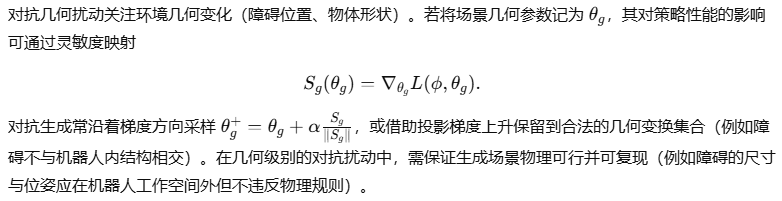
(二)对抗几何与场景扰动的构造
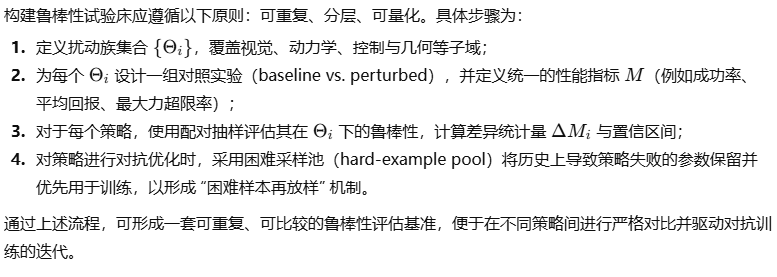
(三)鲁棒性试验床的组织原则
11.1.3 迁移损失、分布对齐与特征不变性
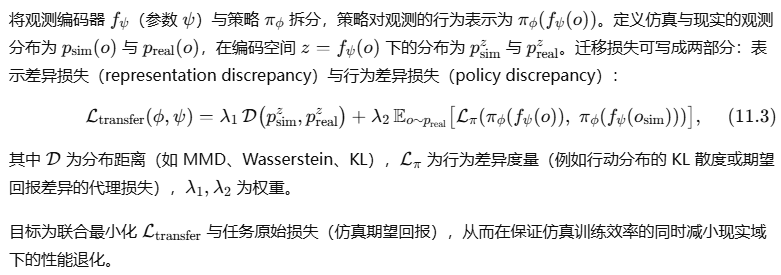
策略从仿真域迁移到现实域的性能差异可以被量化为在特征或行为分布上的偏移。系统化迁移需要定义明确的迁移损失、设计分布对齐方法并构造特征不变性约束,使得在仿真训练的表示空间中现实观测映射到相似的编码分布,从而保证策略输出的一致性。以下首先形式化迁移损失并给出分布距离的选择与性质,然后推导若干对齐算法(对抗对齐、最小均方差、Wasserstein 最小化)及其理论性保证,最后讨论在强化学习体系下的实用实现细节与收敛性考虑。
11.1.3.1 迁移损失的数学表述
11.2.2 分布对齐方法与理论推导
分布对齐方法可分为三大类:统计距离最小化(MMD 等核方法)、对抗式对齐(GAN 风格)、以及基于运输代价的 Wasserstein 对齐。下面分别给出它们的形式化推导与适用性分析。
(一)核两样本检验与 MMD 对齐
(二)对抗式分布对齐(Adversarial Alignment)
(三)Wasserstein 对齐与最优传输视角
11.2.3 特征不变性与任务相关保持
对齐编码分布并不必然保证策略输出的不变性。应在编码训练中同时保持任务相关性,使编码既能去除域特有噪声,又保留对控制决策有判别性的信息。构造联合损失:
11.2.4 强化学习下的实现细节与收敛性
在强化学习体系中,通常采用异步或交替优化:在仿真中进行策略更新的同时收集现实数据用于对齐正则项或监督。为保证训练稳定与样本效率,实践中建议:
-
采用小步长的对齐正则化逐步引入,避免在训练早期破坏策略收敛性;
-
使用经验回放混合仿真与现实样本(比例调度)以稳定近似梯度;
-
对抗训练中对判别器采用梯度惩罚与谱归一化以保证训练稳定;
-
在对齐时保留任务相关的最小足够统计量(sufficient statistics),通过信息瓶颈正则或判别器辅助任务保留机制实现。
理论上,若对齐损失与任务损失均为凸并满足 Lipschitz 条件,则交替最小化具有局部收敛性保证。强化学习中由于非凸性与采样噪声,收敛性为局部性质,需借助经验验证与小样本微调校验最终迁移性能。
小结
本章建立了 Sim-to-Real 的系统化设计方法论:通过域随机化覆盖典型域差异、通过对抗扰动增强极端鲁棒性、并通过分布对齐与编码器正则构造特征不变性以降低迁移损失。在视觉、动力学与控制随机化时应基于敏感度分析与稳定性约束选择扰动分布;对抗生成则以 min–max 优化形式刻画最差场景并通过困难样本重采样驱动训练。分布对齐可采用 MMD、对抗对齐或 Wasserstein 最小化等方法,结合任务保留项以保持动作可判别性。理论推导与工程实现共同指向:在保证学习效率的前提下,通过有控制的随机化与对齐策略,系统性地降低仿真与现实的域差距,提升策略的可靠迁移性能。
11.2 在线校正与闭环自适应方法
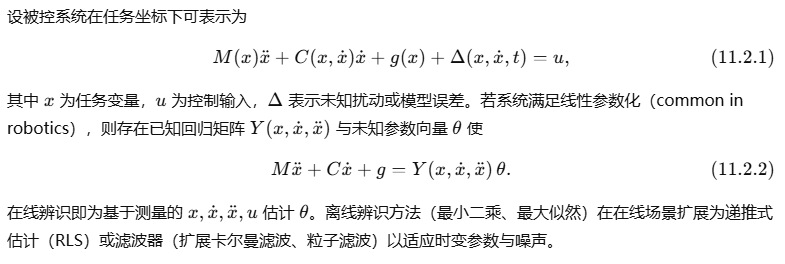
在线校正与闭环自适应的目标在于在部署阶段以最小的真实数据代价修正仿真偏差或策略失配,保证控制器在面对模型误差、参数漂移或未建模扰动时仍能保持性能与安全性。在线校正包含两个相互耦合的子问题:一是在线系统辨识与参数自适配,用于实时估计环境或机器人动力学参数并将估计用于控制或仿真参数更新;二是在线微调策略与安全回退机制,用于在保证安全约束下对策略做渐进改进或回滚。下文从数学模型、辨识算法、收敛性条件、控制融合与安全保证出发,按步骤推导可实施的在线自适应框架并给出工程实现要点与验证方法。
11.2.1 在线系统辨识与参数自适配策略
一、问题形式化与线性参数化假设
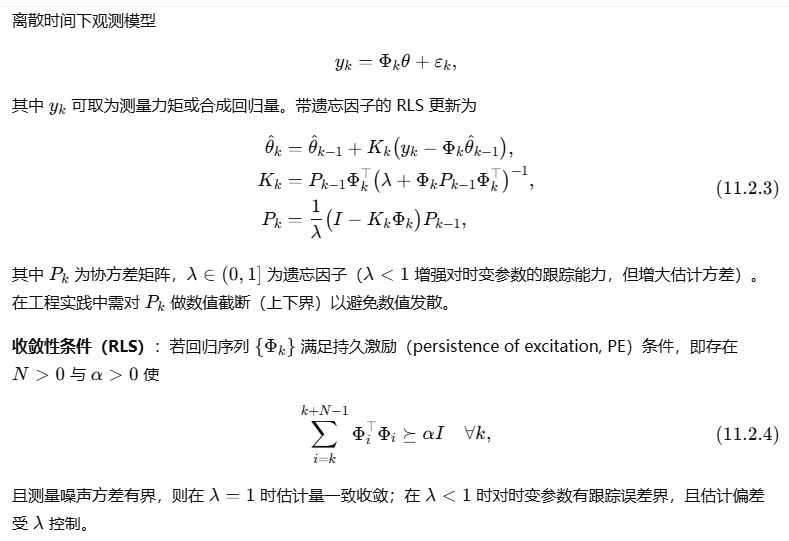
二、递推最小二乘(RLS)与遗忘因子
三、扩展卡尔曼滤波(EKF)与联合状态-参数估计

四、基于 Lyapunov 的自适应控制:Slotine–Li 框架

五、参数投影与约束更新

六、实际工程要点
-
激励设计:在线辨识需要在不破坏任务的前提下引入富激励(例如小幅探测性微动、调制控制参考轨迹),满足 PE 条件以保证参数收敛。
-
数值稳定:对 RLS 的 PPP 做上界/下界截断,使用单步正则化或退火因子避免协方差发散。
-
延迟与采样:考虑传感延迟与滤波器相位,采用预测补偿或在估计器中显式建模时间滞后。
-
混合估计:对高维或非线性参数采用 EKF/UKF,关键刚性参数用 RLS 联合估计以兼顾精度与效率。
-
验证环节:基于持久激励窗口计算 Fisher information 矩阵与估计方差,若信息不足则触发安全微动以获得更多数据。
11.2.2 在线微调、安全回退与实时验证机制
一、在线微调的目标与方法
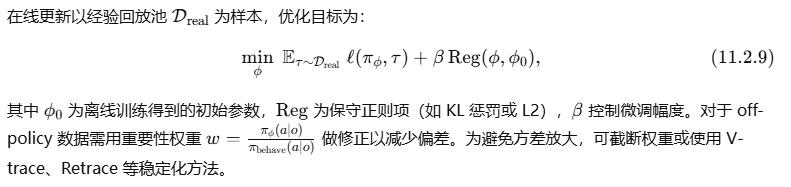
在线微调(online fine-tuning)指在现实交互中以小批量真实数据对策略参数(或感知编码器)做增量优化,提升在真实环境下的性能。常见技术包括行为克隆微调、策略梯度少样本更新、以及基于元学习的快速适应(MAML)。在线微调必须在保证安全的前提下执行,通常采用保守更新策略与安全投影。
(一)增量优化与重要性重加权
(二)元学习与快速适应

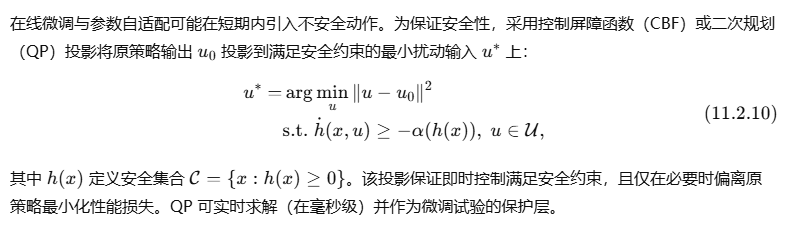
二、安全回退(Safe Fallback)与控制投影
三、实时验证与概念漂移检测
在线运行中需实时监测策略性能与环境分布变化,常用方法包括:
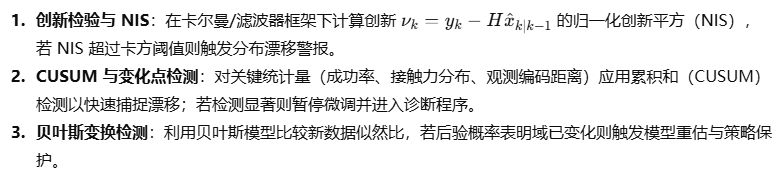
实时验证逻辑设定多级阈值以权衡误报与漏报。发生漂移时采取分层响应:轻微漂移触发保守增益调节与小量微调;显著漂移触发回退到上一个受验证的策略快照并进入离线诊断。
四、回滚与快照策略
为保证可追溯与快速恢复,所有在线更新应在受控事务中进行:在微调前创建策略快照并记录元数据(版本、采样种子、现场日志)。若实时验证检测到性能下降超阈,则自动回滚到最近的稳定快照并记录触发条件以供离线分析。快照策略需满足原子性:更新要么完全生效,要么完全回滚,避免半结构配置导致的不一致性。
五、在线微调的算法伪码
初始化: π ← π_0, snapshot ← save(π)
for each episode do
collect trajectory τ_real
append τ_real to D_real
if detect_drift(D_real) then
restore(snapshot); trigger offline_diagnosis()
continue
end
if ready_for_finetune(D_real) then
compute gradient g on small minibatch from D_real
apply constrained update: φ_new = argmin ||φ-φ_old||^2 + α g^T(φ-φ_old) s.t. safety_QP
if validate(φ_new) then
snapshot ← save(φ_new)
π ← π_new
else
restore(snapshot)
end
end
end
验证函数 validate 包括短期仿真回放、保守在线试探以及监测短窗内安全事件率。安全 QP 在更新后即时应用于动作输出作为最后保障。
六、工程实践要点
-
计算与延迟约束:在线估计与 QP 求解需在控制周期内完成,选择轻量级估计算法并在必要时将复杂估计下放至背景线程。
-
样本效率与稳定性:使用经验回放、重要性截断与小步长更新避免对策略造成剧烈变动。
-
审计与可追溯:记录每次在线更新的触发条件、数据样本、验证结果与快照以便事后分析。
-
分级权限:对完全自动化更新设置等级限制,关键任务场景应采用半自动或人工批准机制。
小结
在线校正与闭环自适应结合辨识、参数自适配、微调与安全投影,形成一套面向真实部署的迁移闭环。数学基础包括 RLS/EKF 的统计收敛性、Slotine–Li 自适应控制的 Lyapunov 稳定证明与 PE 条件下的参数一致性;工程实施须兼顾实时性、数值稳定与安全保护,采用参数投影、控制屏障函数与回滚快照来保证安全性与可追溯性。实时验证与漂移检测机制提供在线自适应触发与保护逻辑,从而在有限真实交互预算下实现稳健的 Sim-to-Real 自适应迁移。
11.3 迁移失败诊断与恢复流程
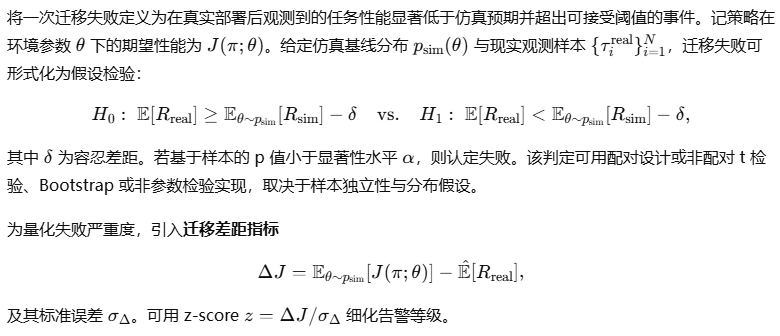
迁移失败诊断与恢复流程旨在构建从故障检测、根因定位到安全恢复与增量修复的一体化闭环。该流程要求日志与度量具有可追溯性、检测方法具有统计保证、恢复机制具备原子性与可回滚性、修复策略兼顾安全与收敛性。下文首先定义失败事件与度量框架,随后给出根因分析模板与必要日志字段,接着系统推导自动化探测算法(包含统计检验与变化点检测),最后描述回滚与增量修复的工程化实现与数学验证手段,并提供可直接实施的伪码与流程图式规范。
11.3.1 失败根因分析模板与日志要点
一、失败事件的形式化与度量
二、日志与元数据标准(必须字段)
成功的根因分析依赖于统一且详尽的日志 schema,建议每条相关试验/轨迹记录至少包含下列字段(机器可读 JSON):
-
experiment_id:唯一标识符(UUID)。 -
policy_version:策略模型版本(哈希)。 -
sim_baseline:基线仿真版本(MAJOR.MINOR.PATCH+ commit)。 -
scene_id、scene_version:实际运行场景标识与版本。 -
timestamp_utc:统一时间戳(UTC,ISO8601)。 -
seed:若仿真迁移包含可复现部分,应记录随机种子。 -
observations:按时间序列记录的原始观测(视觉、触觉、力等)或其摘要引用。 -
actions:策略输出序列(时间对齐)。 -
rewards:即时或累计回报序列。 -
safety_events:安全阈值违约事件列表(时间、量值、类型)。 -
hardware_state:传感器/执行器健康状态(温度、电压、通信丢包率)。 -
deploy_config:运行时控制增益、滤波参数、延迟补偿等配置信息。 -
notes:人审注释(若有)。 -
provenance:指向仿真快照、训练数据包与版本控制的哈希引用。
日志应保证不可变性(append-only),并提供快速检索索引(按 experiment_id、policy_version、scene_id、时间窗)。
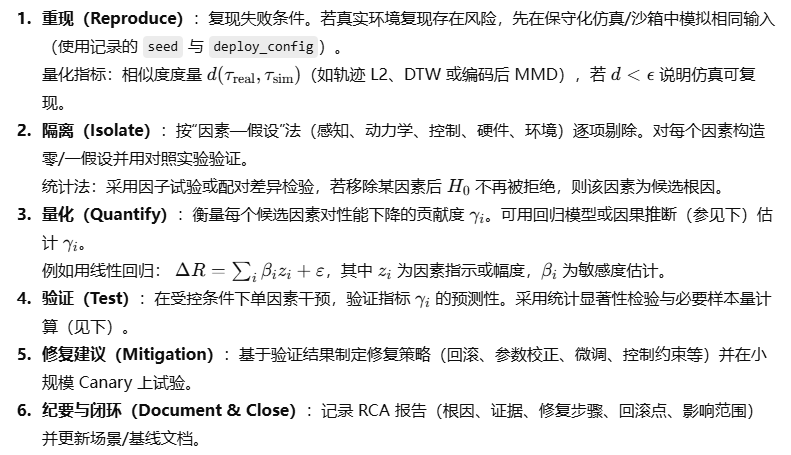
三、根因分析(RCA)模板与度量化流程
根因分析采用结构化流程并量化关键判断以降低人为偏差。模板步骤如下:
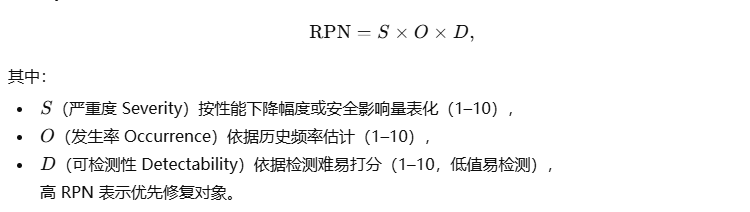
四、优先级量表与 FMEA 扩展
采用 FMEA(Failure Modes and Effects Analysis)方法对发现的故障类型做量化优先级(RPN,Risk Priority Number):
11.3.2 自动探测、回滚与增量修复实践
一、自动化故障检测:算法与阈值设定
自动检测系统从流式指标中判断性能退化或异常。关键技术包括变化点检测(change point detection)、序列异常检测与多指标联合判决。
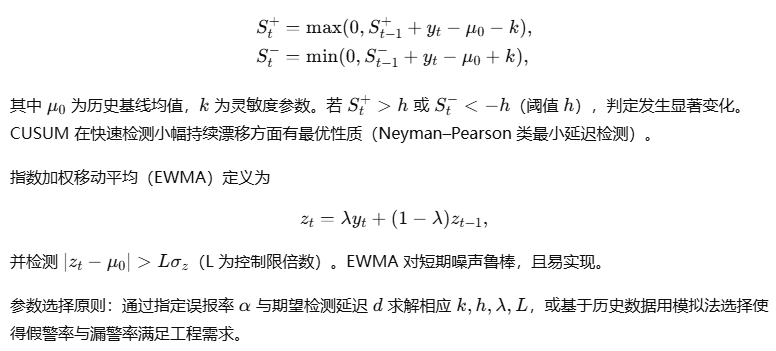
(一)CUSUM 与 EWMA 的变化点检测
对序列 yty_tyt(如每 episode 回报或短窗成功率)使用累积和(CUSUM)检测上升/下降趋势。定义双向 CUSUM 统计:
(二)多维度联合检验与奇异值分解(SVD)异常检测

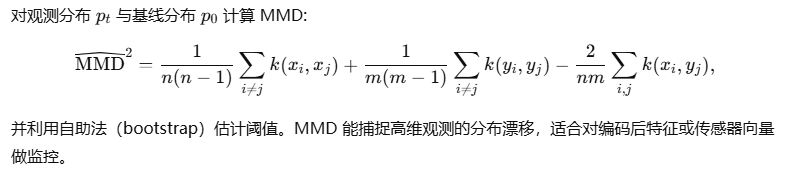
(三)基于分布距离的漂移检测(MMD / Wasserstein)
二、自动回滚策略与安全隔离
回滚策略要求原子性、最小中断与可追溯的恢复步骤。工程化实现通常采用 Canary / Blue–Green 模式与分阶段回滚。
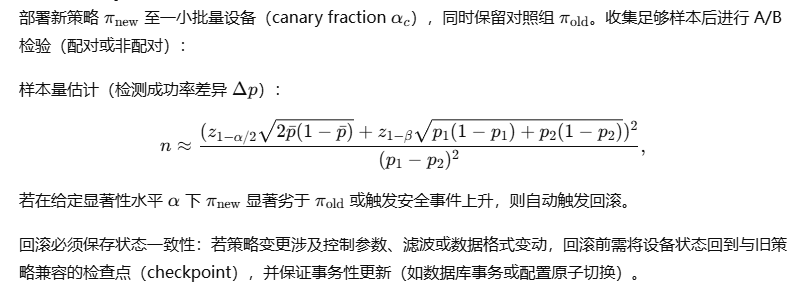
(一)Canary 发布与自动回滚判据
(二)蓝绿部署(Blue–Green)与分段回滚
蓝绿部署维护两个全量环境(blue/green),切换流量时先将少量流量导向 green 并观测指标;若失败则直接回到 blue。分段回滚允许按设备组或场景回滚,减少总体中断。回滚决策应记录触发证据与回滚时间点以便后续 RCA。
三、增量修复策略与数学验证
增量修复指在回滚之外,通过最小改动逐步修正导致失败的原因,目标是快速恢复性能同时保持安全。
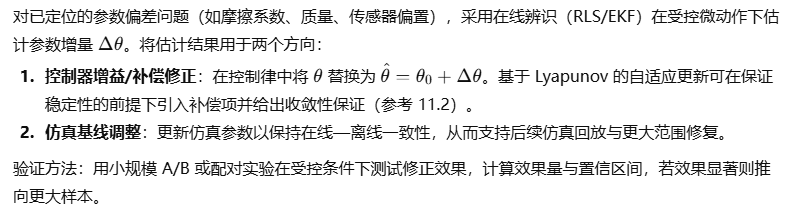
(一)参数再识别与增量校正
(二)安全约束下的策略微调(Constrained Fine-tuning)
(三)困难样本回放与对抗重训练
四、自动化流程伪码
monitor_loop():
while running:
collect metrics batch M
if detect_change(M): # CUSUM/EWMA/MMD
alert RCA_pipeline with recent logs
snapshot ← latest_stable_snapshot()
run_canary(snapshot) # 小规模回放/仿真验证
if canary_fails:
rollback_to(snapshot) # Canary 回滚(atomic)
start_incremental_repair(M)
else:
if auto_repair_enabled:
delta = diagnose_and_estimate(M) # RLS/EKF/GLM 估计偏差
apply_patch(delta) with safety_QP
validate_patch()
if validate_success:
promote_patch()
else:
rollback_to(snapshot)
sleep(interval)
五、可视化与审计记录
每次检测—回滚—修复事件应生成审计条目,包括触发阈值、检测统计量、回滚时刻、修复动作与验证结果。为便于后续学习与工程改进,应将困难样本、RCA 报告与修复脚本纳入版本控制并与场景/快照建立血缘关系。
小结
迁移失败诊断与恢复流程以严谨的统计判定、结构化的根因分析、自动化的检测机制与原子化的回滚/修复操作为核心。理论工具包括假设检验、累积和检测(CUSUM)、分布距离 MMD/Wasserstein、多元残差分析(SVD)、因果回归与 FMEA 风险量表;工程手段涵盖日志 schema 设计、Canary/Blue–Green 部署、检查点事务性回滚、在线辨识与受约束微调、困难样本回放与对抗重训练。该流程在保证安全性的同时通过增量化修复最小化业务中断,并通过可追溯审计为长期仿真—现实一致性改进建立闭环证据链。

















 982
982

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









