




 本文深入探讨了图像处理中的角点检测技术,详细解释了角点的特性及其在目标匹配、跟踪和三维重建中的应用。文章介绍了常用的角点检测算法,如哈里斯角点检测,并提供了基于OpenCV的实现代码示例。
本文深入探讨了图像处理中的角点检测技术,详细解释了角点的特性及其在目标匹配、跟踪和三维重建中的应用。文章介绍了常用的角点检测算法,如哈里斯角点检测,并提供了基于OpenCV的实现代码示例。
1.1简介
在图像处理领域中,特征点又被称为兴趣点或者角点,它通常具有旋转不变性和光照不变性和视角不变性等优点,是图像的重要特征之一,常被应用到目标匹配,目标跟踪,三维重建等应用中。点特征主要指图像中的明显点,如突出的角点,边缘端点,极值点等等,用于点特征提取的算子称为兴趣点提取(检测)算子,常用的有哈里斯角点检测,FAST特征检测,SIFT特征检测及SURF特征检测。
1.角点
使用一个滑动窗口在以下三幅图中滑动,可以进行以下建模:
左图表示一个垂直区域,在各方向移动,窗口内部提示值均没有太大变化;
中图表示一个边缘特征(Edges),如果沿水平方向移动(梯度方向),则值会发生跳变;如果沿边缘移动(平行于边缘),则值不会发生变化;
右图表示一个角(Corners),不管你把它朝哪个方向移动,导致值都会发生很大的变化。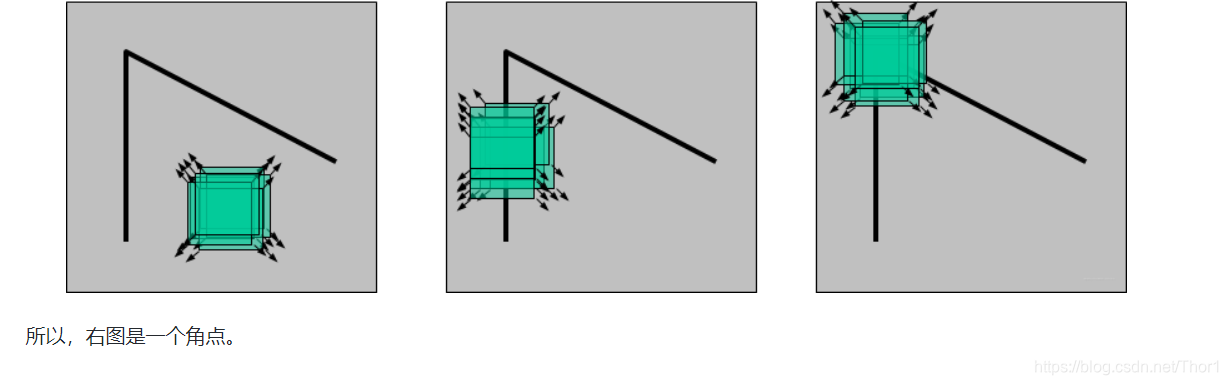
1.5基于OpenCV的实现
- API
在opencv中有提供实现Harris角点检测的函数cv2.cornerHarris,我们直接调用的就可以,非常方便。
函数原型:cv2.cornerHarris(src, blockSize, ksize, k[, dst[, borderType]])
对于每一个分辨率(x,y),在(blockSize x blockSize)邻域内,计算梯度图的协方差矩阵$ M(x,y)$,然后通过上面第二步中的角点响应函数得到结果图。图像中的角点可以为该结果图的局部替代。
即可以得到输出图中的局部顶点,这些值就对应图像中的角点。
参数说明:
src-输入灰度图像,float32类型
blockSize-用于角点检测的邻域大小,就是上面提到的窗口的尺寸
ksize-用于计算梯度图的Sobel算子的尺寸
k-用于计算角点响应函数的参数k,取值范围常在0.04〜0.06之间从matplotlib
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1193
1193

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









