




TOSUN同星最新发布的一款TL1011设备,不仅支持LIN2.2协议下的LIN通信与仿真,而且重点支持FastLIN模式,速率可支持到200 Kbps,通过FastLIN模式可以极大提升LIN刷写的速度和应用场景。TL1011配合功能强大的TSMaster软件,支持加载LDF数据库文件,可以很方便地监控、分析、仿真 LIN 总线数据,也可以支持UDS诊断、ECU高速刷写等功能。本文将介绍TL1011的FastLIN模式高速刷写配置与应用。
本文关键词:TL1011,FastLIN,LIN高速通信,LIN高速刷写
目录
Catalog
1. 技术背景
2. TL1011的FastLIN模式高速刷写配置与波形观测
3. TSMaster结合FastLIN模式下的高速刷写
4. 缩写
1、技术背景
LIN(Local Interconnect Network)通信标准是在 2010 年(LIN 2.2A,LIN 联盟)定义,后由国际标准化组织 (ISO) 收录,成为 ISO 17987 并于 2016 年正式发布。LIN属于低速串行通讯协议,通常速率是在0-20Kbps,其中LIN的通信设计初衷是为了满足汽车行业中对低成本、低速网络的需求,特别是在车身电子配件方面,如车窗、后视镜、大灯、空调控制等。
近年来车内氛围灯也普遍采用LIN通信,单车的氛围灯的节点数量较多,氛围灯供应商或者OEM厂商对车载氛围灯的控制器刷写速度提出更高的要求,对此,部分氛围灯采用高速FastLIN模式的LIN控制器,其LIN通信速率可达200Kbps,在LIN烧录时具有更高的带宽和刷写速度,高效且稳定。
在此背景下,TL1011的FastLIN模式应运而生,其支持FastLIN模式,通信速率支持达200 Kbps,使用FastLIN模式下可以极大提升LIN ECU的刷写速度,加快工序节拍,适用于支持FastLIN模式的LIN 控制器的各种烧录和高速通信场景。
2、TL1011的FastLIN模式高速刷写配置与波形观测
对于TL1011的FastLIN模式下的高能通信配置与应用,本文采用两个TL1011分别仿真LIN主节点和LIN从节点控制器进行通信和测试,并从硬件通信选择与配置开始讲解如何使用,并结合示波器的LIN波形解析功能,进一步展示FastLIN模式下的波形和通信时间参数对比。
2.1 FastLIN模式的工程配置与发送
首先连接两个TL1011到电脑上,打开TSMaster软件的【硬件】菜单,在【通道选择】配置LIN通道数量为2,并分别选择两个TL1011的通道。如图1。

图1: TL1011的LIN通道选择
然后在【总线硬件】的总线通道配置中,选择【LIN1】进行波特率配置,在参数【波特率(Kbps)】中,可以直接用鼠标选中值并用键盘输入“200”,然后调整所需的协议版本等,点击右上角的【应用】按钮,此时通信波特率已设置为200Kbps。如图2。
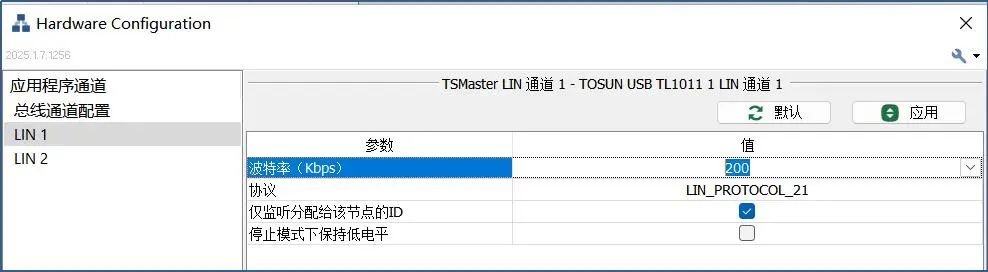
图2: LIN1 通道波特率配置
同理,可将LIN2的通信波特率设置为200Kbps。如图3。
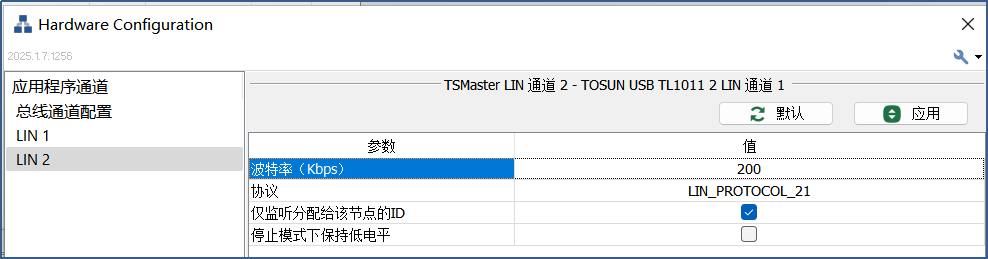
图3: LIN2 通道波特率配置
接着,分别创建两个两个LIN发送窗口,其中LIN发送#1设置为主节点模式,并创建调度表的ID,通道1以及相应的报文发送方向,数据长度。LIN发送#2设置为从节点模式(即不使能主节点模式),并设置从节点发送ID、通道、方向、长度、数据内容等。分别部署运行。如图4。
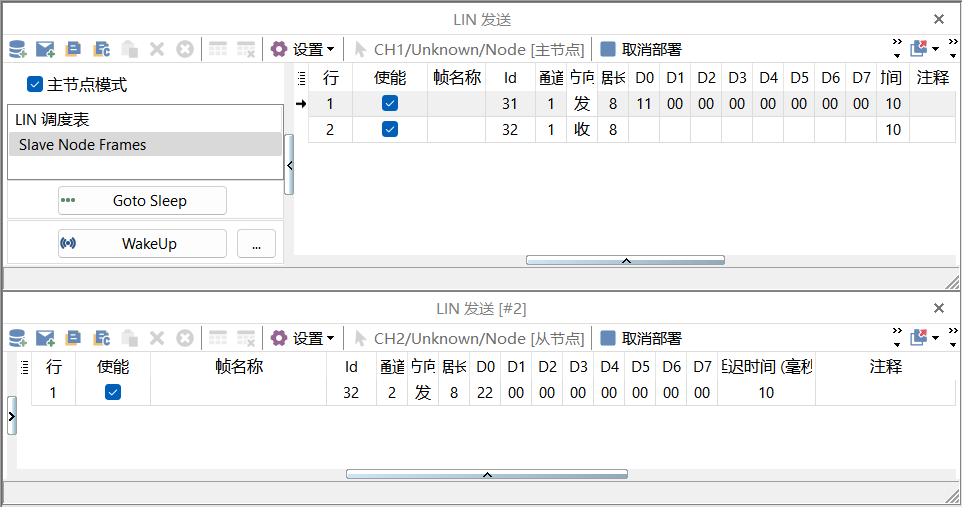
图4: LIN发送配置
在LIN报文消息窗口中,可以观察到LIN1和LIN2通道仿真的报文进行收发正常。如图5。

图5: LIN报文消息
2.2 通过示波器观察FastLIN下的波形
本文使用Picoscope示波器的通道A探头连接到LIN线,探头地连接到LIN地线,可以进一步观察此时LIN波特率为200Kpbs的波形时间参数特性。并使用LIN串行解码功能,设置解析波特率为200kbps进行解码。如图6。
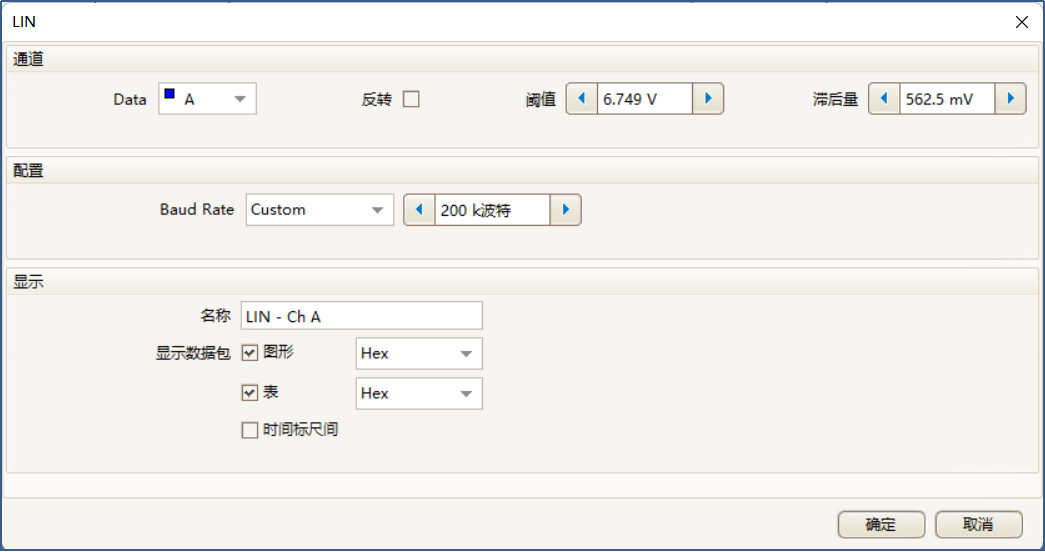
图6: 示波器的LIN解码配置
从示波器的波形中,观测到同步位0x55的一个位时间为5.015us,其波特率转化为199.4Kpbs,符合波特率抖动范围。同时可以观察到整体LIN波特整洁稳定,通过串行译码可以准确无误地解析出LIN报文ID的所有细节。如图7。
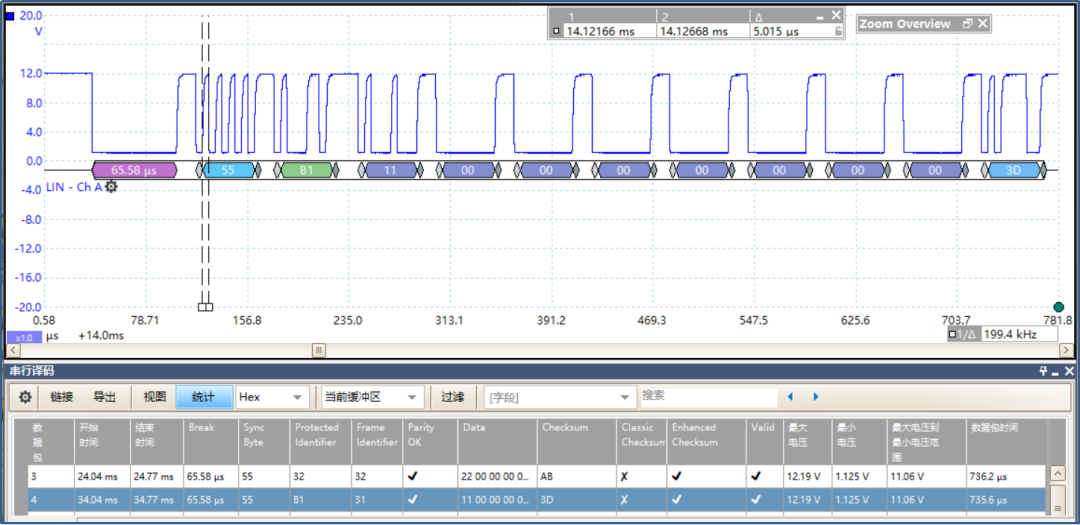
图7: FastLIN模式下200Kbps的波形
使用相同的FastLIN测量环境,只修改两个FastLIN通道的波特率为150Kbps,并使用示波器进行观测。同样以同步段的一个位时间进行测量为6.664us,其对应波特率为150.1Kbps,符合波特率抖动范围。如图8。
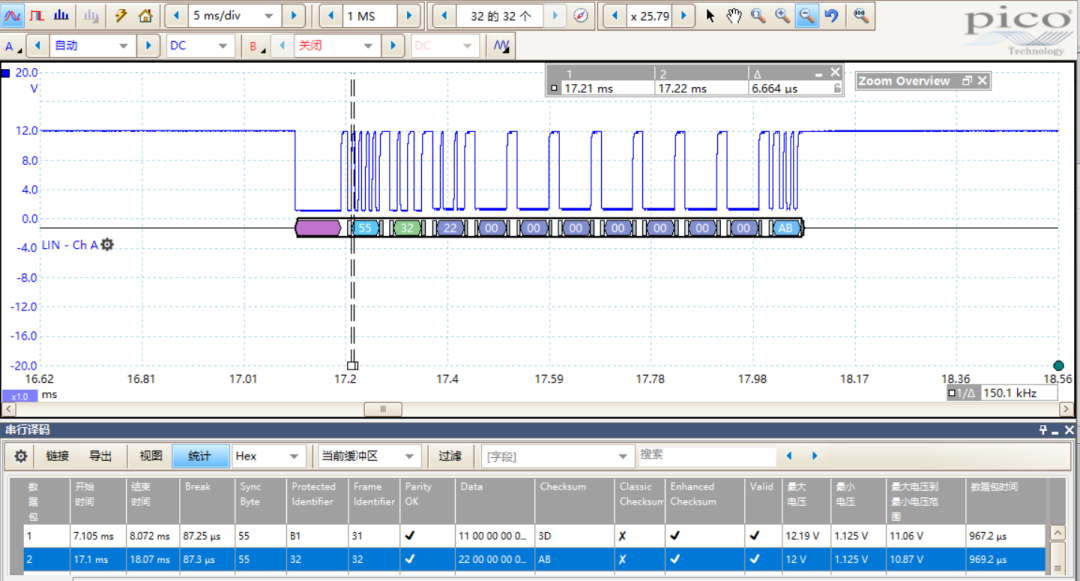
图8: FastLIN模式下150Kbps的波形
3、TL1011结合FastLIN模式下的高速刷写
TSMaster的诊断刷写功能不仅支持标准LIN、CAN、CAN FD、DOIP的UDS刷写,在TL1011的FastLIN模式的加持下,可以实现基于UDS的Flash Bootloader高速刷写,适用于各种FastLIN模式下LIN控制器的高速烧录和通信场景。
3.1 FastLIN模式的硬件设置
在FastLIN模式下主要配置更高的LIN波特率,以200Kbps为例。如图9。
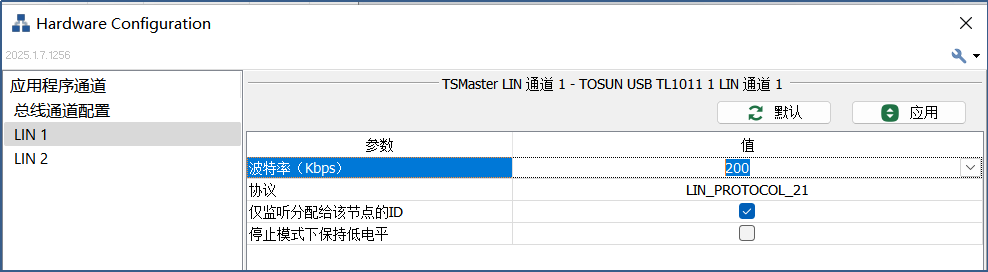
图9: 配置波特率200Kbps
3.2 LIN诊断传输层
在TSMaster的基础诊断模块中,总线类型选择为LIN,默认支持FastLIN模式,并可以设置LIN 控制器的NAD节点地址。如图10。
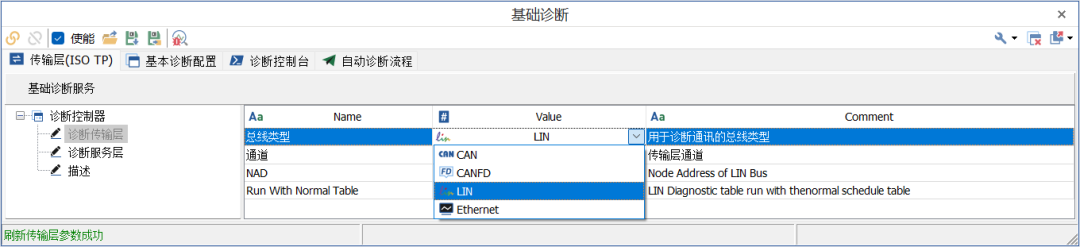
图10: LIN诊断传输层配置
3.3 诊断服务层间隔时间与种子密钥
诊断服务层可以设置LIN的请求(0x3C)与应答(0x3D)的诊断间隔时间参数,以及0x3D应答重试次数。如图11。
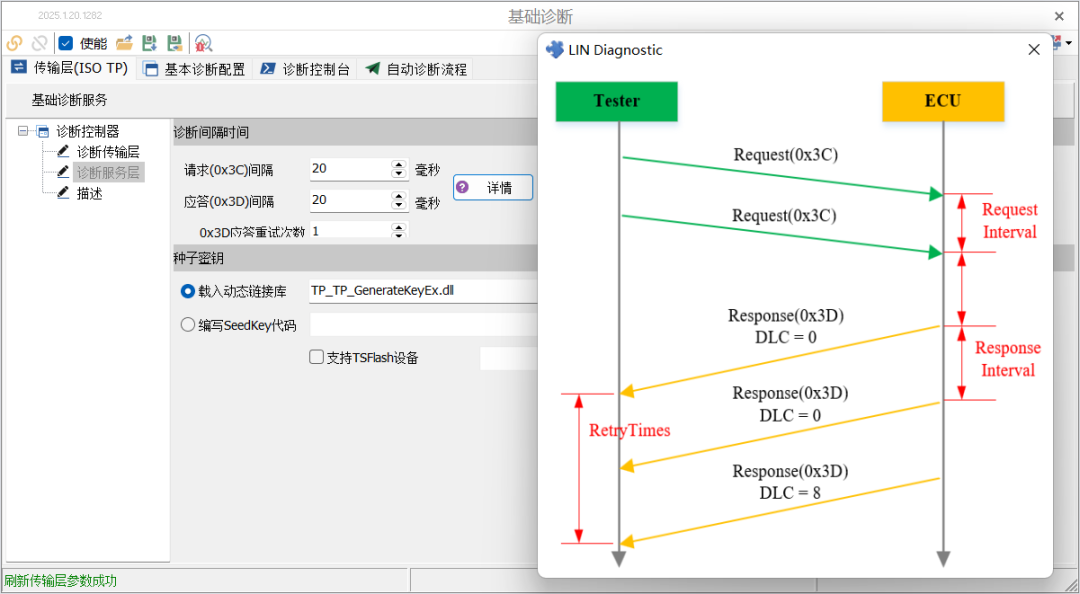
图11: LIN诊断服务层间隔时间配置
在TSMaster 中提供了两种 SeedKey 种子密钥的处理方法。第一种就是常用的加载主流的种子密匙的 DLL 动态链接库,并支持WIN32和DotNET两类动态链接库;第二种是提供了内置的种子密钥的解释器,可以直接编写 SeedKey 源代码,并可以保存生成 DLL 动态链接库。如图12。
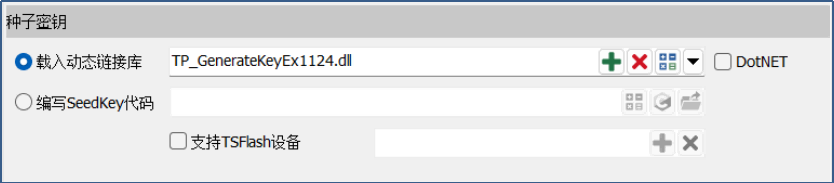
图12: 种子密钥
3.4 诊断基础服务配置与文件下载组合服务
在LIN基本诊断配置中,可以根据诊断服务类型创建服务指令,配置好每个服务的请求和应答的相关参数。如图13。
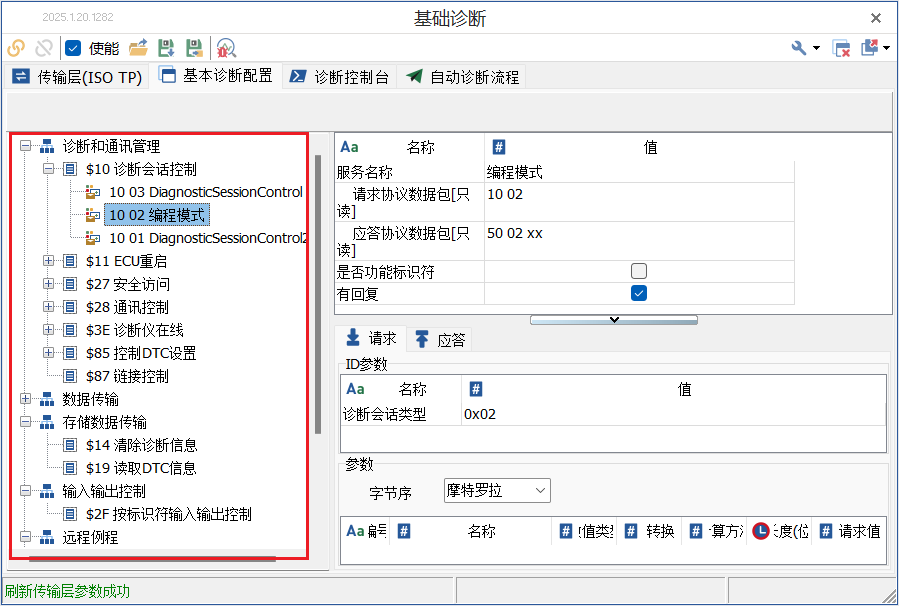
图13: LIN基本诊断配置
文件下载组合服务,能够根据加载的数据文件自动生成0x34,0x36,0x37服务步骤流程,支持多种主流的数据格式如hex,bin,s19,vbf等等,并支持多种文件校验方式、擦除方式 、下载控制、传输退出的校验以及文件拆分后下载,地址偏移等。如图14。
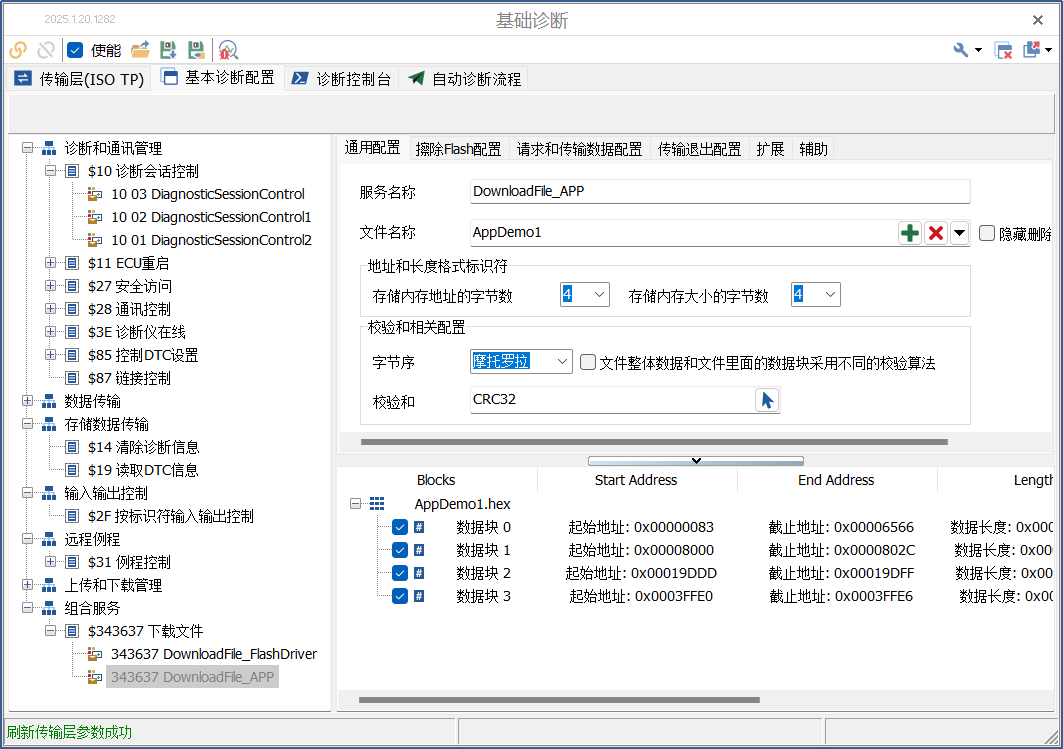
图14: 文件下载组合服务
3.5 自动诊断流程一键实现FastLIN的高速刷写
在自动诊断流程中,基于已创建好的基础诊断服务,快速创建一个完整的FastLIN的UDS诊断刷写流程,并通过一个按键执行刷写,并可以进行自定义次数的重复刷写。如图15。
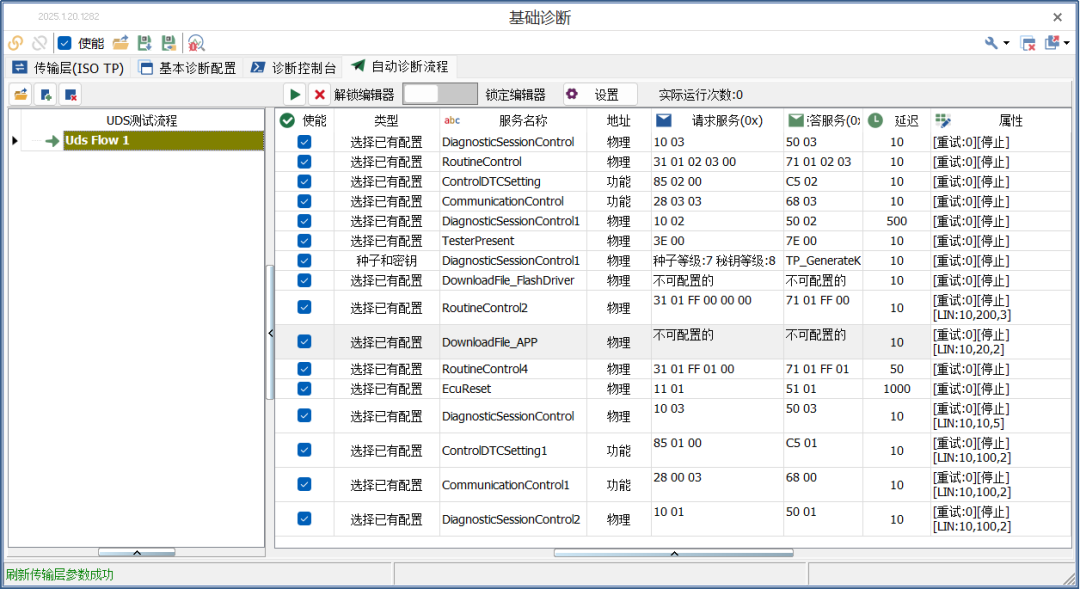
图15: FastLIN的UDS诊断刷写流程
在实际的LIN或FastLIN刷写场景中,存在服务指令设置相应的LIN时间参数。对此,在自动诊断流程中可以设置LIN参数,支持用户自定义请求与应答的时间间隔,以及应答次数。如图16。
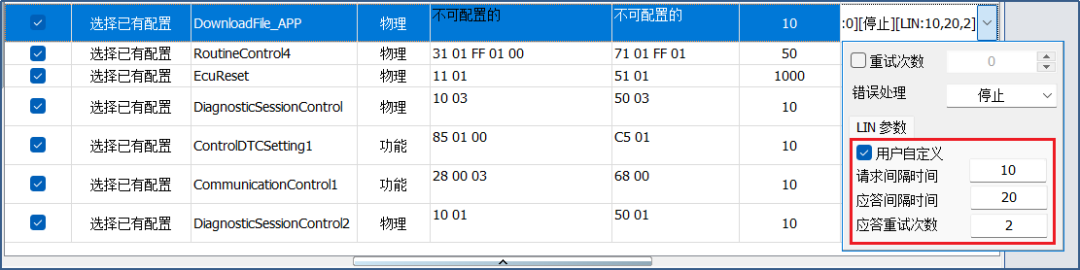
图16: LIN时间参数用户自定义配置
4、缩写
|
LIN |
Local Interconnect Network |
|
CAN |
Controller Area Network |
|
CAN FD |
CAN with Flexible Data-Rate |
|
DLL |
Dynamic Link Library |
|
ECU |
Electronic Control Unit |
|
ID |
Identifier |
|
UDS |
Unified Diagnostic Services |


















 11万+
11万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











