




 本文详细介绍了在Ubuntu系统中安装和配置ROS(机器人操作系统)的步骤,包括选择合适的ROS版本、配置软件源、安装ROS软件包、设置环境变量、安装依赖以及测试ROS安装是否成功。
本文详细介绍了在Ubuntu系统中安装和配置ROS(机器人操作系统)的步骤,包括选择合适的ROS版本、配置软件源、安装ROS软件包、设置环境变量、安装依赖以及测试ROS安装是否成功。
结合自己多次在Ubuntu下安装、配置ros:
重要:一定要挂代理、挂代理、挂代理。
首先,需要知道:ROS版本和Ubuntu 版本之间存在对应关系:
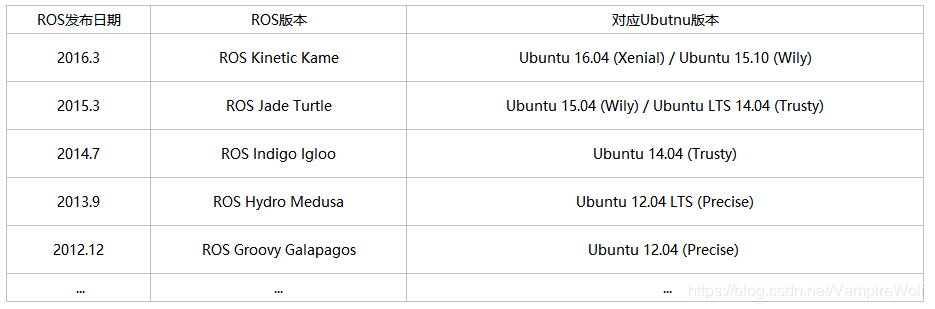
所以ROS需要选择适合自己的版本。
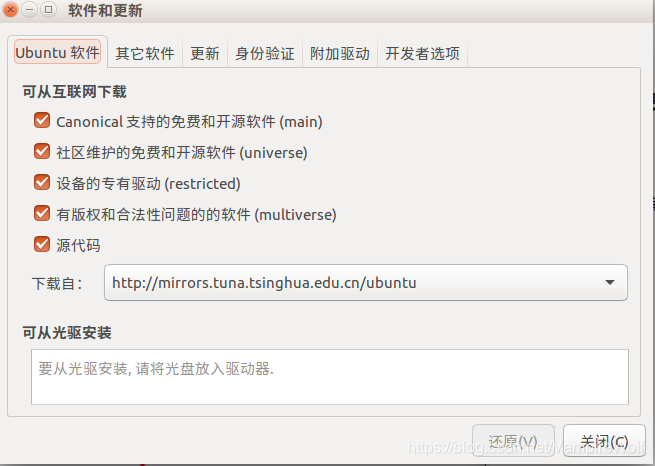
1.配置Ubuntu的资源库:“restricted”,“universe"和"multiverse”。
打开系统设置,在系统栏找到软件和更新,打开,如下图所示:

并按照下图所示勾选资源库,并在” Download from:"一栏选择http://mirrors.tuna.tsinghua.edu.cn/ubuntu的下载源。
2.设置Ubuntu的安装源(配置sources.list, 使得计算机能够从packages.ros.org接收软件):
打开一个终端(Ctrl+Alt+T),并输入:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
3.增加key
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
4.更新(重新定向ROS服务器,避免错误的库版本或软件版本产生各种问题):
sudo apt-get update
并安装Ros软件包,这里介绍Desktop-Full安装(----推荐----ROS kinetic完整版):
sudo apt-get install ros-kinetic-desktop-full
(无论选择哪一种版本安装,都可以独立安装特定的ROS功能包集:
sudo apt-get install ros-kinetic-PACKAGE
并且可以用以下命令来查看可使用的功能包集:
apt-cache search ros-kinetic)
5.为系统设置并初始化rosdep(用于检查和安装软件包依赖的一种工具):
sudo rosdep init
rosdep update
6.设置环境变量:
( .bashrc文件在用户的 home 文件夹下( /home/用户名/.bashrc )。每次用户打开终端,这个文件加载命令行或终端的配置。所以可以添加命令或配置方便用户使用。所以,在 .bashrc 文件结束时添加脚本,以避免我们每次打开一个新终端时都要重复输入命令)
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
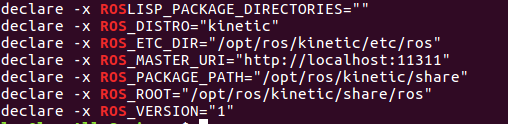
然后用下行命令确认环境变量已经设置正确:
export | grep ROS
如果一切正常,你应该看到了一组值(显示ROS_DISTRO和ROS_PACKAGE_PATH等环境变量的值),如下图所示:
7.安装building package的依赖
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
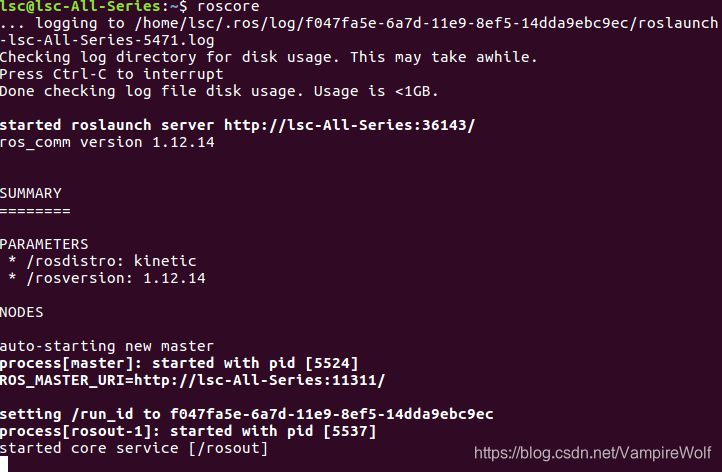
8.启动 turtlesim 测试 ROS安装
(1)打开一个终端(Ctrl+Alt+T),输入指令:
roscore
(2)打开一个新的终端,输入指令:
rosrun turtlesim turtlesim_node

(3)再打开一个新的终端,输入指令:
rosrun turtlesim turtle_teleop_key
分三个终端的目的是让三个指令同时进行。如果一切正常,应该看到如下所示的图形窗口:
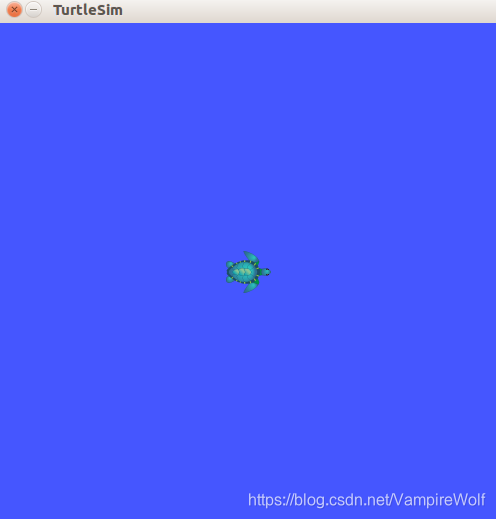
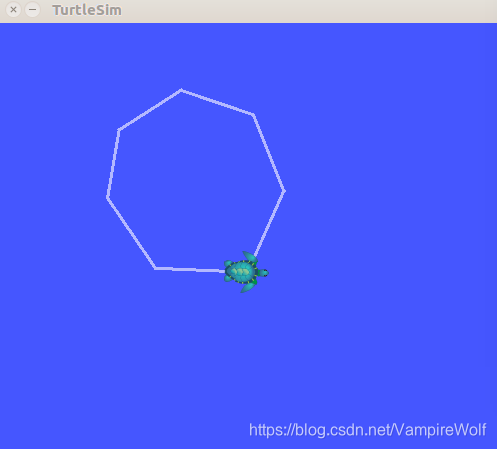
移动方向键,海龟就会响应你的命令开始移动了,并在屏幕上留下运动轨迹,如下图所示:

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









