



import os
import cv2
import argparse
import numpy as np
class CheckBoard:
def __init__(self, points_per_col, points_per_row, square_size) -> None:
self.points_per_col = points_per_col
self.points_per_row = points_per_row
self.square_size = square_size
self.patten_size = (self.points_per_row, self.points_per_col)
self.corners_world = []
for row in range(self.points_per_col):
for col in range(self.points_per_row):
self.corners_world.append([float(col * self.square_size), float(row * self.square_size), 0.0])
self.corners_pixel_all = []
def add_corners_pixel(self, img):
self.img_size = (img.shape[1], img.shape[0])
corners_pixel = []
found, corners_pixel = cv2.findChessboardCorners(img, self.patten_size, None)
if found:
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.1)
cv2.cornerSubPix(img_gray, corners_pixel, (5, 5), (-1, -1), criteria)
self.corners_pixel_all.append(corners_pixel)
return True
else:
return False
def caliCam(self):
if len(self.corners_pixel_all) < 3:
print("Not enough images")
return None
obj_points = []
img_points = []
for i in range(len(self.corners_pixel_all)):
obj_points.append(self.corners_world)
img_points.append(self.corners_pixel_all[i])
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(np.array(obj_points, dtype=np.float32), img_points, self.img_size, None, None)
return ret, mtx, dist, rvecs, tvecs
if __name__ == "__main__":
np.set_printoptions(suppress=True, precision=5, linewidth=500)
parser = argparse.ArgumentParser(description='Camera Calibration')
parser.add_argument('path', type=str, help='images forder', required=True)
parser.add_argument('--rows', type=int, help="rows of checkboard", default=8) # 8x11, 21mm
parser.add_argument('--cols', type=int, help="cols of checkboard", default=11)
parser.add_argument('--square_size', type=int, help="size (mm) of checkboard", default=21)
parser.add_argument('--verbose', action='store_true', help='show image')
args = parser.parse_args()
img_forder = args.path
if not os.path.exists(img_forder):
print(f"path {img_forder} not exist")
exit(0)
rows = args.rows
cols = args.cols
square_size = args.square_size
verbose = args.verbose
img_files = os.listdir(img_forder)
imgs = []
for img_file in img_files:
img = cv2.imread(os.path.join(img_forder, img_file))
if img is not None:
imgs.append(img)
if verbose:
cv2.namedWindow("img")
# 交叉点的行数,列数,每个交叉点的边长
cb = CheckBoard(rows, cols, square_size)
for i, img in enumerate(imgs):
res = cb.add_corners_pixel(img)
if res:
if verbose:
cv2.drawChessboardCorners(img, cb.patten_size, cb.corners_pixel_all[-1], True)
cv2.imshow("img", img)
key = cv2.waitKey(0)
if key == ord('q') or key == 27:
break
else:
print("{} : failed".format(img_files[i]))
cv2.destroyAllWindows()
ret, mtx, dist, rvecs, tvecs = cb.caliCam()
print("ret:\n", ret)
print("mtx:\n", mtx)
print("dist: (k1,k2,p1,p2,k3)\n")
print("dist:\n", np.array2string(dist[0], separator=', '))
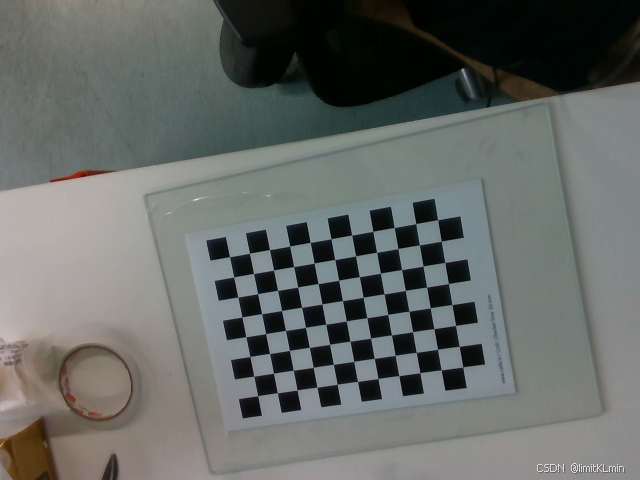
如图,交叉点的行数为8,列数为11,黑色矩形的边长为21mm。


















 1802
1802

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









